高速铁路道岔精密测量方法及其精度分析
2015-12-26陈龙,刘成龙,王化光等
引文格式: 陈龙,刘成龙,王化光,等. 高速铁路道岔精密测量方法及其精度分析[J].测绘通报,2015(4):30-33.DOI:10.13474/j.cnki.11-2246.2015.0105
高速铁路道岔精密测量方法及其精度分析
陈龙1,刘成龙1,王化光1,罗远刚2
(1. 西南交通大学地球科学与环境工程学院,四川 成都 610031; 2. 中铁二院工程集团有限
责任公司,四川 成都 610031)
Precision Measurement Method of High Speed Rail Turnout and
Its Precision Analysis
CHEN Long,LIU Chenglong,WANG Huaguang,LUO Yuangang
摘要:介绍了采用全站仪配合轨检仪进行高速铁路道岔精密测量的方法。采用误差传播定律,详细分析了该方法测量道岔区轨道各项参数的精度情况。以某客运专线高速道岔测量试验的数据,证明了本文介绍的方法确实可行,测量精度能够满足高速铁路道岔测量的精度要求,对目前高速铁路道岔测量具有参照价值。
关键词:高速道岔;精密测量;自由设站;极坐标测量;轨检仪
中图分类号:P258
收稿日期:2014-02-08
作者简介:陈龙(1988—),男,硕士生,研究方向为精密工程测量与变形监测。E-mail:373467703@qq.com
一、引言
高速铁路道岔(简称高速道岔)是线路上的重要环节,是影响列车运行速度和安全的关键设备,是高速铁路的重要工程结构及核心建造技术之一[1]。高速道岔铺设技术复杂、现场测量精度要求高,道岔处轨道的平顺性直接决定了列车的运行速度和高铁的安全性、舒适性及耐久性。因此高速道岔的精确测量(简称为精测)与调整工作是高速道岔正常使用的基础。
目前高速道岔的精测在《高速铁路工程测量规范》(简称规范)(TB 10601—2009)中有两种方式[2]:一是全站仪配合水准仪进行道岔精调测量;二是智能型全站仪和轨道几何状态测量仪(简称为轨检仪)相结合的方式进行道岔精调测量。由于高速道岔精测对测量精度要求高,考虑测量的精度和工作的效率,一般采用智能型全站仪和轨道几何状态测量仪相结合的方式进行道岔精调测量。本文具体介绍采用智能型全站仪和轨检仪进行高速道岔精测的方法,并分析该方法的精度。
二、测量方法及其精度分析
1. 测量方法
