无人机自组网研究进展综述
2015-12-31张衡阳戚云军
卓 琨 ,张衡阳 ,郑 博 ,2,戚云军
(1.空军工程大学信息与导航学院 西安 710077;2.中国人民解放军94188部队 西安 710077)
1 引言
无人机(unmanned aerial vehicle,UAV)具有用途多样、灵活性强、装配便利和开支较低等优势,在军用、民用领域得到了广泛的关注和发展。多无人机系统(multi-UAV system)协同应用比单个无人机系统具备可生存性更强、可扩展性更高、完成任务更快等优势,同时也带来了诸多实际问题,其中最为重要的基础性问题就是多无人机间的协同通信,如何设计适应未来发展需求、高效的多无人机通信网络已成为亟待解决的问题。
美军在近期发布的《无人机路线图》[1]和《无人系统一体化路线图》[2]中都将无人机明确规划为未来全球信息栅格(global information grid,GIG)中的重要节点,并指出自组网将会是未来无人机战术互联网络的发展方向。无人机自组网(UAV Ad Hoc network,UANET)的概念在这种背景下应运而生,它将移动自组网 (mobile Ad Hoc network,MANET)和车载自组网(vehicle Ad Hoc network,VANET)的概念拓展到无人机网络通信中,使网络中的各无人机能够分发和传递指控指令、感知态势和采集数据等信息,具备有效扩展网络系统规模,提供安全可靠、抗毁性强的网络通信,支持多无人机战术协同,有效降低无人机的载荷量、开支,可辅助其他通信方式,大幅提高无人机作战平台战术效能等优势。
2 无人机自组网简介
2.1 基本概念
无人机自组网,也称无人机网络(network of UAV)[3]或无人航空自组网 (unmanned aeronautical Ad Hoc network,UAANET)[4],基本思想是:多无人机间的通信不完全依赖于地面控制站或卫星等基础通信设施,而是将无人机作为网络节点,各节点间能够相互转发指控指令,交换感知态势、健康情况和情报搜集等数据,自动连接建立起一个无线移动网络。该网络中每个节点兼具收发器和路由器的功能,以多跳的方式把数据转发给更远的节点。
无人机自组网采用动态组网、无线中继等技术实现无人机间的互联互通,具备自组织、自修复的能力和高效、快速组网的优势,可满足无人机在特定条件下的应用需求,是对现有无人机通信体系的补充和完善,具有重要的理论研究和实践应用价值。
2.2 主要特点
无人机自组网是无线自组网的一类特殊形式,不仅具有固有的多跳、自组织、无中心等特点,还具备自身的特殊性,主要特点介绍如下。
(1)节点的高速移动和网络拓扑的高动态变化
这是无人机自组网与传统自组网最显著的区别,参考文献[1]指出,无人机的速度在30~460 km/h,这种高速移动会造成拓扑高动态变化,从而对网络连通性和协议性能产生严重影响;同时,无人机平台的通信失效和视距通信链路的不稳定性也会造成链路中断和拓扑更新。
(2)节点的稀疏性和网络的异构性
无人机节点在空中分散分布,节点间的距离大都有几公里,一定空域内节点密度较低,因此网络连通性是一个值得注意的问题。在无人机的实际应用中,无人机还需要与地面站、卫星、有人驾驶飞机、临近空间平台等不同平台进行通信连接;自组网结构可能会包括不同类型的无人机或采用分层分布式结构。在这些情况下,节点都存在差异性,整个网络可能是异构互联的。
(3)节点能力较强和网络临时性明显
节点的通信和计算设备都由无人机提供空间和能量,除mini型外一般都能满足。相比于传统MANET,无人机自组网一般不需要额外考虑节点的能耗和计算能力问题;GPS的应用可为节点提供精确的定位、授时信息,便于节点获得自身位置信息和进行时钟同步;利用机载计算机的路径规划功能可有效辅助路由决策。无人机应用大多针对特定任务展开,运行规律性不强,在一定空域内存在着节点密度较低、飞行不确定性较大的情况,因而网络具有更强的临时性。
(4)网络目标的独特性
传统Ad Hoc网络的目标是建立对等连接,而无人机自组网也需要为无人机的协调和协作功能建立对等连接;其次,某些节点在网络中还需要担任数据收集的中心节点,功能类似于无线传感器网络,因此需要支持流量汇集;再次,网内可能包括多类型传感器,不同传感器的不同数据交付策略都需要得到有效保障;最后,业务数据所包括的图像、音频、视频等,具有传输数据量大、数据结构多元化、时延敏感性高等特点,需要确保相应的QoS。
(5)移动模型的特殊性
移动模型会对Ad Hoc网络的路由协议、移动性管理等产生重要影响。不同于MANET随机移动和VANET受限于公路移动,无人机节点也具有自身独特的运动规律。在某些多无人机的应用中,偏向于选择全局路径规划,这种情况下无人机的移动具有规律性;但自动化无人机运行航迹不是预定的,飞行计划也可能会在运行中变更。参考文献[5]针对执行侦察任务的UAV提出了两种移动模型:第一种是实体随机移动模型,依据预定的马尔可夫过程进行左转、右转和直行方向的概率独立随机运动;第二种是群组分布式信息素排斥模型 (distributed pheromone repel mobility model,DPR),根据UAV侦察过程中产生信息素的数量来引导无人机移动,具有可靠的搜寻特性。参考文献[6]针对在某一区域内盘旋运动的UAV,提出了一种半随机圆周移动(semi-random circular movement,SRCM)模型,利用一个二维圆形区域推导出节点移动概率的近似分布函数。参考文献[7]针对UAV在运行航迹中需要克服急停和急转现象、保持平滑航迹的需求,提出了一种增强型高斯马尔可 夫 移 动 模 型 (enhanced Gauss-Markov mobility model,EGM),通过对GM模型(高斯马尔可夫模型)的方向偏离进行修正,可有效实现边界避免机制,并获取更真实的UAV运动轨迹。
2.3 应用优势
(1)提高多无人机系统的可扩展性
多无人机系统如果都只能与基础通信设施进行通信,则其运行范围就会局限在设施的覆盖范围内,如果某个无人机不能建立通信连接就会导致无法运行。而无人机自组网能够拓展多无人机系统的运行范围,即使某个节点无法与基础通信设施连接,仍可与其他无人机建立多跳通信链路。
(2)提供可靠、抗毁性强的多无人机间通信
地形情况会对设施的覆盖范围和信号传播产生一定的影响,如山脉、建筑物等障碍物,都会对信号传播产生阻碍。无人机自组网能够有助于多无人机系统在障碍物之间运行。当网络中某节点通信受阻时,如采用自组网结构就可利用网络自愈性,通过与其他无人机保持连通就能减少对基础设施的依赖,增强了多无人机系统运行的可靠性。
(3)支持无人机集群战术协同
无人机集群任务协同多采用分布式控制,成员间必须能够相互通信以实现协调化,而自组网结构可有效防止集群内成员的碰撞,有效协调各成员,从而完成各项任务。
