一种机器人自主思维方法
2015-12-25邓豪周一廷谢从霜
邓豪, 周一廷, 谢从霜
(西南科技大学 信息工程学院,四川 绵阳621010)
0 引言
1950年,图灵在《心灵》发表论文“计算机器与智力”,给机器思维下了影响深远的定义:“如果自动机能在某些制定的条件下模仿一个人把问题回答得很好,以致在很长一段时间里能够迷惑提出该问题的人,那么这种自动机就可以认为是能够进行思维的”[1]。而现今采用传统人工智能方法设计的机器人存在无法离线学习、任务确定以及智能扩展性差、无法适应多变的环境等多种局限性问题[2]。随着各学科技术的发展,受到认知科学、神经生物学和心理学等学科交叉的启发,研究人员开始着眼于机器人认知这一新的思路解决上述问题与局限[2]。
类人智能一直是人工智能和机器人领域的研究目标。目前,比较成熟的机器人主要是应用在特定环境下,针对于特定任务而特殊设计的机器人。但随着对智能化水平需求的不断提高,越来越需要能在高度复杂环境下工作,执行非特定任务和具有高度自治性的智能机器人[3]。但当工作环境动态多变时,周边环境不完整和不确定的信息会导致机器人在执行任务的过程中遇到困难[4]。而目前对于机器人在完整周边环境信息、任务完成、学习、记忆与遗忘等情况下获得与产生的大数据,已经难以用现有的数据工具进行管理利用[9-10]。但这些大数据是机器人通过信息世界认识现实世界的基础数据和智慧源泉[11],与机器人应用密切相关[12-13]。因此,如何让完善机器人周边信息及对于大数据的获取、处理、存储、读取、利用是当前热点。
本文通过将生物特性与机器人学习机制及遗忘机制联系,利用多信息综合对周边环境进行完善,采用数据降维与稀疏学习的技术完成大数据的处理及信息挖掘,从而提出一种机器人自主思维模型。
1 机器人信息交互
1.1 信息获取
生物在单位时间内与环境交互的信息量是异常庞大的,且信息相对于时间是形式多样、维度多种的。传感器类似人与环境进行信息交互的各种媒介,是机器人与环境进行信息交互的桥梁,但目前各类传感器处理的是相对时间单维、形式单一的信息,且对环境信息的复用性差。这也是机器人只能在特定环境下、机械地完成特定任务,而无法进行自主性思维的一个重要原因。而对于复杂和动态多变的工作环境,周边环境不完整和不确定的信息经常导致机器人在执行任务的过程中遇到困难。故机器人如何更全面地与环境进行信息交互及各类信息融合及复用是目前机器人智能化亟待解决的问题。
1.2 传感器
对于机器人与周边环境进行信息交互,信息量应是各类单一信息的有机结合,为了尽可能完善周边信息,而不是针对特定环境、特定任务的单一信息,机器人与周边环境交互信息量可表示为

Y(t)表示机器人与环境交互的多维信息量,Xi(t)表示各传感器传送至机器人的单一维度信息向量。由式(1)可知,机器人在复杂和动态多变的环境下,所需要的环境信息需要多种传感器共同提供,并且各单一维度信息量相对于时间具有一致性,即同一时刻各类信息有相应的映射关系。机器人进行决策时,同一时间下的不同环境信息量(次信息量)对主信息量具有辅助作用,使事件决策获得最优解。因此,多数量、全种类的传感器为机器人完善周边信息提供必要条件。
因为机器人与环境交互是多维信息量,需要多传感器从环境中采集,而目前各传感器多为单一用途,信息为一维信息量,且机器人体表面积及负荷有限。而生物同一信息交互媒介可以完成多种环境信息交互,故设计一种阵列式传感器,信息采集单元分为散射式与同心式,采用通道复用及时间复用算法,使一种传感器完成相应多维环境信息交互。
2 机器人信息处理
2.1 数据降维
目前数据降维分为线性降维和非线性降维,降维方法也多种多样,而对于机器人采集得到的环境信息,应能使数据降维之后在思维决策时快速复原,因此需要尽可能地保留数据信息,所以采取线性降维的PCA降维方法,文献[15]列出了其主要算法。假设对于环境信息向量,我们有 m 个数据 X1,X2,X3,…,Xm,其中 Xi∈Rn,这些数据已经被中心归零化,即