高速道岔精测的第一步是进行智能型全站仪的自由设站测量[3]。如图1所示,首先在道岔测量区距道岔测量起点约70m处线路中线附近安置全站仪,全站仪整平后对附近8个CPⅢ控制点中的两个点进行半测回的三维测量,全站仪定位和定向后自动测量其余6个CPⅢ控制点,最后根据这8个CPⅢ控制点已知的三维坐标及观测值,进行三维严密平差计算和精度评定。自由设站的精度应满足文献[4]中的要求,见表1。
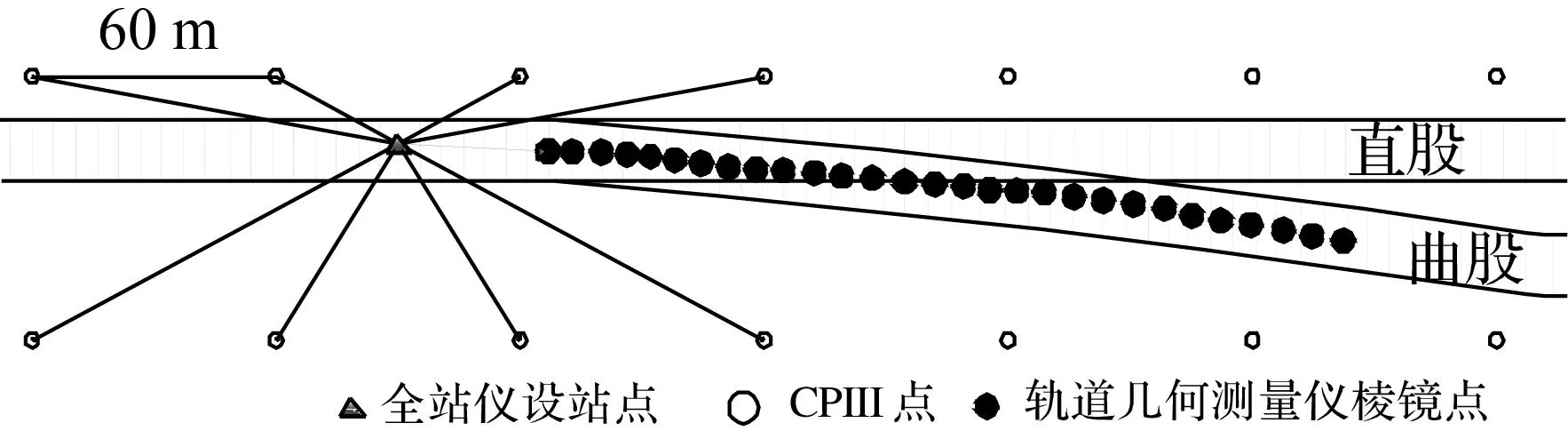
图1 轨检仪轨道测量原理示意图

项目X/mmY/mmH/mm方向/(″)中误差≤0.7≤0.7≤0.7≤1.4
道岔精测的第二步是全站仪配合轨检仪进行道岔轨道现状的测量。全站仪自由设站完成后,即可通过轨检仪进行道岔处轨道线形的测量。如图1所示,轨检仪安置在道岔区的钢轨上,全站仪直接测量轨检仪上棱镜的三维坐标,同时根据轨检仪内部倾角和轨距传感器的测量数据,再结合岔区轨道的设计参数即可获得当前轨检仪所在位置的中线三维坐标、左右轨面三维坐标、轨距和超高等岔区轨道的几何状态参数[5];然后轨检仪朝全站仪方向前移一个扣件间距,测量下一个扣件顶面轨道的几何状态参数,依此类推,直至轨检仪测量到距全站仪约15m的位置,完成本测站的岔区轨道测量,并把轨检仪停留在本测站最后测量的扣件位置上。
道岔测量的第三步是进行下一个测站的岔区轨道测量。全站仪前移到距轨检仪约70m的位置处,按照上述方法设好站后,先对轨检仪停留处的轨道进行轨道搭接测量,并与上一测站轨道测量的结果进行比较,满足要求后再按照前述方法进行第二个测站的岔区轨道测量,直至完成整个道岔区域的轨道测量。
综上,高速道岔的精测原理为:利用智能型全站仪和线路轨道CPⅢ控制网,对轨道几何状态测量仪上的棱镜进行观测并获得该棱镜的三维坐标,再结合线路设计文件、轨检仪倾角传感器及轨距传感器的测量数据,利用相应的平顺性参数计算模型,实时计算轨检仪所处位置的实测三维坐标及其各项平顺性参数。
2. 岔区中线测量精度分析
根据上述道岔精测方法,可以得知全站仪自由设站后对轨检仪上的棱镜三维坐标的获取,实质就是单测站极坐标测量法[6],棱镜点三维坐标的计算模型为
(1)
式中,(X,Y,Z)、(X0,Y0,Z0)分别是轨检仪上棱镜三维坐标和全站仪设站处站心坐标;S、A、α分别是站心到棱镜的斜距、天顶距和方位角观测值。
站心到棱镜方向的方位角计算公式为
α=W+L
(2)
式中,W为全站仪设站处的定向角,即水平度盘零方向的方位角;L为度盘零方向与站心到棱镜间的水平角观测值。
将式(2)带入式(1),并根据误差传播定律得轨检仪上棱镜各坐标分量的中误差为
(3)
