无人飞艇低空航测系统自动建模技术研究
2015-12-26潘宝玉,刘同文,苏国中等
引文格式: 潘宝玉,刘同文,苏国中,等. 无人飞艇低空航测系统自动建模技术研究[J].测绘通报,2015(4):75-77.DOI:10.13474/j.cnki.11-2246.2015.0115
无人飞艇低空航测系统自动建模技术研究
潘宝玉1,刘同文1,苏国中2,张兰1
(1. 山东省地质测绘院,山东 济南 250002; 2. 中国测绘科学研究院,北京 100039)
Research on Automatic Modeling by Unmanned Airship
Low-altitude Aerial System
PAN Baoyu,LIU Tongwen,SU Guozhong,ZHANG Lan
摘要:探讨了基于无人飞艇载四组合宽角相机低空航测系统的城市三维自动建模技术,实现了一次飞行同时获取城市建筑物4个侧面和顶面的纹理图像,依据组合宽角影像自动提取建筑物高度信息和自动选择最佳纹理图像,基本达到了城市三维建模过程的自动化,大幅度提升了城市三维建模的效率,为智慧城市建设提供了一种全新的技术途径。
关键词:无人飞艇;组合宽角相机;高度获取;纹理贴图;三维模型
中图分类号:P23
收稿日期:2014-05-13
作者简介:潘宝玉(1957—),男,教授级高级工程师,主要从事3S技术应用研究及测绘技术管理工作。E-mail:panbaoyu@126.com
一、引言