定义其协方差矩阵

因为C为半正定矩阵,对其进行去角化,得

其中 Λ=diag(λ1,λ2,…λn)VVT=1。假设 C 的秩为 p,那么C有个非零的特征值,记为

我们取前k个特征值所对应的特征向量V1,V2…Vk作为我们的投影方向,那么对于任何一个样本Xi,我们计算 Yi=Vi,i=1,2,....,k,那么我们可以用[Y1,Y2,…Yk]T来表示样本Xi,这样便将数据从n维降到k维。当k=n=p时,即C满秩,并且我们去n个基进行投影时,PCA就相当于对坐标系进行了正交变换。
PCA主要思想是将数据向使得投影方差较大的方向投影,这样可以尽可能地保留数据信息,可以用图1说明。对于机器人与环境信息交互,在机器人思维决策,需要尽可能完整复原原信息来说,PCA是有很明确的物理意义的。
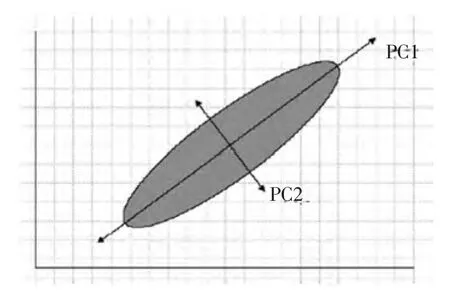
图1 PCA示意图
2.2 稀疏学习
稀疏是感知的重要特征之一,稀疏学习只需要少量的观察值和特征集合就能够很好的对高维数据进行处理分析,这将克服传统的信号表示中由于基函数的正交性和完备性带来的缺陷[16]。机器人在与环境进行信息交互及思维决策时,需要快速读取记忆库数据并进行匹配,因此处理的数据量应尽量小,从而保证响应速度,因此需要对少量观察值及特征值进行处理。根据机器人与周边环境进行信息交互的特征,对比各种稀疏学习算法,应用文献[17]中Sparse K_SVD算法进行稀疏学习。
任意长度为N的一维信息Xi∈RN,通过冗余字典D∈RN×K,可稀疏表示为
素心道:“就为二阿哥认床,主子不是嘱咐乳母把潜邸时二阿哥睡惯的床挪到了阿哥所么?宫里又足足添了十六个乳母嬷嬷照应,断不会有差池的。”

式中:α为信息的稀疏表示系数,为K×1的向量;dk为给定冗余字典D中的一个原子;αk为α向量中与dk相对应的值。信息的稀疏表示是从冗余字典中选择具有最佳线性组合的若干原子来表示信号,实际上是一种逼近过程,从稀疏逼近角度出发,希望在逼近残差达到最小的情况下得到α最稀疏的一个解,这等同于解决下述问题:

考虑机器人与环境交互信息为加性信息,其单一维度信息模型表示如下:
式中:Xi为原始信息;Xt为特征信息;Xz为杂散信息。根据式(6)从冗余字典D中选取最佳线性组合的若干原子来表示原始信息Xi,当逼近残差足够小时,利用式(6)求解的稀疏矩阵,通过重构的和特征信息Xt近似,从而把特征信息从信息中提取出来。
3 机器人信息机制
3.1 学习机制
按照人工智能大师H.Simon的观点,机器学习就是系统在不断重复的过程中对本身能力的增强或改进,使得系统再执行同样或类似的任务时,会比原来做得更好或效率更高。机器学习是一个有特定目的的知识获取过程,其内部表现为从未知到已知这样一个知识增长过程,其外部表现为系统的某些性能和适应性的改善,使得系统能够完成原来不能完成或更好地完成原可以完成的任务。机器学习旨在如何使机器通过识别和利用现有知识来获取新知识的技能,既要注重知识本身的增加,也注重获取知识的技能的提高[14]。
传统机器学习算法如图2所示,其对当前周边信息进行的思维决策根据主要来自于知识库以及当前环境信息,但其机器学习知识来自于当前环境信息,而未与知识库构成反馈。改进后机器学习模型如图3所示。机器人思维决策根据来自于当前环境信息,机器人知识学习由知识库与学习行为构成反馈闭环,再与当前环境信息共同影响机器人学习行为。使其得到更好的决策结果,且机器人进行思维决策之后,对知识库中的知识有重学习及重记忆的反馈过程。