式中,mX、mY、mZ分别表示轨检仪上棱镜坐标各方向的中误差;mX0、mY0、mZ0分别表示全站仪设站处站心坐标各方向的中误差;ρ=206265″;mS表示全站仪测距中误差;mA表示全站仪天顶距测量中误差;mW表示定向角中误差;mL表示全站仪水平方向测量中误差。
高速道岔精测采用全站仪盘左位单次极坐标测量,现采用标称精度方向观测中误差为mL、测距固定误差为a和测距比例误差为b的全站仪进行盘左位观测,由全站仪的标称精度计算测距中误差,得
mS=a+b·S
(4)
式中,a单位为mm;b单位为mm/km;S单位为km。

(5)
(6)
建立沿线路方向的高速道岔独立坐标系,则道岔直股部分的中线偏差即为测点实测Y值与该测点设计Y0值的差值。由于在高速道岔精测时全站仪架设高度与轨检仪棱镜高度基本相当,故天顶距观测值A为90°,偏差不超过1°。取全站仪设站精度刚好满足表1要求,即mX0、mY0、mZ0方向的中误差值均为0.7mm,方向中误差为1.4″。将式(4)—式(6)代入式(3),计算出不同标称精度不同距离下极坐标测量的棱镜点坐标精度估值,估算结果见表2。
由表2可以看出,对于同一种仪器而言,随着设站位置与轨检仪初始位置距离的增大,测量得到的道岔中线坐标的各方向中误差呈增大趋势;对于同一设站距离,随着全站仪标称精度的不同,测量得到的道岔中线坐标的各方向中误差亦不同,且标称精度越低中误差越大。在最远距离和全站仪精度配置最低的情况下,棱镜坐标X、Y方向中误差均为1.21mm,取中误差的2倍为允许偏差值,即允许偏差值为2.42mm。规范中要求道岔中线允许偏差小于2mm、岔区轨面高程允许偏差为-5~0mm,因此就需考虑全站仪的精度和自由设站位置距轨检仪的初始位置的距离,以使测量得到的道岔中线坐标的各方向中误差满足规范的要求,且能提高测量效率。考虑到道岔精测时全站仪自由设站的实际精度会优于表2估算时所采用的设站精度,因此在高速道岔实际测量时应选用高精度配置的全站仪,且全站仪设站距离尽可能近。
3. 岔区轨向和高低测量精度分析
轨向是轨道方向的简称,是衡量轨道中心线在水平面上平顺性的指标,曲线上称为正矢;高低是钢轨顶面沿纵向在竖直方向的高低起伏变化量,反映轨道顶面在竖直平面内的不平顺。
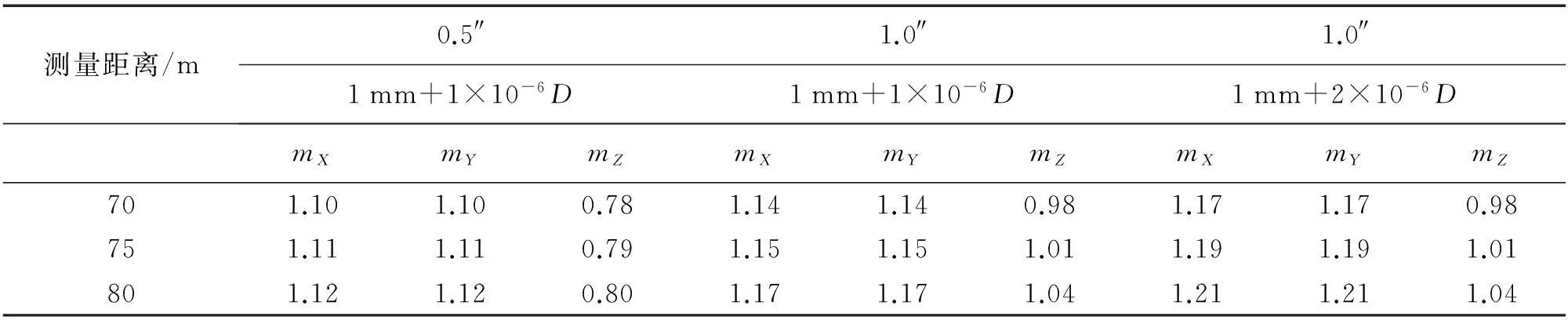
表2 不同标称精度不同距离下的轨检仪棱镜点坐标精度估值 mm
规范中对高速道岔静态平顺性的要求见表3。

表3 高速铁路道岔静态平顺度允许偏差
如图2所示,由轨向和高低的定义可知[7],在道岔纵横向坐标系中轨道上i点10m弦轨向和高低值的计算公式为
(7)
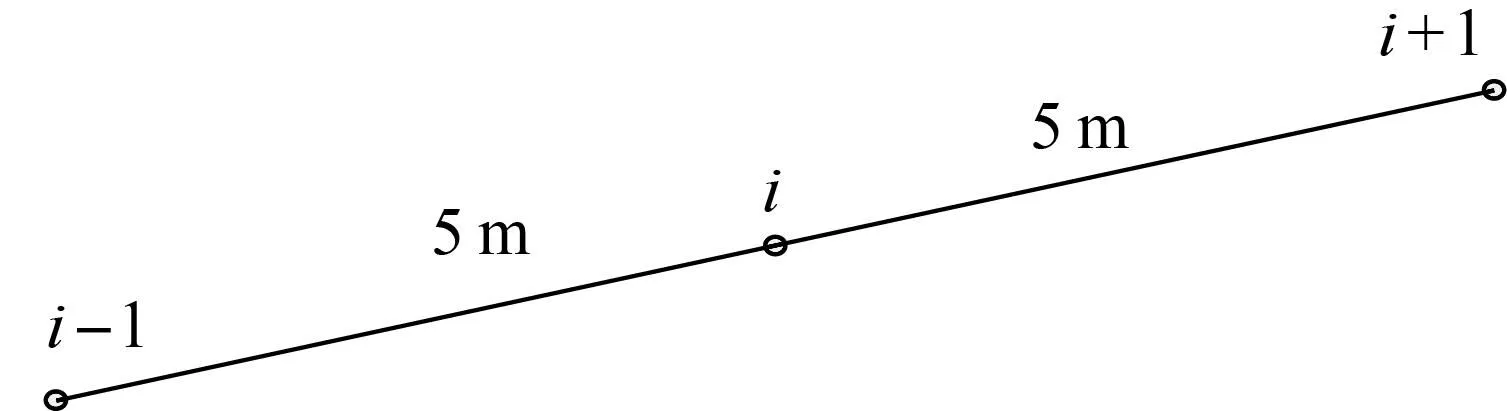