城市三维模型的构建是智慧城市的主要内容,智慧城市的建设需要真实的城市三维模型和纹理信息。目前,建设城市三维模型常用的数据源有固定轨道的卫星遥感影像、中高空航天航空影像、低空航摄影像以及车载三维激光扫描仪获取的三维点云数据[1-3]。卫星遥感影像和中高空航空航天影像由于受空间摄影高度和姿态的限制,只能垂直或小角度拍摄,仅能获得城市建筑物顶部纹理信息;车载三维激光扫描仪获取的三维点云数据量巨大,在扫描过程中容易受到树木等街景的遮挡并且不能获取建筑物的顶部数据。上述两种方法在城市建筑物的三维建模中存有一定的局限性。
近年来,随着无人机(unmanned aerial vehicle,UAV)的快速兴起,无人机航摄系统已被广泛用于城市建筑物的三维建模。然而,大多数无人机都是携载一个相机或双拼组合相机,飞行摄影效率不高,不能完全获取建筑物侧面的纹理信息[4]。本文主要介绍无人飞艇载四组合宽角相机低空航测系统,利用无人飞艇摄影测量系统的倾斜摄影方式,对城市建筑物进行多角度、低空摄影测量,获取建筑物侧面和顶部影像,实现建筑物高度信息的自动提取和最佳纹理图像的自动选择,实现经济高效的城市三维建模生产模式。
二、基于四相机重叠影像自检校的低空航测系统
本文提出的无人飞艇低空航测系统城市三维自动建模技术路线如图1所示。
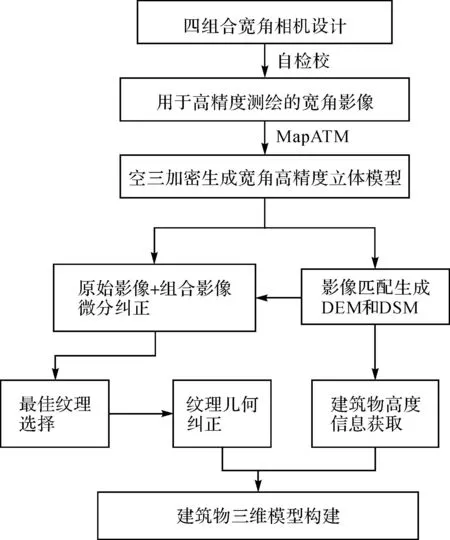
图1 城市三维自动建模技术路线
1. 无人飞艇载四组合宽角相机低空航测系统
为了提高城市三维信息获取的能力和效率,本研究采用近年发展起来的无人飞艇载四组合宽角相机低空航测系统。该系统主要由飞艇主体、四相机组合稳定平台、燃料动力系统、飞行控制器、地面监控部分组成,是迄今为止城市上空最安全的飞行器,为常态化、高效采集城市三维信息提供了技术支撑。
组合宽角相机中4个相机A、B、C、D成对相向倾斜,A、C相机倾角为37.8°,B、D相机倾角为23.8°;A、C相机间距离为0.15m,B、D相机间距离为0.23m。如图2所示。