图2 传统机器人学习模型
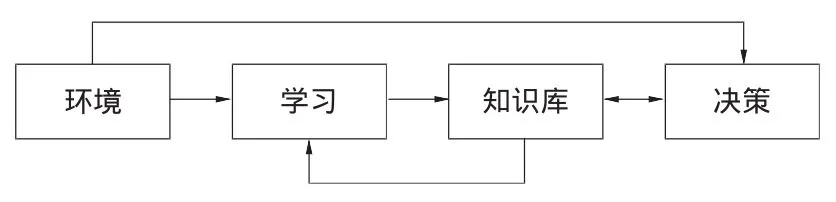
图3 改进机器学习算法
3.2 遗忘机制
根据生物特性,生物对于信息的记忆性主要由信息的重要性、使用频率、经过时间来决定。人对环境信息以及新学习知识对于经过时间的遗忘规律有著名的艾宾浩斯遗忘曲线,即遗忘在学习之后立即开始,而且遗忘的进程并不是均匀的。最初遗忘速度很快,以后逐渐缓慢,保持和遗忘是时间的函数。设记忆后经历了时间t0,则记忆量为

可见,生物的记忆对于时间是指数性反比关系,而指数型数据处理难度较大,对机器人的信息响应速度影响也较大,故对于机器人记忆相对于时间采用线性反比性函数关系,设机器人记忆后经历了时间t0,记忆量为

如式(7)及式(8),Xi(t+t0)为经过t0后记忆库中的信息,Xi(t)为原始信息,k为时间比例系数,其取值由拟合逼近使式(8)与式(7)残差最小化。
对于信息使用频率对机器人记忆库中信息的影响,具有时间一致性的各信息,使用频率越大,在经过同样时间后,记忆库中信息量各异,使用频率对机器人记忆库信息的影响为正向性关系。如经过时间对机器人记忆库影响,建立线性正比关系:

式中:Xi(t)为记忆库原始信息;Fu为该信息被机器人使用频率;m为频率系数,根据信息不增性,应满足mFu≤1。
由上述,信息的重要性对记忆库中信息也有影响,信息重要性分为相对重要性及绝对重要性。某一信息量若具有绝对重要性,那么对其他信息量具有信息屏蔽(信息阻塞)作用。某一信息具有相对重要性,那么相对其他信息量在机器人进行多信息综合决策具有优先权。令X0(t)为标记信息量,对各信息量重要性进行线性加权,则

