海洋重力场空间特征描述方法研究
2015-12-31陈晶闫利
陈晶,闫利
(1 海军装备研究院,北京 100161;2 武汉大学测绘学院,武汉 430079)
0 引言
重力匹配地位技术是为实现载体惯性导航系统水下校准,减小惯导系统校准对外部信息的依赖而提出的一项技术。重力匹配定位技术最早由美国提出,是美国海军十分关注的关键技术之一。有文献报道,美国海军曾于1998年和1999年分别在水面舰船和潜艇对重力匹配定位技术进行了演示验证。试验表明,采用重力图形匹配技术,可将导航系统的经度误差和纬度误差降低至导航系统标称误差的10%。
重力匹配技术的实现,需要解决高精度海洋重力基准数据库、高精度的海洋重力传感器以及重力匹配定位算法等三项关键技术,三者缺一不可。重力匹配定位技术的实施,只有在重力特征明显的海域才能进行。因此,进行匹配定位时,首先需要在广阔的海域中选择重力特征较显著的、独特的、容易定位的海域作为可匹配区域,并以此为基础对载体航迹进行规划设计。这就需要对事先得到的海洋重力基准数据库进行有效的分析和处理,挑选出导航用重力场基准数据库中的稳定匹配区域[2]。目前,关于地形图形匹配辅助飞行器导航的选取特征区域的文献研究较多,但是关于重力场特征定量描述的文献较少。为此,本文从重力场特征分析的角度出发,提出了四个用于描述重力场空间特征的指标,并通过仿真试验,验证了提出的指标用于选择重力匹配区域时的可行性。
1 重力场空间特征描述方法
重力场是由地球本身质体密度分布决定的保守力场,其结构在相当长的时间尺度上可以认为保持不变。一直以来,对于重力场的描述都用重力异常或重力梯度的起伏变化大小描述。这种描述方法仅能反映出重力场本身的变化,不能定量表达重力场的空间地理特征。为此,本文提出用粗糙度、相关峰尖锐性、可跟踪度、特征密度等指标,用于表征重力场的空间特征。
1.1 粗糙度指标
重力场粗糙度用来描述一个单元内重力场变化的复杂程度。重力场粗糙度的值小,表示格网点间重力值变化小,区域较平滑;粗糙度的值大,表示相邻格网点间变化与整个基准图相比起伏较大,此时区域特征突出,有利于重力匹配。
1.2 相关峰尖锐性指标
该指标用于度量基准图上某点的相关曲面的相关峰尖锐程度。相关曲面的相关峰越尖锐,则峰顶的曲率越大,表明以该点为中心的某一邻域的重力特征越明显,实际进行目标跟踪计算时,失配的可能性就越小。
1.3 可跟踪度指标
可跟踪度指标是一种用于度量重力基准图中特征显著性的指标。它反应了点所在选定区域的纹理特征,以及在匹配跟踪时,选定区域的抗噪性和稳定性。可跟踪度值大,表明该区域处于基准图较强噪声区域,这样的区域跟踪计算时较稳定;而可跟踪度值小时,区域常位于重力值缓变的区域,这样的区域不利于跟踪。