图2 简易轨向和高低计算示意图
式中,ΔhY、ΔhZ分别表示轨道某测点i点处10m弦的轨向和高低值;(Yi,Zi)、(Yi-1,Zi-1)和(Yi+1,Zi+1)分别表示i点及距i点前后各5m弦处其测点在Y和Z方向的测量值。一般情况下图2中的i-1、i和i+1三点的坐标和高程是在同一测站测量的。
现分析岔区轨向和高低测量精度时考虑特殊情况,即设i点与i-1点在同一测站测量,而i+1点在另一测站测量,由于测量时有Ai≈Ai-1≈Ai+1,ai≈ai-1≈ai+1。结合式(1)和式(7),并根据误差传播定律得
(8)
由于道岔精测时设站精度必须满足自由设站的精度要求,即设站点坐标各方向的中误差值均小于0.7mm和定向角未知数的中误差小于1.4″,据此可估算出在不同标称精度和不同距离的条件下道岔测点处轨向和高低的精度,估算结果见表4。

表4 不同标称精度不同距离下轨向和高低的中误差 mm
由表4可以看出,对于同一种仪器而言,随着设站位置距轨检仪初始位置距离的增大,估算得到的道岔轨向和高低的测量精度呈降低的趋势;而对于同一设站距离,随着全站仪标称精度的降低,估算得到的道岔轨向和高低的测量精度也呈降低的趋势。在最远距离和全站仪精度配置最低的情况下,估算得到的轨向和高低的测量中误差分别为1.27mm和0.94mm,取2倍中误差为允许误差,轨向和高低测量的最大误差可分别达到2.54mm和1.88mm,显然轨向的测量精度不满足表3中的相关要求。顾及表4中的估算结果是在取设站精度为最差(刚好满足规范要求)前提下估算出来的,且高速道岔实际测量时的设站精度往往会优于规范中要求的精度,因此在实际测量时若选用全站仪的标称精度不低于1.0″和1mm+1×10-6D,且全站仪距轨检仪的最远距离不超过75m,按照上述方法进行岔区轨道轨向和高低的测量,其精度是能够满足规范要求的。
综上对高速道岔测量方法的介绍及岔区轨道中线坐标、轨向和高低等参数精度的估算可知,在道岔实际测量时,只要选用合理的全站仪和合理的设站距离,按照上述方法测量得到的岔区轨道各项参数的精度是能满足相关规范要求的。
三、实测数据分析
为了验证上述方法的正确性,特在一段标准的高速铁路道岔段进行测量试验。试验选用徕卡TCRA1201+全站仪(标称精度:测角中误差1.0″,测距精度1mm+1.5×10-6D配合SGJ-T-CEC-1型轨检仪进行测量。