(4)有效辅助其他通信方式
运用无人机自组网可对其他通信方式起到辅助作用。可与地面测控站、无限传感器网络、高空卫星、其他航空器等组成一体化空天地信息网络,通过多无人机的移动将不同层面的信息进行有效中继,起到区域通信节点、有效补盲等作用。
(5)降低无人机的载荷量和开支
载荷重量对于无人机而言具有重要意义,重量越轻意味着飞行高度越高、航程越远。在无人机自组网中只需小部分无人机配备较沉重、昂贵的基础通信设备,而其他无人机携带较轻、便宜的自组网设备便能维持网络运行,具有较高的灵活性和经济性。
3 组网关键技术的研究进展
无人机自组网是基于航空无线信道且高动态变化的无线网络,参考文献[8]认为无人机节点的高速移动会带来网络拓扑的剧烈变化,从而造成传统组网协议无法直接应用。所面临的主要问题包括如下几个方面:
· 物理层需要考虑节点密度、节点间距离和通信链路变化,以解决多普勒频移和衰落问题;
·MAC协议要实现公平接入机制,在共享的航空信道中实现数据接入的低碰撞概率、高速低时延传输;
·路由协议需要适应带宽受限和链路状态快速变化的条件,以进行路由信息分发和维护,并能与其他网络兼容互联;
·传输协议则要针对环境高动态变化加强网络的流量控制和拥塞控制,避免造成网络拥塞、降低网络性能;
· 应用层要针对通信需求和网络条件的变化,协调协议栈各层协作;
· 需要特别注意,无人机一旦遭受窃听、攻击、欺骗等将会引起严重后果,必须对网络的安全体系结构和专用安全技术展开研究;
· 网络管理涉及多个方面,包括地址管理、服务管理和移动性管理等,需要不同机制的协同应用来解决相应的网络管理问题。
无人机自组网网络协议和算法的设计应综合考虑多方面问题,在带来最小性能下降的条件下确保网络正常运行。
3.1 MAC协议
MAC协议直接控制无线信道上分组的收发,对网络性能优劣起着决定性作用。无人机自组网除了要解决隐藏、暴露终端和公平性等自组网MAC层普遍性问题之外,节点的高移动性、通信距离不断变化造成的链路质量频繁波动和突发优先级高、实时性强的武器控制、安全类信息的实时可靠传输都是挑战性问题。依据不同的信道接入策略,现有无人机自组网MAC协议的分类如图1所示,具体介绍如下。
(1)基于竞争类MAC协议
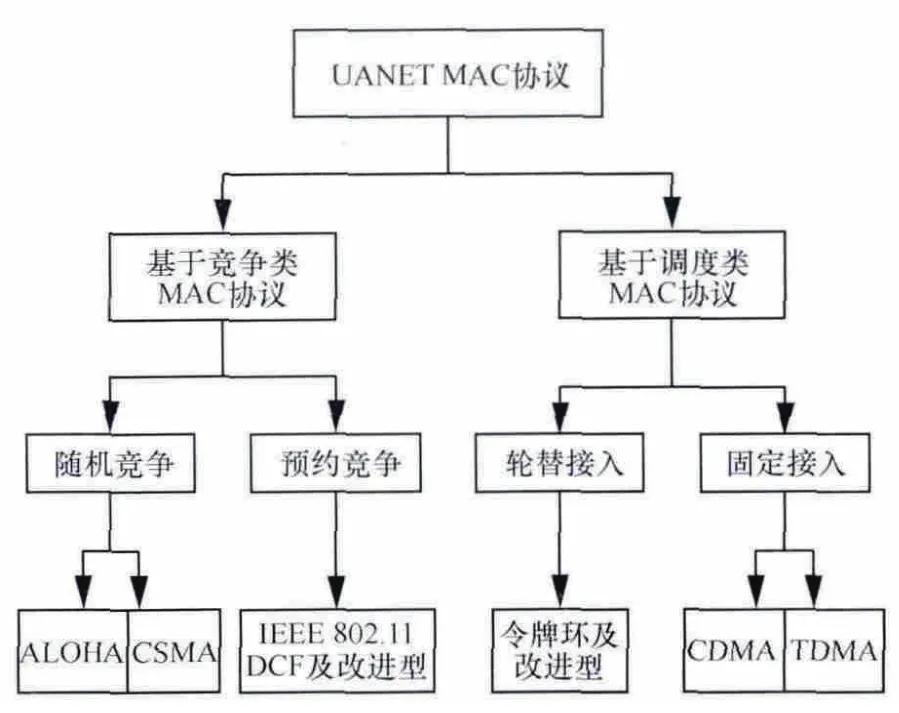
图1 无人机自组网MAC协议分类
基于竞争类MAC协议主要包括随机竞争和预约竞争。由于随机竞争类MAC协议的传输碰撞概率较大,会造成传输成功率、信道利用率随业务量增长性能严重下降,一般多采用基于IEEE 802.11DCF的预约竞争类MAC协议,其核心机制是CSMA/CA。
第一个无人机自组网的实例采用了MANET中MAC层设计常用的基于全向天线的IEEE 802.11标准[9],大多数无人机自组网路由协议研究也默认采用该协议,通过使用RTS/CTS机制能有效解决隐藏终端问题,但航空环境中不可忽视的传播时延会对协议性能造成较大影响。参考文献[10]使用两个无人机节点和一个地面节点建立了可重构的IEEE 802.11s mesh网络,真实飞行结果表明IEEE 802.11s是一种有效方案。参考文献[11]统计分析了单跳无人机自组网在衰落信道条件下非饱和流量数据分组的时延性能,其MAC层基于IEEE 802.11 DCF模型,通过将每个节点建模成排队系统得到了平均时延。
(2)基于调度类MAC协议
基于调度类MAC协议主要分为轮替接入和固定接入两类,通过对网络资源的预先规划来保证节点的通信需求。由于采用了冲突避免的预规划方式,在网络负载较重时仍可保证一定的吞吐量和时延性能,但无法保证高优先级突发业务的实时传送需求。
轮替接入多采用令牌环(Token)方式,参考文献[12]中提出了一种基于全双工和多分组接收的无人机自组网MAC层令牌协议,通过令牌结构和信道状态信息更新可有效消除碰撞,在不完全信道状态信息条件下仿真验证了MAC协议的有效性。参考文献 [13]假设采用CDMA的无人机自组网节点具有多用户感知能力,其MAC层采用了一种令牌循环方案来解决隐藏节点的查找、码元分配和协作传输等问题,理论分析和仿真结果表明,该方案在网络负载较重时仍然适用。国内空军工程大学[14]针对Ad Hoc网络结构的无人机编队,对固定TDMA协议加入了业务优先级和竞争机制,使协议性能有了一定提高,但仍需进一步优化。
对于常用MAC协议在无人机自组网中的应用,不同类型的协议具有各自的特点和优劣,在网络负载较重时不同协议的性能比较情况见表1。

表1 无人机自组网MAC协议比较
从表1中可看出,传统MANET MAC协议并不能直接在无人机自组网中应用,这是由航空环境中节点间距离较远、通信链路质量波动频繁等问题造成的,必须加以相应改进才能应用;无人机在其主要应用的军事场合中担负情报侦查、目标摧毁等任务,对于移动目标、武器控制等实验敏感信息的传输有着极高的实时性、可靠性传输需求,但现有MAC协议在网络重负载时并不能提供有效支持 (竞争类碰撞概率较大、调度类无法解决分组接入的固定等待时延),因此有必要对具备优先级区分、扩展性好、QoS保障、高速低时延传输能力的MAC协议展开研究。
3.2 路由协议
现有MANET、VANET中的路由协议无法适应无人机通信环境中的路由信息频繁变化,而无人机自组网路由协议则要适应节点高速移动带来的拓扑变化剧烈、链路寿命短暂等特点。目前无人机自组网使用的路由协议分类情况如图2所示,具体介绍如下。
(1)静态路由
静态路由是指具有静态路由表且不需要更新的路由,多用于具有固定拓扑、无需任务更新的场合,但不具备容错和适应动态环境的功能。以下两种路由属于静态路由。
负载携带和传递路由[15](load carry and deliver routing,LCAD):无人机自组网较早采用的路由协议,其目标是在增加安全性的同时最大化网络吞吐量,通过最小化跳数的方式实现批量数据传输和时延容忍需求,其不足之处在于随着节点间通信距离的不断增大,时延会明显增加。
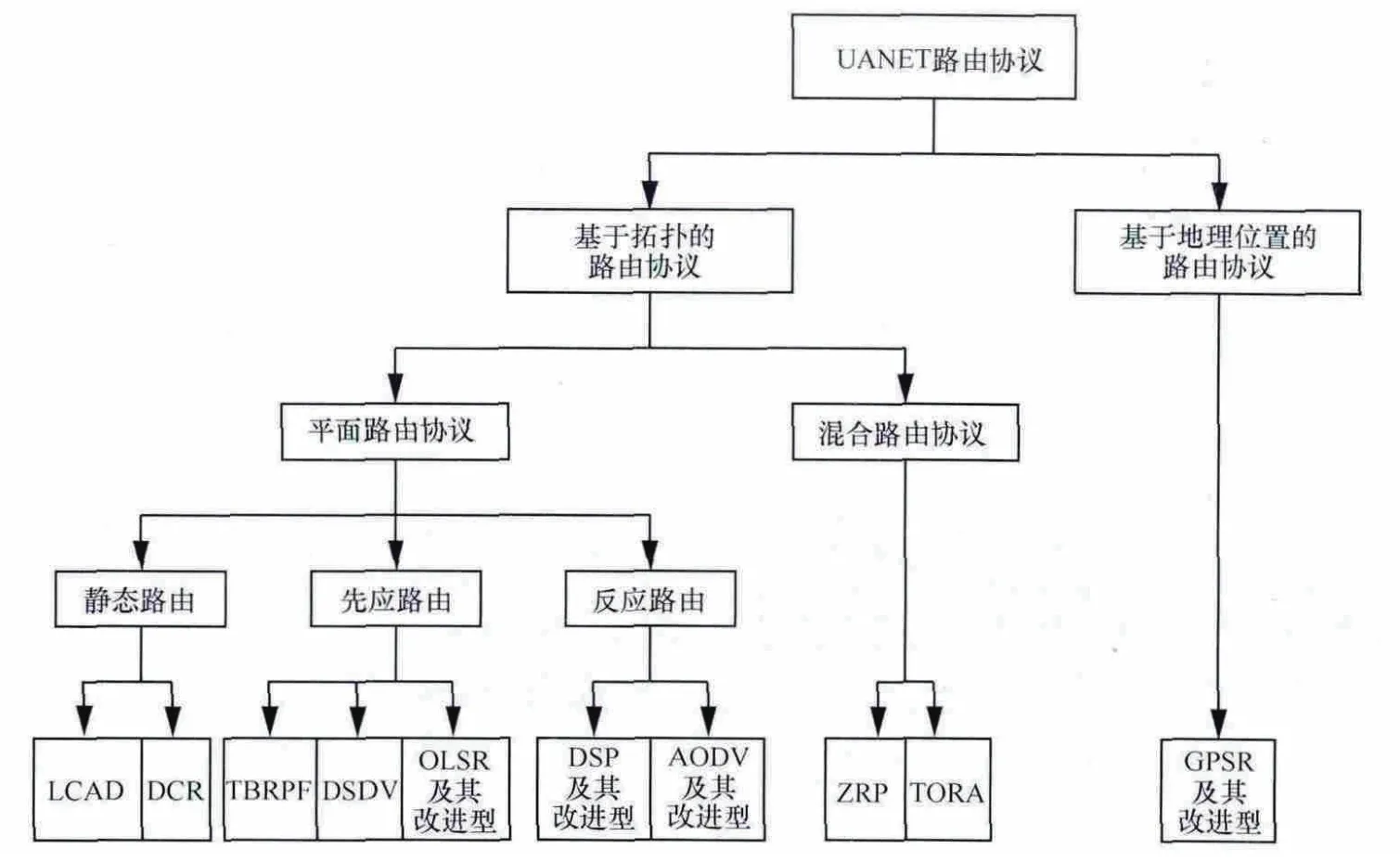
图2 无人机自组网路由协议分类
数据中心路由[16](data centric routing,DCR):实际应用中多无人机还存在着一对多的数据传输需求,该路由可为不同应用模式提供相应支撑。其典型应用结构是“发布—订阅”模式,能在数据发布者和订阅者之间实现自动连接,还可进行流量汇集;与泛洪的不同之处在于,只需给订阅者调度已注册的数据类型、内容。由于所需协同最小,当系统包括有限数目的无人机并有预定规划路径时更倾向于选择这种模式。
(2)先应路由
此类路由也称主动式路由协议,会对路由表进行周期性更新,不同协议的区别在于更新机制的不同。优势在于存储了路由信息,无需等待即可选择发送端到接收端的传输路径;但缺点也是明显的,会产生大量的控制开销且收敛速度较慢。