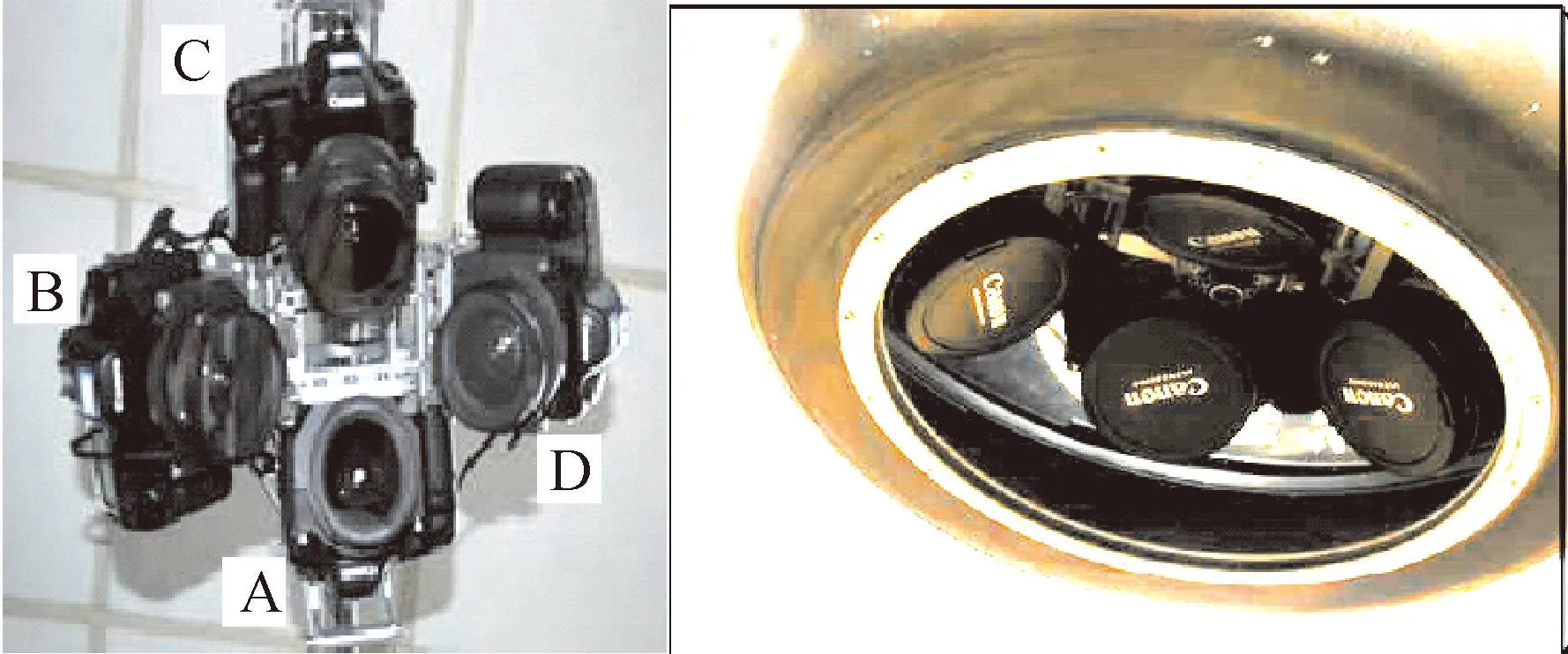
图2 无人飞艇载四组合宽角相机低空航测系统
2. 提高三维立体量测精度的四组合相机自检校技术
相机检校主要是利用高精度的控制点和共线方程,基于最小二乘平差获取四相机之间的相对外方位元素[5-6]。本文通过采用林宗坚教授发明的运动自检校模型,利用四组合相机成像重叠区域视差变化运动模型实现高精度自检校。如图3所示,利用四相机影像间5个重叠区(AB、AC、AD、BC和CD)内12个标准点位(图中圆点表示),基于影像匹配获取的同名像点建立24个视差方程,其中有12个未知数。按照附有条件的间接平差法求解,即可实现组合相机系统的自检校。
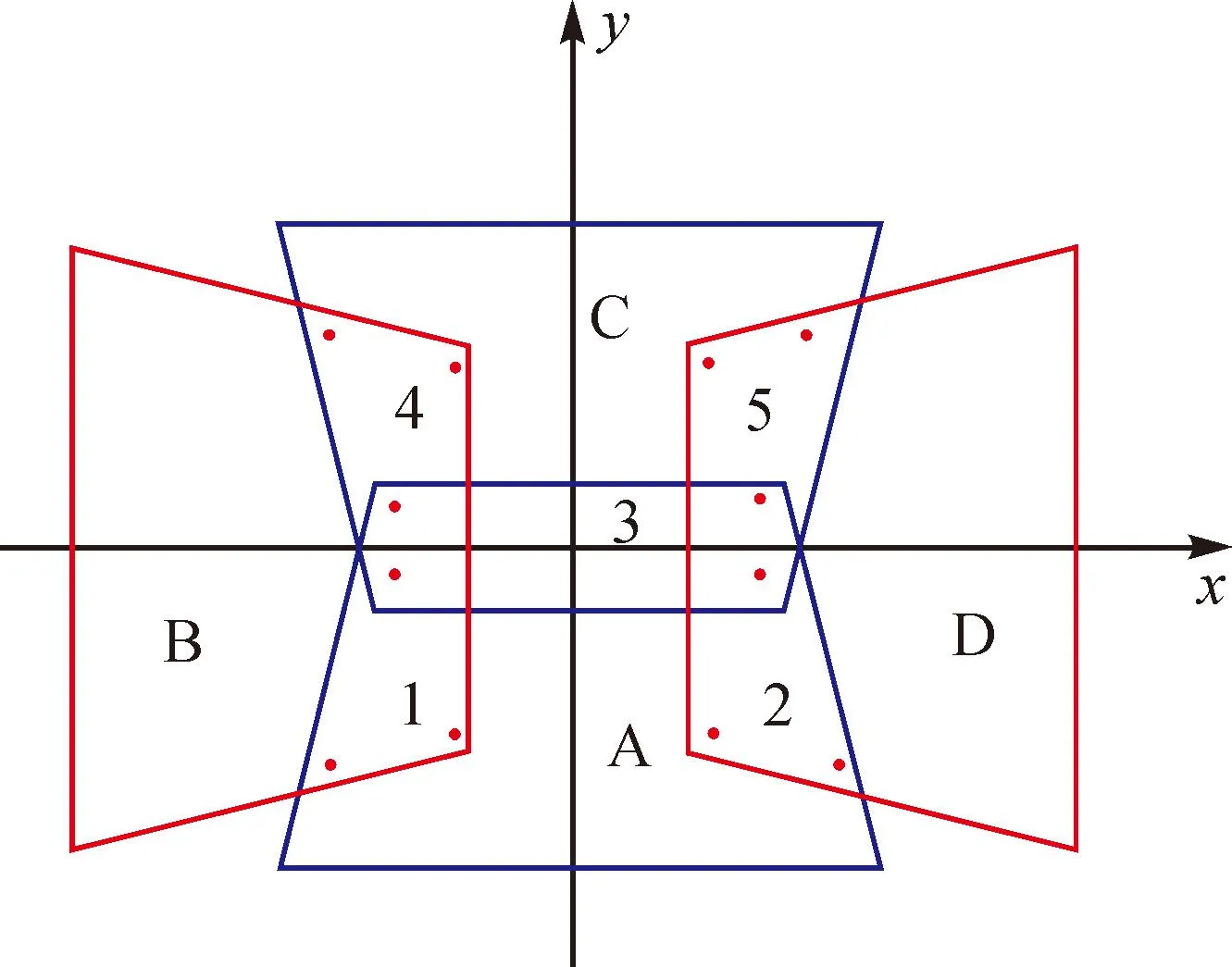
图3 用于自检校的影像重叠区及检测点
由于无人飞艇在飞行过程中受风力、温度和平台运动的影响,组合相机间的相对空间关系是变化的,利用上述自检校方法,每一次曝光获取的单独相机的组合影像都完成一次自检校。
三、建筑物高度信息自动提取
利用组合宽角成像技术获取宽角低空影像,在低空航测MAP-ATM软件的支持下完成宽角影像的“空三加密”。试验表明,依照大比例尺航摄飞行规范要求获得的影像数据所形成的宽角立体模型高程精度在17cm以内[7-9]。在完成对宽角影像空间姿态高精度解算的条件下,采用CMP-MVS技术生成密集的DSM点云数据,再利用自动滤波和少量人工干预生成作业区域DEM模型。在获得这两类数据后,利用城市地籍数据或大比例尺地形图上的建筑物地基数据用比对自动搜索技术自动获得建筑物高度信息。最后,用原始影像结合DSM数据综合分析的办法自动提取建筑物模型(如图4所示)。相对于常规三维建模方式,省去了外业调查和大量人工量测建筑物高度的工作量,使得建模效率大幅度提升。