在高速道岔直股段,全站仪设站距轨检仪初始位置为75m,测站i和i+1设站精度分别为:X0i=0.6mm、Y0i=0.5mm、Z0i=0.6mm,定向角未知数中误差为1.21″,X0i=0.05mm、Y0i=0.5mm、Z0i=0.6mm,定向角未知数中误差为1.32″,达到规范要求;在高速道岔曲股段,全站仪设站距轨检仪初始位置为75m,两次设站精度分别为:X0i=0.6mm、Y0i=0.4mm、Z0i=0.5mm,定向角未知数中误差为1.08″,X0i=0.5mm、Y0i=0.4mm、Z0i=0.5mm,定向角未知数中误差为1.14″,亦达到规范要求。按照上述作业方法分别测量直股段和曲股段数据。随后用专门的数据处理软件对测量得到的原始数据进行处理,统计道岔直股段和曲股段的左右轨坐标精度及其轨向和高低的中误差,统计结果见表5。
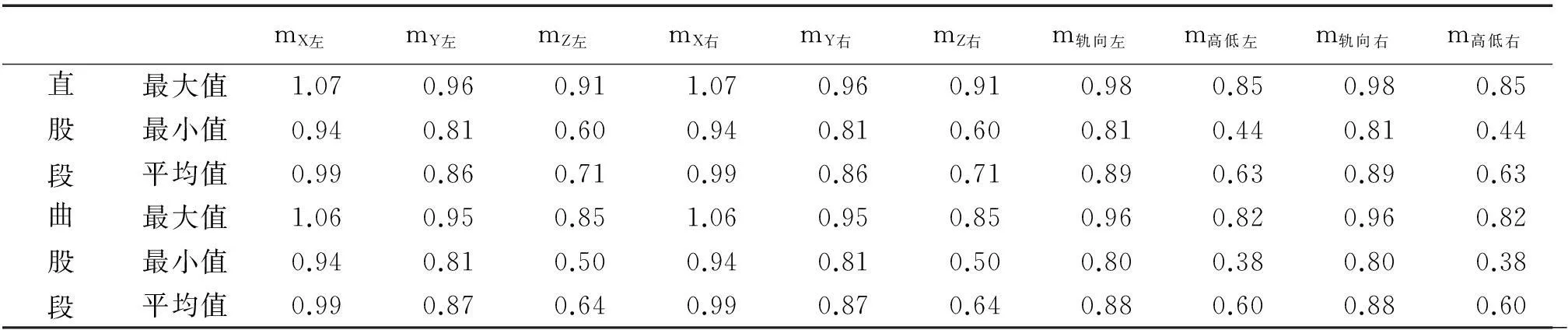
表5 某高速道岔直股段和曲股段中线坐标精度及其轨向、高低中误差统计表 mm
由表5可以看出,直股段和曲股段的轨道中线坐标Y、Z方向中误差均小于1mm,轨向和高低的中误差也小于1mm,并且优于规范中的相关要求。因此试验实测数据也证明按照上述方法进行高速道岔测量,其精度能够满足规范要求。
四、结论
综合上述对智能型全站仪和轨检仪相结合的测量方法在高速道岔精测中应用的介绍、精度的定性和定量分析,以及对实测数据的计算和分析,可得到以下主要结论:
1) 全站仪自由设站精度越高,测量得到的轨道几何状态参数的精度也越高,因此实际测量时应尽可能提高自由设站的精度。
2) 全站仪设站时距轨检仪初始位置的距离对测量结果的精度有影响,距离越远则测量精度越低,距离越近则测量精度越高。
3) 在采用标称精度不低于1.0″,1mm+1.5×10-6D的全站仪配合轨检仪施测,单站所测距离不超过75m的前提下,测量得到的道岔的中线坐标、左右轨坐标、高低及轨向等几何状态参数的精度是完全可以满足规范要求的。
参考文献:
[1]王平.高速铁路道岔设计理论与实践[M].成都:西南交通大学出版社,2011.
[2]中华人民共和国铁道部.TB10601—2009 高速铁路工程测量规范[S].北京:中国铁道出版社,2010.
[3]张忠良,杨友涛,刘成龙.轨道精调中后方交会点三维严密平差方法研究[J].铁道工程学报,2008,5(5):33-36.
[4]中华人民共和国铁道部.铁建设函[2009]674号.高速铁路无砟轨道工程施工精调作业指南[S].北京:中国铁道出版社,2009.
[5]武汉大学测绘学院测量平差学科组.误差理论与测量平差基础[M].武汉:武汉大学出版社,2003.
[6]全顺喜,王平,陈嵘.无砟轨道高低和方向不平顺计算方法研究[J].铁道学报,2012,34(5):81-85.