SRIInternational首次对无人机自组网结构进行了实验[17],采用了基于反向路径转发的拓扑广播 (topology broadcast based on reverse-path forwarding,TBRPF)协议,用于最小化网络层开销。
[18]提出了无人机自组网的一种基于定向天线的定向优化链路状态路由(directional optimized link state routing,DOLSR)协议,通过使用多中继点降低传输开销和最小化时延。参考文献[19]提出了prediction-OLSR协议,利用GPS信息辅助路由决策,同时以节点间的相对速度对期望传输计数度量进行加权。
参考文献[20]针对3种不同的先应式路由协议:目标序列距离矢量(destination-sequenced distance-vector,DSDV)、OLSR、hierarchical-OLSR的适应性进行了比较分析,通过网络仿真比对了不同移动速度对网络性能 (包括交付率、开销、平均跳数、平均时延)的影响。参考文献[21]提出了一种基于移动性和负载感知的ML-OLSR协议,在OLSR协议中加入了移动性和负载感知算法,获得了更好的交付率和时延性能。
(3)反应路由
这类路由也称为被动或按需路由协议,当需要发送消息时才会按需寻找路径,可有效减少控制开销,但也会在路由寻找过程中产生高时延。
参考文献 [22]开发了一种基于动态源路由(dynamic source routing,DSR)的无人机自组网试验平台,在该协议中,只有当数据需要发送时源节点才会寻找到目的节点的路径。参考文献[23]发现因为节点的高移动性和拓扑的不稳定性,DSR比先应式协议更适合于无人机自组网。
参考文献 [24]针对无人机自组网提出了一种改进的UAV-DSR协议,通过对拥塞状态和能量等级的划分来确立不同的RREQ响应对策;参考文献[25]针对强信号无人机网络提出了一种限制路由请求最大跳数策略的REDSR,可节约节点的路由存储空间并降低路由开销;参考文献 [26]针对小型无人机自组网侦查任务提出了一种UEDSR,引入能量平衡机制降低了热点的过度能耗,延长了网络寿命。
参考文献[27]提出了一种基于时隙请求的按需距离矢量(Ad Hoc on-demand distance vector,AODV)路由协议,使用专用时隙供一个节点发送数据分组,虽然增大了控制开销,但有效提升了分组交付率,减少了碰撞。参考文献[28]在AODV协议的基础上,在路由发现过程中以最小化跳数为目标,采用路径更新度、路径长度、路径可靠度作为路径选择准则。
参考文献[29]提出了基于节点可用邻居数和移动性的路由协议AODV-NM,通过对其阈值进行设置,可对链路质量进行判定并选择可靠路由。
(4)混合路由
混合路由协议是先应路由协议、反应路由协议的结合,能够克服先应路由协议控制信息开销较大和反应路由协议路由发现时延较大的不足。
区域路由协议(zone routing protocol,ZRP)基于区域的概念,通过在域间使用先应路由、在域内使用反应路由,可有效解决网络扩展性问题。ZRP最关键的问题就是簇的构造,参考文献[30]提出了一种分簇算法,先在地面分簇并计算簇的划分,然后依据地理信息推选簇首,依据任务信息调整分簇结构;参考文献[31]提出了另一种移动预测分簇算法,通过对网络拓扑的更新来解决簇更新问题,以字典trie结构和链路失效时间移动模型来预测无人机群的移动,并以模型和邻居节点推选簇首的权重进行加权运算。
参考文献[32]在临时按序路由算法(temporarily ordered routing algorithm,TORA)的基础上提出了无人机自组网的RTORA,采用开销减少机制克服了TORA反向链路失效造成的不利影响。
(5)基于地理位置的路由
由于无人机自组网节点的高移动性,先应路由维持路由表的方式并不是最优的,同时反应路由中每个分组在发送前重复寻找路径会造成大量开销。针对这些问题,相关研究人员提出了采用基于地理位置信息的路由协议。
参考文献[33]对无人机自组网的先应、反应和基于位置的路由协议进行了对比,显示了贪婪周边无状态路由(greedy perimeter stateless routing,GPSR)协议性能要优于先应和反应路由。参考文献[34]开发了基于位置路由的仿真框架,验证了GPSR协议适用于节点密度较大的无人机自组网。参考文献 [35]提出了地理位置移动导向路由(geographic position mobility oriented routing,GPMOR),使用高斯马尔可夫移动模型预测节点移动并确定下一跳。参考文献[36]针对无人机自组网采用传统贪婪转发策略时,在路由空洞发生时采用分组回收策略。
参考文献[37]针对无人机自组网的多媒体数据传输提出了一种改进的GPSR协议,兼顾了位置、速度、运动方向等因素来选择最优下一跳,并以路由节点所发送的反馈信息实现全局路径优化。
综上,对无人机自组网中使用的基本路由协议进行横向比较,比较结果见表2。
路由协议是无人机自组网的关键性问题之一,现有MANET路由无法完全满足无人机自组网的应用需求。针对不同的数据收集场景有着不同的应用模式需求:数据中心路由可有效支撑流量汇集模式,但还需结合具体应用场景需求进一步深入研究;平面对等模式对于无人机自组网成员的协调协作功能意义重大,由于节点自身具备了定位计算能力,GPSR协议展现出了更广阔的应用前景,但在具体场景下需结合不同数据类型的交付策略、QoS需求进行进一步改进;分层结构适应于大区域、多等级的布置,虽然能有效拓展网络规模、提升网络性能,但簇的构造、簇首推选、平面路由选取仍需针对特定场合加以研究改进。
3.3 传输协议
传输协议的主要功能是增强信息传输可靠性,实现拥塞控制和流量控制。无人机自组网的应用需求之一就是要提供可靠的通信结构,因而在高动态环境中建立可靠的传输机制是不可或缺的。

表2 无人机自组网路由协议比较
第一个无人机自组网实例采用了现有的传输协议,参考文献[38]采用了IP体系,其传输层可同时支持TCP和UDP,但TCP在MANET中性能较差,并不适用于无人机自组网。其流量控制功能基于帧机制和窗口大小而改变,对往返时间的精确估计是一个挑战性问题。
无人系统联合结构(JAUS)是无人系统的消息标准,虽然最初是针对地面无人系统提出的,但后续将推广到所有类型的无人设备。AS5669[39]定义了JAUS的数据通信结构,使用了特有的分组格式和语义,JTCP/JUDP被设计为TCP/UDP的上层封装。
STANAG 4586定义了北约无人机网络节点间通用的网络中心战传输协议,其目标是针对联合作战应用,增强地面控制站、无人机和C4I网络之间的互通性[40]。与JAUS不同,STANAG 4586是专门为无人机系统而开发的。