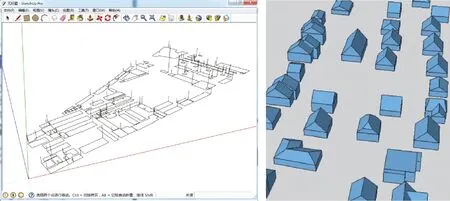
图4 获取建筑物高度示意图
四、最佳纹理图像选择
真实的纹理是构建建筑物精细三维模型所必需的。常规的城市三维建模方法一般是在实地用数码相机拍摄建筑物的4面纹理照片,内业在Photoshop软件中进行纹理照片的裁剪和处理,最后通过人工去贴每个建筑物的纹理照片,工作量十分庞大,工作效率极低。
无人飞艇载四组合宽角相机系统的4个相机倾斜角度超过20°,组合成像生成的宽角影像能解算相机的高精度6姿态数据,由于4个倾斜影像与宽角影像有严格的几何关系模型,因此,通过宽角影像的姿态可以高精度求解倾斜影像的姿态,具有高精度姿态的倾斜影像为三维模型自动纹理映射和挑选提供了技术条件。由于三维建模的航摄飞行通常采用航向大于80%、旁向大于65%的影像重叠模式,因此一个建筑物侧面影像可能存在于20~30幅影像之内,如果依靠人工挑选合适的纹理影像则工作量太大。为此,本研究利用建筑物表面法向方向100m消隐分析和建筑物侧面在影像上分块投影面积较大这两个约束条件选择1~3张最佳纹理影像。
四组合相机影像能够清晰地获取城市建筑物侧面和顶面的影像纹理。如图5所示,采用基于组合相机多视定向影像为建筑物几何模型添加表面纹理的方法,为建筑物几何模型中的每个墙面从组合相机多视影像中选择一幅质量最好、受遮挡影响最小的影像作为纹理图像源,以实现建筑物纹理图像的最佳选择。每个建筑物都会自动选取最佳的4个侧面纹理图像和一个顶部纹理图像。
