D-S 证据理论在舰机目标识别中的应用*
2015-12-25宁克俭
宁克俭
(中国西南电子技术研究所,成都 610036)
1 引言
现代战争具有突发性、快速性、大纵深、全方位、空地海一体化、持续时间短等特点,战场情况瞬息万变,因此快速、准确、可靠地识别战场目标显得十分重要。现代战场上,舰船和飞机是重要的军事力量,也是作战打击的重要目标,因此,如何及时、准确地发现和识别舰机目标是各国军方长期研究的课题[1]。
目标识别主要是利用传感器对目标进行侦察/探测得到的目标暴露征候数据,通过对数据进行分析、融合和判证等处理,给出目标的类别、型号、敌我属性等特性信息[2]。由于传感器本身性能差异、外部环境因素变化等原因,目标识别处理必须面临各种不确定信息的问题[3]。目前,解决不确定性问题的主要途径是推理技术,在各种推理技术中,最基本、最常用的是D-S(Dempster-Shafer)证据理论。随着军事需求的牵引和理论研究的逐渐深入,人们对D-S 证据理论进行了许多应用尝试,提出了不少优化改进算法[4-5],但在实际应用中依然存在不少问题需要进一步研究,尤其是在缺乏专家知识时如何完成基本概率赋值。
本文基于舰机目标平台搭载辐射源的个性差异,研究D-S 证据理论在舰机目标识别中的应用方法,结合舰机目标的实际情况说明了目标识别框架、测量框架、基本概率空间的构建过程,针对缺乏专家知识无法应用的问题提出了一种基本概率赋值的方法,并在仿真环境进行试验和评估。
2 D-S 证据理论的基本概念
证据理论于1976 年由Dempster A P 首先提出,后由他的学生Shafer G 加以改进和扩展,使之成为符合有限离散领域中推理的形式,所以证据理论被称为Dempster- Shafer 证据理论,简称D- S 理论[6]。
定义1 识别框架
设U 表示X 所有可能取值的一个论域集合,且所有在U 内的元素间是互不相容的,则称U 为X 的识别框架。U 可以有限也可以无限,在专家系统的应用中是有限的。
定义2 基本概率赋值
设函数M:2U→[0,1],且满足M(Φ)=0 和=1 时,称M(A)为A 的基本概率赋值。
定义3 信度函数和似然函数
定义函数

称该函数是U 上的信任函数,也称为下限函数,表示对A 的全部信任,所以有BEL(Φ)=0,BEL(U)=1。
定义似然函数PL:2U→[0,1]为

式中,PL 称为上限函数,表示不否定A 的信任度,且有PL(A)≥BEL(A)。A 的不确定性U 由PL(A)-BEL(A)表示,[BEL(A),PL(A)]称为A 的信任区间。
若识别框架U 的子集为A,具有M(A),则称A为信任函数BEL 的焦元(Focal Element),所有焦元的并称为核(Core)。
定义4 组合规则与决策方法
证据理论中的组合规则提供了组合两个证据的规则。设M1和M2是2U上的两个互相独立的基本概率赋值,现在的问题是如何确定组合后的基本概率赋值:M=M1M2。
设BEL1和BEL2是同一识别框架上的两个信任函数,M1和M2分别是其对应的基本概率赋值,焦元分别为A1,A2,…,AK和B1,B2,…,Br,又设
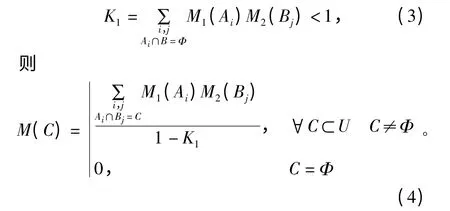
式中,若K1≠1,则M 确定一个基本概率赋值函数;若K1=1,则认为M1和M2矛盾,不能对基本概率进行组合。按照以上过程将证据组合的方法称为Demsper 组合规则,对于多个证据的组合,可以采用Demsper 组合规则对证据进行两两综合。
3 DS 证据理论的应用
3.1 需求分析