无人机自组网因为节点的高移动性和航空信道的高误比特率而有别于传统网络,但无人机的测控完全通过无线链路实现,因而可靠性对传输协议具有重要意义。在应用中,不同类型的数据需求的可靠性等级不尽相同,设计新的协议也必须要使用不同场合的不同需求。目前对无人机自组网而言还没有专门设计的传输协议,传输可靠性高、高效的传输协议值得进一步研究开发。
3.4 跨层协议设计
分层结构虽然在有线网络中取得了较好的应用效果,但在无线网络中无法完全胜任。跨层结构的提出就是为了解决无线网络的性能优化问题。
参考文献[41]提出了无人机自组网的一种跨层结构,通过合并OSI参考模型的下3层来促进信息交互,并提出基于定向天线的MAC层IMAC-UAV协议,网络层则使用了DOLSR协议,结果显示这种跨层结构可有效提升网络性能。
参考文献[42]提出了基于定向天线的网状—树算法,是一种结合MAC层和网络层分簇、路由策略的协同方案,能用一个算法来处理基于TDMA的MAC层时隙分配、网络层分簇和簇内节点到簇首的路由。该算法是一个顽健性和可扩展性都较强的方案,仿真结果表明其可显著提高网络性能。
跨层结构可有效满足高动态无人机自组网的应用需求,虽然目前对口研究还较少,但下一步仍具有广阔的研究前景。借助于分层结构,多层之间的交互可有效提升网络性能,例如链路状态信息这类比较重要的物理层参数,可对上层信道介入、路由转发提供重要依据;另一类思路是将多层协议合并为一个协议,可用于无人机自组网更高效的结构设计,值得注意的是,需要注意跨层结构的普适性和实现复杂性控制。
3.5 机会网络
在自组网的实际应用中,节点的稀疏分布、移动性等会造成网络的连通性无法保证,因此机会网络[43]得到了广泛的关注和研究。由于无人机自组网具有节点稀疏分布、拓扑高动态变化等特点,符合机会网络不一定存在完整连通路径的基本假设,因此也有一些利用机会网络对无人机自 组网 的 研 究 :Zhao Z L[44]和 Rosário D[45,46]等 认 为 无 人 机自组网的通信链路具有无法在任何时刻都保持连通的特点,可采用机会网络的分布式单跳路由决策。参考文献[44]提出了一种基于网络拓扑、链路质量、地理位置等多类网络参数的转发协调机制;参考文献[45]提出了一种分布式信标机会路由,采用跨层方案优化,可支持多媒体信息传输QoE;参考文献[46]提出了一种基于跨层链路质量和地理感知信标的机会路由,可支持多视频流传输。
参考文献[47]提出了一种可支持任意节点多发送连接的机会路由MSC,相比于传统延迟容忍网络(delay-tolerant network,DTN)路由,获得了更好的时延和分发成功率性能。
无人机自组网机会网络的研究有别于上述协议,网络假设的基本连通条件有着本质性差别,是在极端条件下的理论研究,对于推进无人机自组网的应用起到补充完善作用。目前的研究还主要集中在机会网络路由转发策略对QoS、QoE的支持,下一步的研究中符合无人机节点相遇情况的移动模型、机会通信数据的分发、检索机制、信任安全、节点协作机制、通信中间件等问题将需要进一步考虑。
4 实验平台开发现状
为了将无人机自组网的关键技术推向未来使用,全球各类研究机构开发了不同的实验平台对网络性能进行测试。依据不同类型可分为下列3类。
4.1 室外平台
第一个无人机自组网的试验平台由University of Colorado实现[48],在小型无人机上开发和实现了基于IEEE 802.11b的无线设备,网络层协议选择了DSR,同时在无线系统中嵌入了监视模块来详尽地描述和分析网络性能。
Berkley Aerobot Team(BEAR)[49]是另一个能支持无人机间通信的试验平台,研究设备包括BEAR直升无人机、固定翼无人机、无人地面机器人以及移动地面控制站等。BEAR中的旋翼无人机包含了能用于无人机自组网的IEEE 802.11模块。
英国的无人传感自动航空器(SUAAVE)项目[50]不仅仅局限于特定场景,还开发了基于搜寻—营救任务的平台。虽然该项目的第一个样本采用IEEE 802.11协议,但计划继续开发新的通信结构和协议。
美国佐治亚理工学院 (Georgia Institute of Technology)的无人机研究实验室(UAVRF)[51]通过运行不同的多无人机系统进行飞行测试来验证研究结果,此外也开发了基于IEEE 802.11的通信硬件平台[52]。
国内研究方面,北京航空航天大学[53]开发了多无人机系统,成功验证了无人机自组网的有效性和灵活性;西北工业大学[54]实现了无人机自组网的验证系统,基于IEEE 802.11b/g实现了机载嵌入式模块,网络层采用EODV协议,传输层采用优化的UDP,同时实现了基于H.264的视频传输系统和基于离线数字证书的安全通信协议。
4.2 室内平台
为了给快速原型和初始测试建立更可控的环境,也需要在受限可控空间内建立室内试验平台。
MIT航空控制实验室利用无人机试验平台——实时室内自动工具试验环境(RAVEN)[55]进行运动捕捉。该系统能完成直升机和飞机等特技飞行的快速原型、多直升机的顽健协调算法、基于视觉的室内飞行传感算法。
通用机器人自动化感知(GRASP)[56]是由美国宾夕法尼亚大学(University of Pennsylvania)开发的室内试验平台,通过微型无人机的动态飞行和相互协调,支持侦查、监视、操控和运输等任务应用。
4.3 仿真平台
另一类对无人机自组网的平台实验方式是通过开发仿真平台来研究相关算法。虽然目前有较多无线自组网仿真平台,但绝大多数都无法直接对无人机通信链路进行建模。
澳大利亚悉尼大学(University of Sydney)的实时多无人机仿真平台(RMUS)[57]是第一个能够支持无人机通信链路的多无人机仿真平台。它基于IEEE 802.11设计,由测试、验证机制实现多无人机间分散传导数据的融合与控制[58]。
美国哈佛大学(Harvard University)针对大量mini型、微型无人机群开发了一种开源的仿真试验平台——微型航空器群试验(Simbeeotic)[59],能够模拟无人机群的移动和机群间的通信,可支持快速原形、纯仿真、半实物仿真实验。
国内国防科技大学[60]开发了基于HLA的无人机自组网仿真平台,利用HLA分布式互操作、可重用构建等优势,有效满足网络协议的开发需求。
5 存在的问题和挑战
无人机自组网可对多无人机系统应用提供有效通信保障,为拓展无人机应用起到了基础支撑作用。采用自组网结构能确保网络运行的灵活性和顽健性,但在下一步面向实用化的过程中也就带来了诸多问题和挑战,值得进一步深入研究。
(1)运行规章和任务执行层面
运行规章是无人机安全运行的基础。目前无人机还不具备足够的安全等级,只能局限在预先批准、规划好的隔离空域内运行,这就限制了无人机的多样化应用。随着无人机应用需求的不断拓展和技术水平的深化提高,未来如何将无人机纳入一体化空域管理改革、制定相适应但又有特殊性的运行规章都是无人机自组网发展的前提背景。