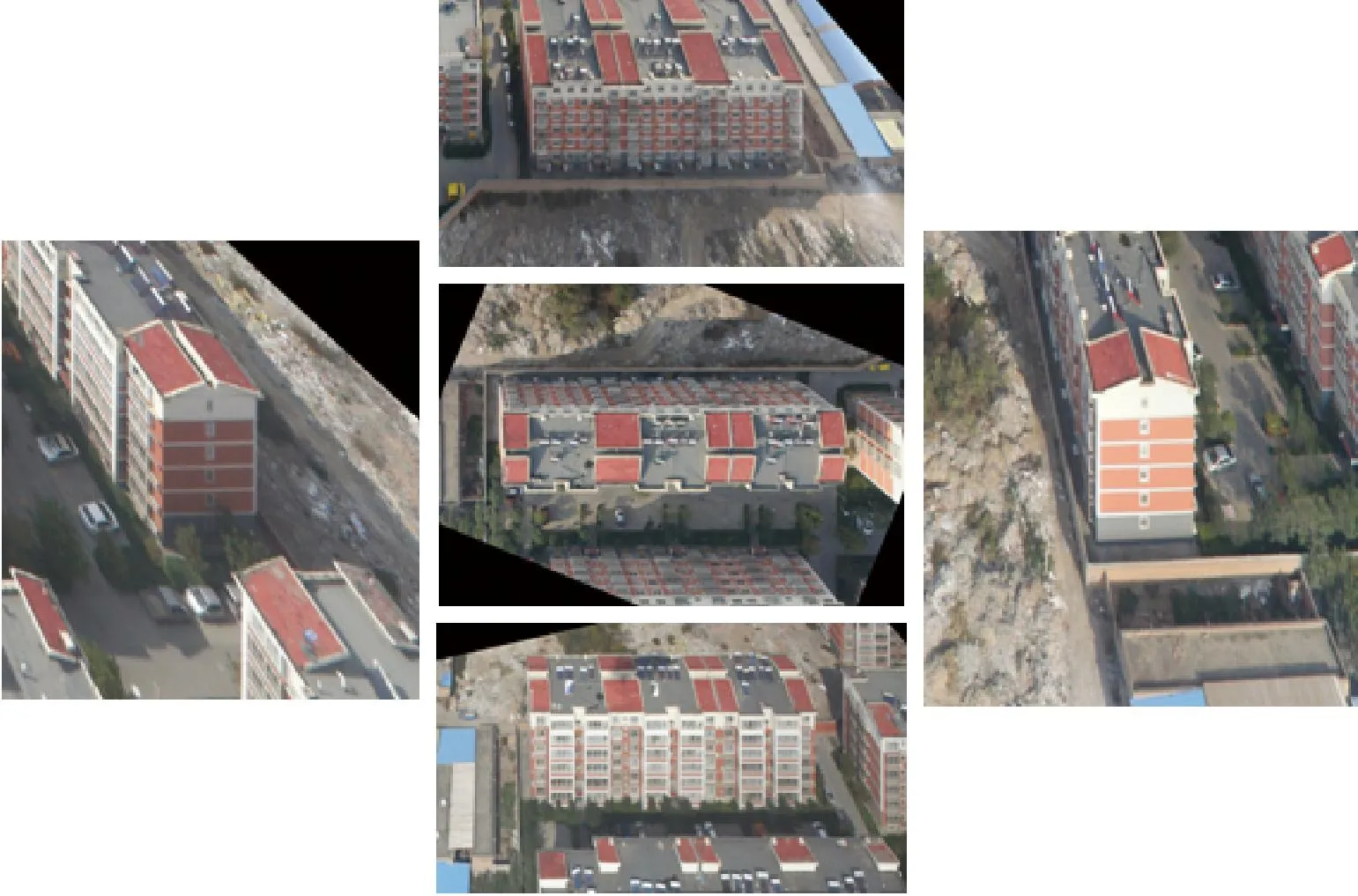
图5 建筑物5个方向的纹理图像
五、三维模型自动构建
从多张有同一建筑物的原始影像中选择出最优的一张作为纹理裁切的影像后,需要对纹理影像作几何纠正,得到建筑物各面的矩形纹理图片。纹理的像素尺寸是2的N次方,贴图长宽比尽量为1∶1或1∶2,如果贴图实在太长或太宽,则将模型面进行分割,分别贴图。建筑物纹理裁切的效果如图6所示。

图6 裁切好的建筑物纹理图像
根据自动获取的建筑物高度信息进行拉伸生成白模,再将裁切好的纹理图像映射到对应的建筑物墙面上,从而获得纹理属性的建筑物三维模型,如图7所示。

图7 建筑物三维模型
六、应用示例
为验证无人飞艇载四组合宽角相机系统自动建模的可靠性,本文以运城市城区23km2为低空摄影测量试验区域,具体试验情况见表1、表2。
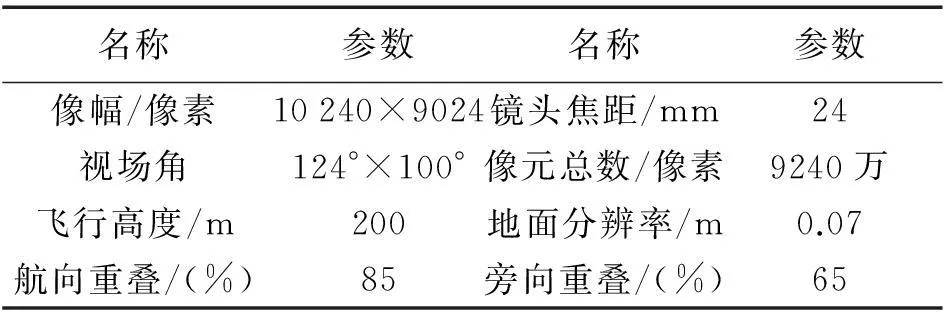
表1 相机和航摄参数
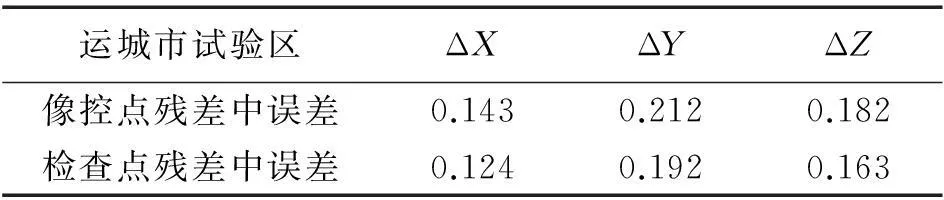
表2 运城市空三加密试验分析 m
试验数据表明,应用无人飞艇载四组合宽角相机低空摄影测量系统进行城市建筑物三维建模,能够满足1∶1000大比例尺地形图的精度要求[10],建立的运城市区三维模型效果如图8所示。

图8 试验区域三维效果图
本次试验不需要人员去现场进行建筑物高度调查,也不需要实地拍摄建筑物每个立面的纹理照片,显著提升了工作效率。运城市城区每平方千米城市三维建模工作量分析对比数据见表3。
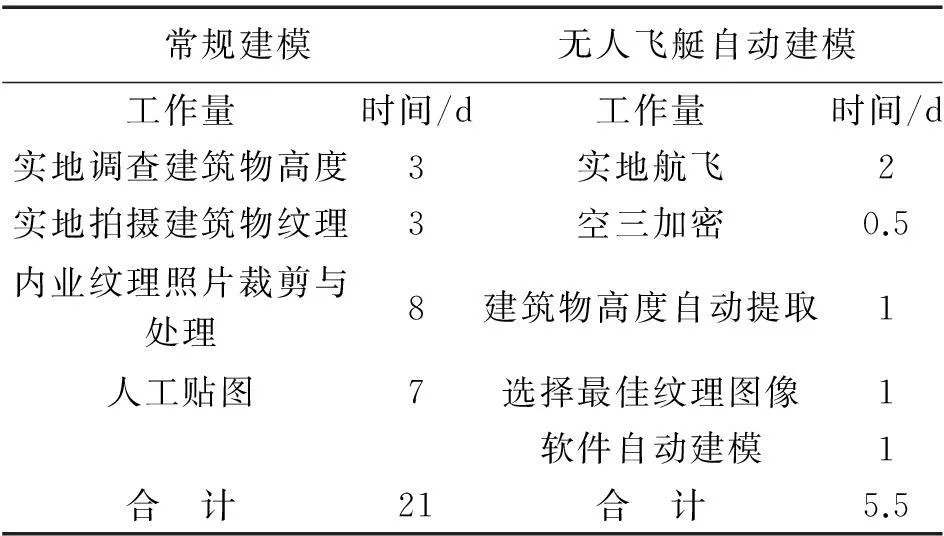
表3 两种建模方式对比表
七、结束语