式中:PXi(t)为信息量Xi(t)的相对重要性;qi为其相对比例系数,若其具有绝对重要性,则qi>>1。
4 机器人思维模型
生物的思维可建立成如下模型,环境信息刺激,生物对信息分析,思维决策,信息学习、记忆或重记忆,其具体模型如图4所示。根据生物思维模型,机器人思维模型如图5所示,机器人获得的环境信息,是具有时间一致性的各单一维度信息集合,经过分解成单一维度信息向量,再经过单一维度信息向量的信息降维,减少数据计算量,然后经过适合机器学习的K_SVD稀疏算法,并结合机器人记忆库中的的已有知识,进行当前信息的思维决策、机器人学习以及记忆库的完善等。对于机器人存在的遗忘机制,对于信息缺失,信息遗忘等问题,由记忆库完善及机器人再学习及重记忆完成。
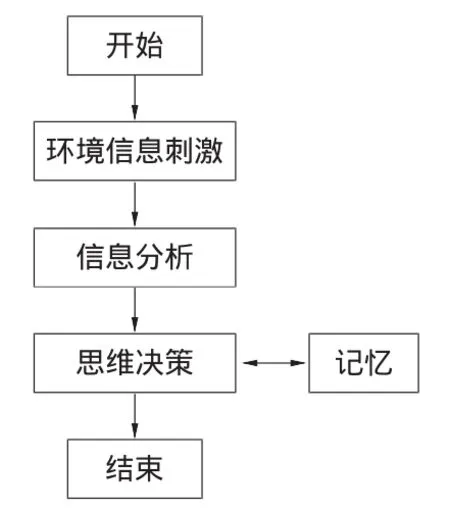
图4 生物思维模型
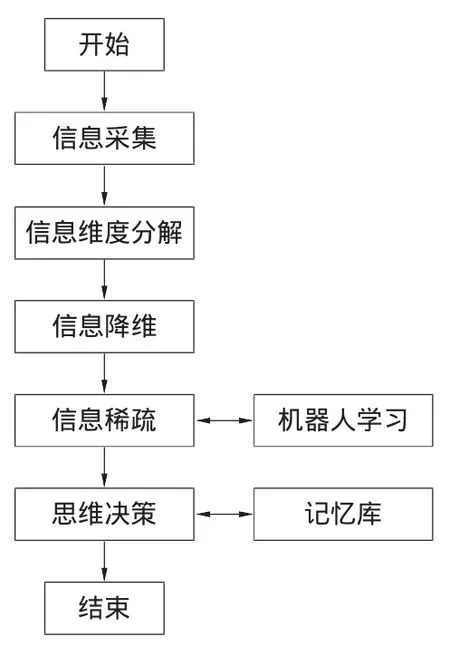
图5 机器人思维模型
5 结语
提出了一种机器人自主思维方法,根据生物特性,结合PCA降维方法及Sparse K_SVD算法,建立机器人学习机制及遗忘机制,解决传统机器人无法离线学习、任务确定以及智能扩展性差、无法适应多变的环境等多种局限性问题,有效提升了机器人的实用性及智能性。
[1] 陈巍.聚焦“机器思维”的跨学科思维盛宴[J].科技导报,2011,29(14):80.
[2] 翟心昱.基于仿人脑认知计算模型的机器人视觉学习方法[D].杭州:浙江工业大学,2012.
[3] 张丽.基于HTN方法的记忆机器人任务规划研究[D].哈尔滨:哈尔滨工业大学,2010.
[4] United Nations Global Pulse.2012,Big Data for Development:Challenges&Opportunities[R].2012.
[5] Office of Science and Technology Policy.Executive Office of the President.2012,Fact Sheet:Big Dataacrossthe Federal Government[R/OL].[2012-12-21].Http://www.whiteHouse.gov/Ostp.
[6] Office of Science and Technology Policy.Executive Office of the President.2012,Obama Administration Unveils “Big Data”Initiative:Announces$200 Million in New R&D Investments[R/OL].[2012-03-19].http://WWW.WhiteHouse.gov/OSTP.
[7] Mckinsey Global Institute.2011 Big Data the Next Frontier for Innovation,Competition,and Productivity[R].2011.
[8] Rajaraman A,Ullman J D.Mining of Massive Data-sets[M].Cambridge:Cambridge University Press,2011.
[9] Lapkin A.Hype Cycle for Big Data[R].Gartner,Inc.2012.
[10] Miller H J,Han J.Geographic Data Mining and Knowledge Discovery[M].London:Taylor and Francis,2009.
[11] Barabasi A L.Bursts:The Hid den Patterns Behind Everything We Do[M].Plume Books,2011.
[12] 舍恩伯格,库克耶.大数据时代:生活、工作与思维的大变革[M].盛杨燕,周涛,译.杭州:浙江人民出版社,2012.
[13] 李健宏.人工智能中的机器学习研究及其应用[J].江西科技师范学院学报,2004(5):84-86.
[14] 马小龙.数据降维方法综述[D].北京:清华大学,2005.
[15] 宋彩风,刘伟锋,王延江.基于稀疏学习的人脸表情识别[J].山东科技大学学报(自然科学版),2013,32(3):28-34.
[16] 黄玲,李琳,王薇,等.基于Sparse K-SVD学习字典的语音增强方法[J].厦门大学学报(自然科学版),2014,53(1):36-40.