对舰机目标的资料进行分析研究可以发现,不同规格型号的飞机平台或舰船平台其搭载的辐射源有所不同,且所搭载的辐射源是相对固定的。可以确定:如果已知飞机平台或舰船平台搭载有哪些辐射源,则可以进一步识别出飞机平台或舰船平台的规格型号。
因此,实际应用中,要识别飞机平台、舰船平台的规格型号,可以先对资料分析研究,掌握待识别的舰机平台所搭载的辐射源;通过传感器/侦测系统,发现辐射源;通过关联分析处理,得到辐射源与舰机平台的相关性;基于舰机平台与辐射源的关联关系,通过融合处理技术,进一步推理出飞机平台、舰船平台的规格型号。
3.2 设计及应用
仿真试验环境下,模仿舰机目标平台进入侦测手段的威力范围,在不同战斗状态下工作,启用一台或多台辐射源;情报信息模拟源模拟侦测手段,向融合处理中心提供多来源的目标态势信息,不同来源的信息具有缺失性、互补性、重复性和冲突性,信息集合大致可以划分为基本特性信息、位置特性信息、运动特性信息、电磁特性信息和其他特性信息等;通过前端融合处理,完成关联分析、航迹融合、辐射源识别之后,需进一步完成飞机平台和舰船平台的识别。
为便于研究,假设待识别的舰机目标型号有某型入侵者攻击机、某型预警机、某型战斗机、某型导弹驱逐舰、某型驱逐舰、某某型弹驱逐舰、某型护卫舰和某型航空母舰,分别标识为T1、T2、T3、T4、T5、T6、T7、T8;对舰机目标进行分析研究,待识别的舰机目标平台上可能出现的辐射源型号有S1、S2、S3、S4、S5、S6、S7、S8、S9、S10、S11、S12,则目标识别框架和测量框架分别为

可能搭载有S 中某元素的未知目标集合用U表示,可以构建出基本概率赋值空间如表1 所示。
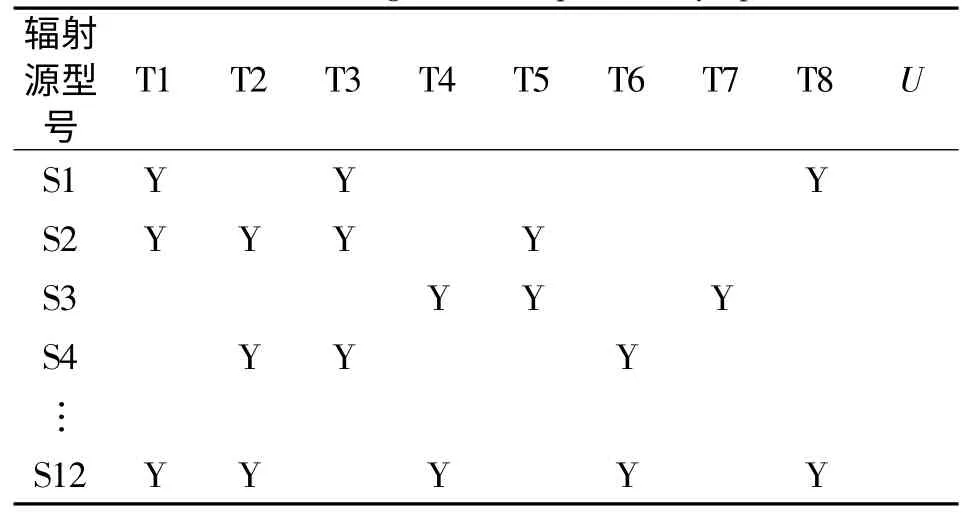
表1 未赋值的基本概率空间Table 1 Unassigned basic probability space
以上是未赋值的基本概率赋值空间,其中“Y”表示对应的舰机目标平台有该辐射源装备,如已知S1 辐射源出现在T1、T3 目标平台上,还有可能出现在其他目标平台U 上;舰机目标平台T1 搭载有辐射源S1、S2、S12。
为了便于讨论,将表1 中待进行基本概率赋值的空间记为Xij(其中i 为属性测量框架中辐射源序号,j 为目标识别框架目标序号),并将辐射源Si 出现在不同的目标上的总数记为C,提出基本概率赋值方法如下:

按照以上公式进行计算,对表1 进行基本概率分配,分配结果如表2 所示。
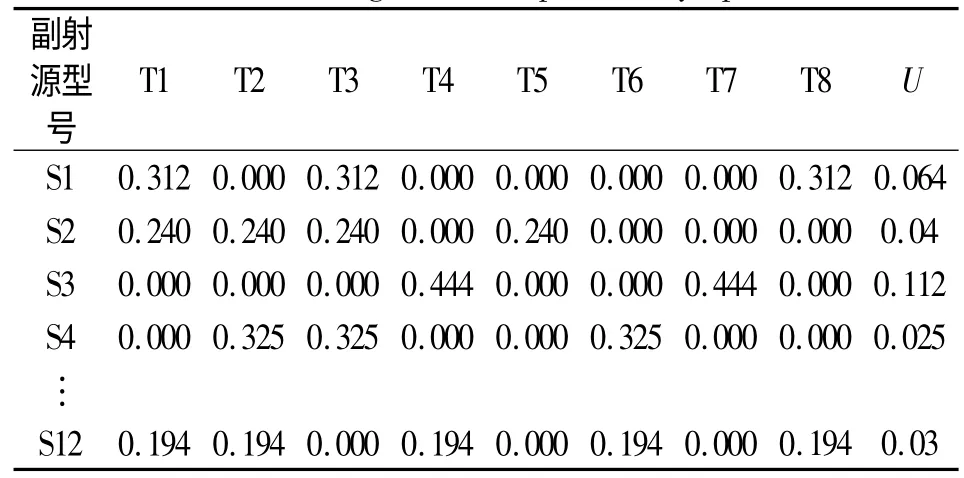
表2 已赋值的基本概率赋值空间Table 2 Assigned basic probability space
有了基本概率赋值,则可以按照D-S 证据组合规则进行计算。先根据公式(3),将表中基本概率赋值代入M1和M2,计算出K1;再根据公式(4),计算出M(C);最后进行证据识别决策。
4 试验情况
试验环境由情报信息模拟源、融合处理软件和融合结果评估软件三部分组成。情报信息模拟源软件负责完成多种场景的想定和推演,并充分考虑舰机目标平台上的辐射源会开机或静默以及不同侦测手段由于本身的探测能力或环境因素的影响,可能只探测到目标平台上的部分辐射源等情况。融合处理软件基于接收到的多来源情报信息,利用D-S算法完成证据组合,通过识别决策给出识别结果。融合结果评估软件完成识别结果与模拟源的对比,评判各种条件下识别结果:正确识别、错误识别、未识别(即拒判,由于信息量不足不能给出结果)。融合结果评估软件的评估情况如图1 所示。
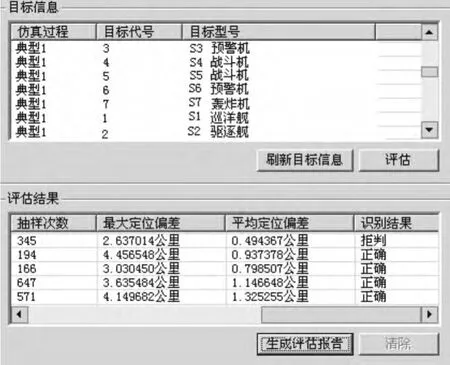