无人飞艇载四组合宽角相机低空航测系统能够实现一次飞行获取城市建筑物4个侧面和顶面的纹理,基于四相机重叠影像的自检校完成影像拼接,实现了建筑物高度的自动获取和纹理的最佳选择与自动裁切,使建模效率得到大幅度提升。试验结果表明,城市三维建模精度能够满足1∶1000大比例尺测图的精度要求,为智慧城市建设提供了一种新的技术手段。因此,无人飞艇低空航测系统自动建模必将有广阔的应用前景。
参考文献:
[1]李成名,王继周,马照亭. 数字城市三维地理空间框架原理与方法[M]. 北京:科学出版社,2008.
[2]吴军. 三维城市建模中的建筑物墙面纹理快速重建研究[D]. 武汉:武汉大学,2003.
[3]桂德竹,林宗坚,张成成. 倾斜航空影像的城市建筑物三维模型构建研究[J]. 测绘科学,2012,37(4):140-142.
[4]林宗坚,苏国中,支晓栋. 无人机双拼相机低空航测系统[J]. 地理空间信息,2010,8(4):1-3.
[5]刘凤英,王冬. 自稳定双拼相机影像拼接技术[J]. 测绘通报,2012(2):56-58.
[6]王冬,卢秀山,刘凤英,等. 自稳定双拼相机低空无人飞艇航测系统[J]. 遥感应用,2011(4):96-99.
[7]谢建春. 利用无人飞艇获取影像资料制作DOM实践[J]. 山东国土资源,2012,28(7):40-42.
[8]谢建春,潘宝玉,苏国中,等. 一种提高大比例尺航测精度的方法试验研究[J]. 测绘科学, 2013,38(5):5-7.
[9]张兰,潘宝玉. 博兴县无人飞艇低空航摄测量数据处理[J]. 地矿测绘,2012,28(1):29-32.
[10]潘宝玉,肖兴军,刘军,等. 基于无人飞行器开展村庄地籍测量的应用探讨[J]. 地矿测绘,2013,29(2):1-3.