无人机自组网运用的本质目的是,为多无人机系统的任务执行能够建立起有效的协调和协作机制提供通信手段保障。面对任务区域范围广阔和无人机数目众多的情况,如何在多无人机之间构建起高效的任务(包括路径)规划分配机制,将直接影响无人机自组网应用效能的发挥。
(2)与其他通信方式的互联互通
无人机自组网并不是孤立存在、应用的,而是作为无人机通信体系结构中的一个重要组成部分,只有保证与其他部分的互联互通、高效协同才能更好地完成任务。首先,无人机必须要与有人驾驶飞机加强通信协作,执行实时回传侦查视频图像、实施电子干扰等不同任务;其次,要确保与卫星、地面网络、其他平台之间的互联互通,便于快速形成统一的战场态势,增强无人机的作战效能。
(3)组网技术层面
由于无人机节点的高速移动造成了网络拓扑高动态变化、链路质量频繁波动,这都对组网技术提出了更高的要求和挑战,其中最主要的将是MAC协议和路由协议的设计问题。MAC层需要高效协调多节点共享有限频谱,克服高速移动、远距离传输造成的不利影响;网络层要能适应拓扑剧烈变化,建立安全可靠的路由机制。这对于有效支持无人机多样化任务中不同类型业务的不同传输需求起到了关键作用,确保在高移动性的动态结构中各类业务的不同QoS需求都能得到保证。
目前无人机的类型多样,通行手段各异。在未来自组网的研究发展中,需要将组网技术的标准化作为一项重要的前期规划内容,便于未来不同类型无人机构成的自组网结构的实践化应用。
6 结束语
作为未来无人机网络通信的发展方向,无人机自组网具有广阔的研究和应用前景,其中MAC协议和路由协议的设计将会是无人机自组网面临的最大挑战。MAC层所面临的问题包括突发业务高速率和低时延传输、多优先级支持、信道高效利用和差错控制等;网络层设计的重点在于如何依据现有MANET路由协议建立起能适应拓扑高动态变化、完全分布式、高效可靠的路由协议。此外,由于运行特性和网络特征的相似性,航空自组网的相关研究对无人机自组网也具有一定的参考价值。无人机自组网的最终目标是依据不同应用建立起相应的通信标准协议,使无人机之间以及与其他通信设施之间实现可靠、高效通信。
参考文献
1 DoD.U S Army Roadmap for Unmanned Aircraft Systems 2010-2035,2010
2 DoD.Unmanned Systems Integrated Roadmap FY2013-2038,2013
3 Li Y,St-Hilaire M,Kunz T.Improving routing in networks of UAVs via scoped flooding and mobility prediction.Proceedings of IFIP Wireless Days,Dublin,Ireland,2012
4 Shirani R,St-Hilaire M,Kunz T,et al.Combined reactive-geographic routing for unmanned aeronautical Ad Hoc networks.Proceedings of 8th International Wireless Communications and Mobile Computing Conference(IWCMC-2012),Limassol,Cyprus,2012
5 Kuiper E,Nadjm-Tehrani S.Mobility models for UAV group reconnaissance applications. Proceedings of International Conference on Wireless and Mobile Communications,Wuhan,China,2006
6 Wang W,Guan X,Wang B,et al.A novel mobility model based on semi-random circular movement in mobile Ad Hoc networks.Information Science,2010,180(3):399~413
7 Biomo J-D,Kunz T,St-Hilaire M.An enhanced Gauss-Markov mobility model for simulations of unmanned aerial Ad Hoc networks.Proceedings of 7th Wireless and Mobile Networking Conference,Vilamoura,2014
8 Han Z,Swindlehurst A L,Liu K J R.Optimization of MANET connectivity via smart deployment/movement of unmanned air vehicle.IEEE Transactions on Vehicular Technology,2009,58(6):3533~3546
9 Brown T X,Argrow B,Dixon C,et al.Ad Hoc UAV ground network(AUGNet).Proceedings of USENIX Technical Conference,Chicago,USA,2004
10 Patibandla S T,Bakker T,Klenke R H.Initial evaluation of an IEEE 802.11s-based mobile Ad Hoc network for collaborative unmanned aerial vehicles.Proceedings of IEEE International Conference on Connected Vehicles and Expo(ICCVE),Las Vegas,NV,2013
11 Li J,Zhou Y F,Lamont L,et al.Packet delay in UAV wireless networks under non-saturated traffic and channel fading conditions.Wireless Pers Commun,2013,72(2):1105~1123
12 Cai Y G,Yu F R,Li J,et al.Medium access control for unmanned aerial vehicle(UAV)Ad Hoc networks with full-duplex radios and multipacket reception capability.Journal Wireless Networks,2013,19(6):1469~1484