1.4 特征密度指标
在重力基准图数据库中进行匹配时,边缘或角点等特征分布密度较大的区域,要比那些特征分布密度较小的区域稳定。因此,可以将区域的特征密度作为局部匹配稳健性指标之一。
2 重力场特征指标的计算方法
2.1 重力场粗糙度
设重力基准图上某点(i,j)的重力值为G(i,j),其中,i=1,2,…,m,j=1,2,…,n,全图标准差计算公式为[3]:

其中,mG为全图均值:

标准差σG反映了基准图重力值元素的离散程度和整个重力场的起伏程度。设某一单元内以点P为中心的绝对值粗糙度σP为:

式(3)中粗糙度σP反映了以P点为中心的一个定义的区域内重力场光滑程度,表示重力场局部起伏程度。RP定义为重力场粗糙度。
2.2 相关峰尖锐性
首先,选取基准图上的以点P(i,j)为中心,边长为d的正方形邻域δd(P)为模板,在以点P为中心,边长为DP的一个区域(称为参数有效计算区域)内,利用相关系数进行相关匹配,计算正方形邻域δd(P)中每点P(i,j)相对参数有效计算区域DP的相关曲面。
2.3 可跟踪度
设D(P)是基准图中以点P为中心的格网窗口,ω(P)是一个加权函数,通常取ω(P)=1或者高斯函数,设gx(P)和gy(P)分别是G(P)在X和Y方向的偏导数,则点P的特征矩阵为:
其中,
求特征矩阵Z的特征值λ1,λ2,定义可跟踪度指标Tr(P)=min(λ1,λ2)。
2.4 特征密度
采用边缘检测算法,对匹配区域进行边缘提取,并二值化;计算以某点P为中心的局部区域的边缘点数目和区域总点数之比,作为特征密度指标。
按照上述给出的定义和计算方法,利用局部海域分辨率为1′×1 ′的重力场基准图数据库,分别计算了该区域的四个重力场空间特征指标,结果如图 1所示。
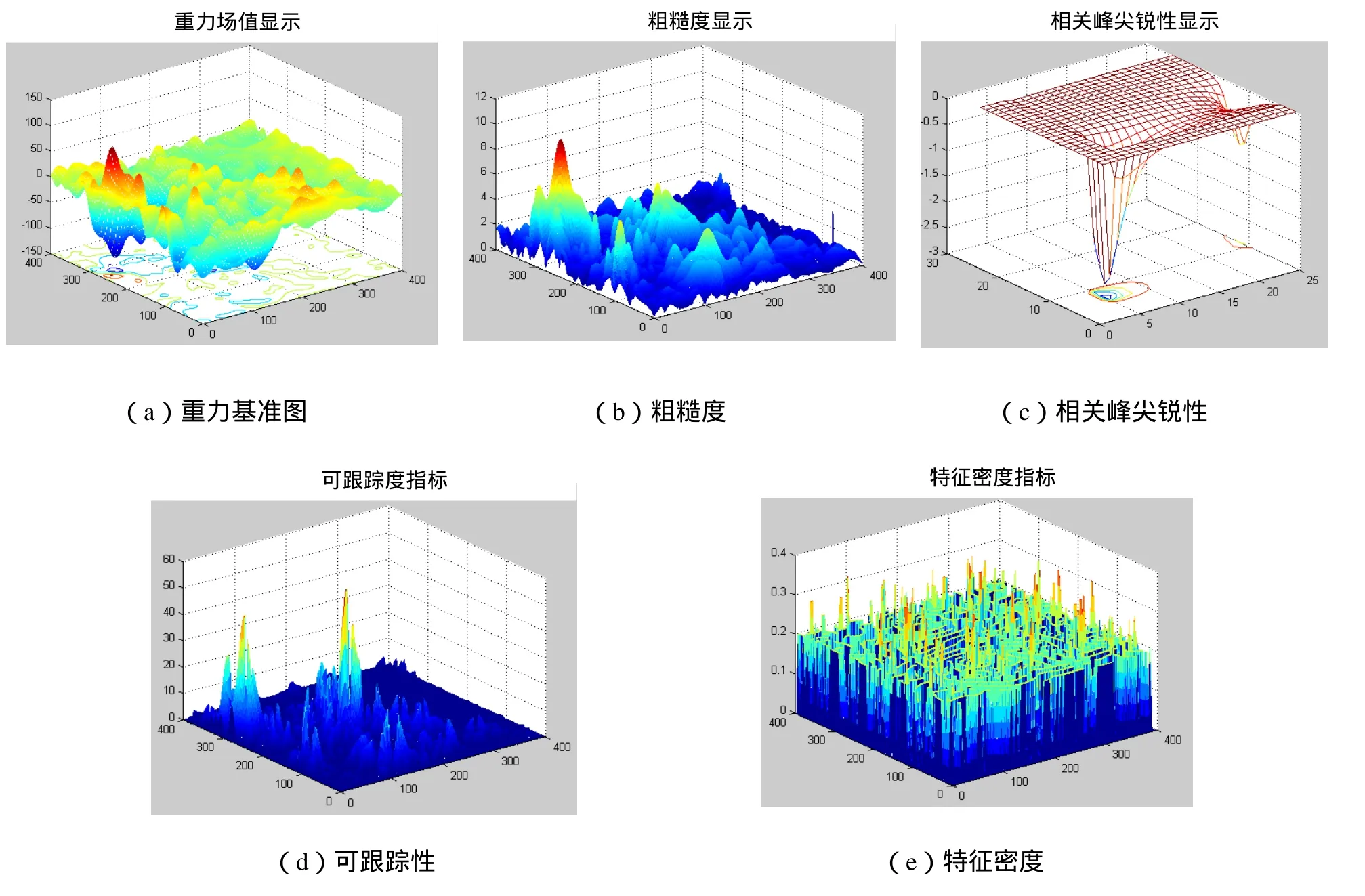
图1 局部海域重力场空间特征指标计算结果示意图
计算结果表明,图1(a)为采用的某区域重力基准图,大部分区域重力值起伏不大,部分重力值起伏较大区域直观上看应属于重力可匹配区的首选区域;图1(b)为计算的重力基准图每点粗糙度值,可看出粗糙度的总体变化趋势与原重力值基本保持一致,表明粗糙度的计算方法较好地反映了原区域重力场的特征,也就是说可以依据重力场粗糙度为标准来初步选择重力场可匹配区;图1(c)为计算的重力基准图每点相关峰尖锐度值。从图中可以看出,变化比较突出的区域应是可匹配区域;图1(d)为重力基准图每点可跟踪度值,可以看出与原重力值吻合度一般,表明不能采用该单一指标选择可匹配区域,还应综合采用其它指标;图1(e)为重力基准图每点特征密度值,可以看出用该指标表示的重力场特征具有多值性,表明不能直接采用该指标选择可匹配区域。