图1 融合结果评估软件界面Fig.1 Interface of fusion result evaluation software
试验发现,随着汇集信息的积累,关联辐射源逐渐增加,证据组合后的函数值逐渐收敛,达到识别门限后给出舰机目标的识别结果;从评估结果可以看出,拒判率低,识别率高,识别效果良好。
5 结束语
在实际应用中,识别框架的构建和基本概率赋值是D-S 证据理论成功应用的关键环节。本文在对D-S 证据理论的基础原理和现有算法分析研究的基础上,结合舰机目标识别的需求场景,说明了D-S 证据理论的应用过程,提出了一种基本概率赋值方法,并在仿真环境中试验证明了该方法的有效性和可用性。
本文介绍的D-S 证据理论在舰机目标识别中的应用方法可作为其他应用场景的参考,可在此基础上进一步研究具有自学习能力的基本概率赋值方法。
[1]朱银川,张驿.海域综合敌我识别系统发展建议[J].电讯技术,2012,52(6):846~852.ZHU Yinchuan,ZHANG Yi.Development Proposals for Integrated IFF System for Sea Areas[J].Telecommunicatiom Engineering,2012,52(6):846-852.(in Chinese)
[2]时宏伟.现代战争目标识别技术综述[J].电讯技术,2003,43(增1):1-12.SHI Hongwei.Summarization of Modern Ware Target Recognition Technology[J].Telecommunicatiom Engineering,2003,43(Suppl.1):1-12.(in Chinese)
[3]陈怀新.证据组合推理及其在目标识别中的应用[J].电讯技术,2006,46(增3):28-34.CHEN Huaixin.Evidence Cobination Theory and it's Application in Target Recognition[J].Telecommunicatiom Engineering,2006,46(Suppl.3):28-34.(in Chinese)
[4]黄金,程咏梅,皮燕妮,等.基于神经网络和证据理论的图像目标识别研究[J].计算机仿真,2005,22(11):184-186.HUANG Jin,CHENG Yongmei,PI Yanni,et al.Research of image target recognition based on nerve network and DS theory[J].Computer Simulation,2005,22(11):184-186.(in Chinese)
[5]万洪容.基于特征融合与规则推理的目标识别[J].电讯技术,2012,52(5):654-657.WAN Hongrong.Target Recognition Based on Muti feature Fusion and Rule based Reasoning[J].Telecommunication Engineering,2012,52(5):654-657.(in Chinese)
[6]何友,王国宏.多传感器信息融合及应用[M].北京:电子工业出版社,2000.HE You,WANG Guohong.Multisensor Information Fusion with Application[M].Beijing:Publishing House of Electronic Industry,2000.(in Chinese)