13 Li J,Zhou Y F,Lamont L,et al.A token circulation scheme for code assignment and cooperative transmission scheduling in CDMA-based UAV Ad Hoc network.Journal Wireless Networks,2013,19(6):1469~1484
14 韩海艳,马林华,田雨等.无人机编队中的自主定位与动态TDMA协议应用.电光与控制,2012,19(9):29~32
Han H Y,Ma L H,Tian Y,et al.Slef-localization and application of dynamic TDMA in UAV formation.Electronics Optics&Control,2012,19(9):29~32
15 Cheng C M,Hsiao P H,Kung H T,et al.Maximizing throughput of UAV-relaying networks with theload-carry-and-deliver paradigm.Proceedings of IEEE Wireless Communications and Networking Conference(WCNC),Hong Kong,China,2007
16 Jong De E.Flexible data-centric UAV platform eases mission adaptation.http://www.rti.com/whitepapers/RTI-Data-Driven-Approach-to-UAV.pdf,2013
17 Bellur B R,Lewis M G,Templin F L.An Ad Hoc network for teamsofautonomousvehicles.Proceedings of1stAnnual Symposium on Autonomous Intelligence Networks and Systems,Los Angeles,USA,2002
18 Alshabtat A I,Dong L,Li J,et al.Low latency routing algorithm for unmanned aerial vehicles Ad Hoc networks.International Journal of Electrical and Computer Engineering,2010,6(1):48~54
19 Rosati S,Kruzelecki K,Traynard L,et al.Speed-aware routing for UAVAdHocnetworks.ProceedingsofGLOBECOM,Atlanta,GA,2013
20 张可,张伟,李炜等.无人机自组织网络先应式路由协议适应性研究.计算机工程与应用,2010,46(2):4~6
Zhang K,Zhang W,Li W,et al.Research of applicability for UAV Ad Hoc networks pre-active routing protocols.Computer Engineering and Applications,2010,46(2):4~6
21 Zheng Y,Wang Y W,Li Z Z,et al.A mobility and load aware OLSR routing protocol for UAV mobile Ad Hoc networks.Proceedingsof15th IEEE Information and Communication Technologies Conference,Nanjing,China,2014
22 Brown T,Doshi S,Jadhav S,et al.A full scale wireless Ad Hoc network test bed.Proceedings of International Symposium on Advanced Radio Technologies,Boulder,CO,2005
23 Khare V R,Wang F Z,Wu S,et al.Ad-hoc network of unmanned aerial vehicle swarms for search&destroy tasks.Proceedings of International IEEE Conference on Intelligent Systems,Varina,2008
24 李娟,张晓林,占巍等.无人机移动自组网路由协议研究.遥测遥控,2013,34(3):43~47
Li J,Zhang X L,Zhan W,et al.Research on routing protocol in UAV MANET.Journal of Telemetry,Tracking and Command,2013,34(3):43~47
25 Li J,Zhang X L,Bao J H,et al.A novel DSR-based protocol for signal intensive UAV network.Applied Mechanics and Materials,2013,241-244(12):2284~2289
26 Li J,Liu X C,Pang Y F,et al.A novel DSR-based protocol for small reconnaissance UAV Ad Hoc network.Applied Mechanics and Materials,2014,568-570(7):1272~1277
27 Forsmann J H,Hiromoto R E,Svoboda J.A time-slotted on-demand routing protocol for mobile Ad Hoc unmanned vehicle systems.SPIE 6561,2007
28 Biomo J-D M M,Kunz T,St-Hilaire M.Routing in unmanned aerial Ad Hoc networks:introducing a route reliability criterion.Proceedingsof7th IEEE Wirelessand MobileNetworking Conference,Vilamoura,Algarve,Portugal,2014
29 王顶,赵颐轩,马娟.无人机网络环境下AODV协议的优化.计算机测量与控制,2013,21(6):1580~1583