3 可匹配区域选取仿真试验
为了验证粗糙度、相关性、可跟踪度和特征密度等指标在选择重力场可匹配区域时的可用性,本文通过对各个特征指标设定合适阈值[4]的方法,对上述指标进行相对于重力场基准图的归一化处理,每个指标赋予等权,计算重力场空间特征置信度,根据置信度值的大小将重力场特征区域分为由高到低不同档次。计算重力场空间特征置信度后,对计算结果进行分割,提取空间特征置信度较大区域的边缘线,再利用等值线技术提取重力场特征明显区域。
按照上述流程,选择置信度值大的两个试验海区,采用较成熟的TERCOM算法进行重力匹配水下辅助导航仿真实验。试验中按照载体初始位置经度误差2海里,纬度误差2海里,重力图分辨率为1′ ×1 ′ ,惯性导航系统陀螺漂移误差设为0.003°/h,重力仪误差为1 mgal,重力图误差分别为2mgal和3 mgal等仿真条件进行。仿真实验结果如表1所示。
图2 试验海区1重力异常等值线图

图3 试验海区2重力异常等值线图
表1 试验结果表
4 结论
从仿真结果可以看出,提出的重力场描述指标可以对原始重力场基准图中隐含的空间特征进行定量表示,并从不同角度刻画重力场局部区域特征的丰富程度。
实验结果表明,在置信度值大的区域进行重力匹配实验时,匹配后误差大幅下降,说明以特征指标为基础提取的可匹配区域可以认为是重力场基准图特征丰富区域,在这些区域有利于重力匹配定位技术的实施。同时,利用特征指标提取可匹配区域,有效解决了重力基准图数据量大、相似性区域多的问题,提高了匹配速度和系统可用性。
[1]李俊,杨新等.一种选择适配区的算法[J].数据采集与处理,2000,15(4):495-499.
[2]付文兴,王建民,金善良.一种实用的景象匹配区选择方法[J].宇航学报,2003,24(4):348-353.
[3]Xiao Yujun,Ding Minyue,Zhou Chenping.Matching suitability analysis of reference map for scene matching based navigation//Proceedings of SPIE[C].Bellingham:SPIE,1998:100-103.
[4]Hall,E.L.,Rouge,Lt.J.Hierarchical Search for Image Matching [J].Web Information Retrieval and Integration,2005,31(4):46-53.