Wang D,Zhao Y X,Ma J.Optimization of AODV routing protocol for UAV network.Computer Measurement&Control,2013,21(6):1580~1583
30 Kesheng L,Jun Z,Tao Z.The clustering algorithm of UAV networking in near-space.Proceedings of8th International Symposium on Antennas,Propagation and EM Theory,Kunming,China,2008
31 Zang C,Zang S.Mobility prediction clustering algorithm for UAV networking.Proceedings of GLOBALCOM,Houston,TX,2011
32 Zhai Z Q,Du J,Ren Y.The application and improvement of temporally ordered routing algorithm in swarm network with unmanned aerialvehicle nodes.Proceedingsof9th IEEE International Conference on Wireless and Mobile Communications,Nice,France,2013
33 Hyland M T,Mullins B E,Baldwin R O,et al.Simulation based performance evaluation of mobile Ad Hoc routing protocols in a swarm ofunmanned aerialvehicles.Proceedings of 21st International Conference on Advanced Information Networking and Applications Workshops,IEEE Computer Society,Niagara Falls,Ont,2007
34 Shirani R,St-Hilaire M,Kunz T,et al.The performance of greedy geographic forwarding in unmanned aeronauticalAd Hoc networks.Proceedings of 9th Annual Communication Networks and Services Research Conference,IEEE Computer Society,Ottawa,2011
35 Lin L,Sun Q,Li J,et al.A novel geographic position mobility oriented routing strategy for UAVs.Journal of Computational Information Systems,2012,56(8):709~716
36 Biomo Jean-Daniel, Kunz T, St-Hilaire M. Routing in unmanned aerial Ad Hoc networks:a recovery strategy for greedy geographic forwarding failure.ProceedingsofIEEE WCNC’14 Track 3(Mobile and Wireless Networks),Istanbul,Turkey,2014
37 石祥滨,王锋.无人机自组网络多媒体数据传输路由算法研究.沈阳航空航天大学学报,2012,29(2):32~36
Shi X B,Wang F.A routing algorithm for UAV Ad Hoc networks multimedia data transmission.Journal of Shenyang Aerospace University,2012,29(2):32~36
38 Elston J,Argrow B,Houston A,et al.Distributed atmospheric sensing using small UAS and doppler radar.Proceedings of AIAA Infotech@Aerospace Conference,Seattle,WA,2009
39 Network Environmental Committee. JAUS/SDP transport specification.http://standards.sae.org/as5669a/,2013
40 Frazzetta S,Pacino M.A STANAG 4586 oriented approach to UAS navigation.J Intell Robot Syst,2013,69(6):21~31
41 Alshbatat A I,Dong L.Cross-layer design for mobile ad-hoc unmanned aerial vehicle communication networks.Proceedings of International Conference on Networking Sensing and Control,Chicago,IL,2010
42 Huba W,Shenoy N.Airborne surveillance networkswith directional antennas.Proceedings of 8th International Conference on Networking and Services,Maarten,2012
43 张三峰,黄迪,陈州等.一种面向机会网络路由的最优停止决策方法.软件学报,2014,25(6):1291~1300
Zhang S F,Huang D,Chen Z,et al.Optimal stopping decision method for routing of opportunistic networks.Journal of Software,2014,25(6):1291~1300
44 Zhao Z L,Ros ario D,Braun T,et al.Topology and link quality-aware geographical opportunistic routing in wireless Ad Hoc Networks.Proceedings of 9th IEEE Wireless Communications and Mobile Computing Conference,Sardinia,Italy,2013
45 Rosário D,Zhao Z L,Santos A,et al.A beaconless opportunistic routing based on a cross-layer approach for efficient video dissemination in mobile multimedia IoT applications.Computer Communications,2014,45(6):21~31
46 Ros ario D,Zhao Z L,Braun T,et al.Opportunistic routing for multi-flow video dissemination over flying Ad Hoc networks.Proceedings of 15th a World of Wireless,Mobile and Multimedia Networks,Sydney,Australia,2014
47 Xu C,Zhang X L.A routing algorithm forschismatic communication network based on UAV.Proceedings of 4th IEEE Electronics Information and Emergency Communication,Beijing,China,2013
48 Brown T X,Doshi S,Jadhav S,et al.Test bed for a wireless network on small UAVs.Proceedings of AIAA 3rd‘Unmanned Unlimited’Technical Conference,Chicago,USA,2004
49 Robotics B.BEAR:berkeley aerobot team.http://robotics.eecs.berkeley.edu/bear/index.html,2013
50 Cameron S,Hailes S,Julier S,et al.SUAAVE:combining aerial robots and wireless networking.Proceedings of 25th Bristol International UAV Systems Conference,UK,2010
51 Johnson E.Georgia tech UAV research facility.http://controls.ae.gatech.edu/wiki/UAV-Research-Facility,2013
52 Christmann H,Johnson E N.Design and implementation of a self-configuring Ad Hoc network for unmanned aerial systems.Proceedings of AIAA 2007 Conference and Exhibit,Rohnert Park,SUA,2007:7~10
53 Ji X Y,Wu S T,Liu X,et al.Research and design on physical multi-UAV system for verification of autonomous formation and cooperative guidance. Proceedings of 2010 International Conference on Electrical and Control Engineering,Wuhan,China,2010
54 陈旿,孙凯将,张力等.无人机自组网系统设计与实现.西北工业大学学报,2009,27(6):854~858
Chen W,Sun K J,Zhang L,et al.Design and implementing self-organized unmanned aerial vehicle (UAV)Ad Hoc network.Journal of Northwestern Polytechnical University,2009,27(6):854~858
55 How J P,Bethke B,Frank A,et al.Real-time indoor autonomous vehicle test environment.IEEE Control Systems Magazine,2008,28(2):51~64
56 Michael N,Mellinger D,Lindsey Q,et al.The GRASP multiple micro-UAV testbed.IEEE Robotics& Automation Magazine,2010,17(3):56~65
57 Goktog an A H,Nettleton E,Ridley M,et al.Real time multi-UAV simulator.Proceedings of International Conference on Robotics and Automation,Vok,2003
58 Goktogan A H,Sukkarieh S.Distributed simulation and middleware for networked UAS.Journal of Intelligent&Robotics Systems,2009,54(3):331~357
59 Kate B,Waterman J,Dantu K,et al.Simbeeotic:a simulator and testbed for micro-aerial vehicle swarm experiments.Proceedings of 11th International Conference on Information Processing in Sensor Networks,Beijing,China,2012
60 苏炯铭,梁加红,陈凌等.基于HLA的MANET网络仿真与应用研究.计算机仿真,2010,27(11):106~110
Su J M,Liang J H,Chen L,et al.Research on simulation and application of MANET based on HLA.Computer Simulation,2010,27(11):106~110
