短跑运动员王能希髋摆动技术改进对百米成绩的影响
2015-12-25沈易弘
沈易弘
短跑是以磷酸原系统和糖原无氧酵解供能跑完全程的极限强度运动,短跑时的最高速度是在磷酸原系统供能情况下达到的。然而磷酸原系统的持续供能时间极为有限,通常仅6 s左右。因此,通过改善技术环节,实现以尽可能接近最高速度的速度进行途中跑,对提高短跑成绩至关重要。多年来,短跑成绩的不断提高完全归功于训练手段的日益科学化,以及短跑技术的日臻完善。单就短跑后蹬动作的技术而言,由原本只注重下肢伸膝肌群发力逐渐过渡到重视下肢髋关节肌群发力前摆,并强调“以摆促蹬、蹬摆配合”作为技术要点。许多文献都对髋关节摆动技术的动作结构进行了相应的分析研究和理论探讨[1-11],但是针对这一理论进行训练实践应用的实例比较鲜见。笔者对历经两年跟踪观察的实验对象并对其短跑技术动作的运动学指标数据进行分析,旨在揭示短跑髋关节摆动技术对提高短跑成绩的作用,为提高短跑运动项目的训练水平提供一定的参考。
1 研究对象和研究方法
1.1 研究对象
以上海体育学院附属竞技学校现役短跑运动员王能希为研究样本。王能希,男,19岁,身高 180 cm,体重70 kg,从事短跑专项训练5年,运动员等级水平为短跑一级。
1.2.1 文献资料法
利用上海体育学院图书馆现有相关资料以及中国期刊网数据库,通过文献检索,查阅近二十多年来国内短跑技术有关方面的文献资料63篇,其中参考17篇。对目前短跑髋摆动技术的研究现状、发展趋势和特征进行全面了解和分析,并收集相关文献资料。
1.2.2 实验法
分别于2012年3月15日和 2014年1月 17日,在上海体育学院室内田径馆对短跑运动员王能希的途中跑技术进行现场拍摄。拍摄采用一台MOTIONPRO4摄像机,摄影机被放置在跑道的正侧面,距离起跑线65 m处,机高离地1.5 m,镜头距运动平面10 m,拍摄频率为250帧/秒,镜头主光轴与运动平面垂直。运动员每次测试拍摄3次途中跑,选取最好成绩一次进行解析。
在运动学解析时,采用上海体育学院运动生物力学实验室自行研制的SBCAS2运动分析系统,选用德国模型对王能希前后两次途中跑图像进行解析,对有关数据进行必要的平滑处理,获得途中跑动作技术的各种速度、时间、位移、角度、角速度等运动学数据。
1.2.3 对比分析法
根据相关短跑运动学理论和短跑专项技术原理等有关理论或原理,对所采集到的相关数据结果进行对比分析。
2 结果与分析
现代短跑的髋摆动技术是指以髋关节为主导的摆动技术,在腾空阶段分为摆动腿绕髋关节额状轴前摆和后摆2个部分,在进入支撑期后支撑腿积极下压并迅速伸髋完成后蹬动作,该技术贯穿蹬摆的全过程。该技术能通过改变髋关节肌肉群协同作功的方式,改变髋关节的摆动的速度和幅度,形成步长与步频的合理配置。
2.1 髋摆动技术与减少前蹬阻力
短跑的前支撑阶段确实存在前蹬阻力,这是由于着地时会产生水平支撑反作用力的原因,前蹬阻力为(F为地面对人体的支撑力、θ为着地角),所以着地角度越大,人体受到的水平阻力越小。表2的数据显示,运动员的髋摆动技术动作改进后,王能希的髋关节摆动幅度增大,髋关节蹬伸幅度加大,着地角度(见图1、2)明显增大,着地瞬间足相对于地面的水平速度有所下降。由此可见,途中跑着地前积极主动的伸髋、大腿下压着地,增大着地角,着地瞬间足相对于地面的水平速度下降,有助于减小前支撑期的阻力。李诚志指出,前支撑阶段的阻力大小取决于脚着地瞬间相对地面的水平速度,脚着地瞬间正向水平速度越大,前蹬制动力就越大[1],反之则越小。所以,短跑途中跑技术要求运动员在前支撑阶段尽力减少前支撑阻力。
2.2 髋摆动与增加后蹬动力
短跑途中跑在后支撑阶段的主要任务是尽可能多的获得向前动力,从而提高跑速及运动成绩。运动员的后支撑阶段后蹬时,髋、膝、踝三关节快速蹬伸所形成的支撑反作用力是后蹬产生的主要动力,后蹬反作用力产生于蹬地动作,支撑腿在后支撑阶段通过伸髋、伸膝获得支撑反作用力,其水平支撑反作用力为Fcosθ(F为后蹬力量的反作用力、θ为后蹬角),水平支撑反作用力越大,产生的水平速度的越大,因而,蹬地角的角度越小获得的水平速度越大。而过大的后蹬角,会引起腾空高度的增加和腾空时间的延长,造成重心波动,损害步长与频率的合理配置,从而影响到跑速的综合效益。
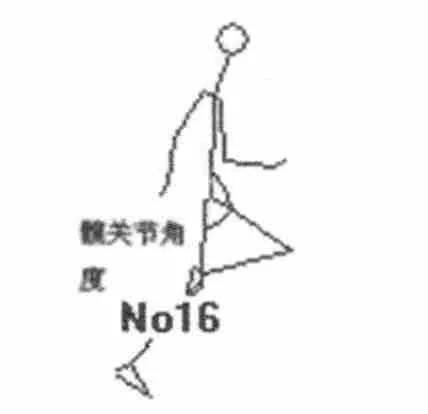
图1 髋关节角度Figure 1 Hip Joint Angles

图2 着地角Figure 2 Landing Angle
从表2可以看到,王能希的髋关节蹬伸角度由原本的11°加大到 37°,而此时,膝关节的角度(见图 3)则由原本的8°减小为现在的3°,说明王能希在技术改良后,其膝关节只是作为一个传导动力的刚体,在后支撑阶段髋关节作功的能力大大加强,动力效果明显提高。这些都直接导致其后支撑获取动力的时间增长0.003 s,后支撑阶段位移距离增长0.04 m,以及后蹬角(见图4)减小9°。后蹬角减小9°从而使得水平反作用力的增加,这对提高人体的水平速度有积极作用,对步长与步频的合理配置起到积极的影响。这技术更符合现代短跑技术发展的特点。

表2 王能希的支撑阶段运动学指标对照表Table Ⅱ Kinematic Index Cross-reference of Wang Nengxi in the Supporting Phase

图4 膝关节角度Figure 4 Knee Joint Angle
2.3 髋摆动与腾空期身体重心位移
腾空阶段的任务是在尽可能在短的时间内增大步长,同时为髋关节反向运动完成着地动作在时间和空间上的准备。腾空期身体重心位移距离是由离地瞬间身体重心速度所决定的,而支撑反作用力的大小和方向直接影响该身体重心速度的形成,因此,反作用力的大小和方向是关键要素。结合表2、3可以看出,蹬地角度的减小,改变了腾空时人体重心的移动轨迹,导致位移距离的增加,使得步长加大。
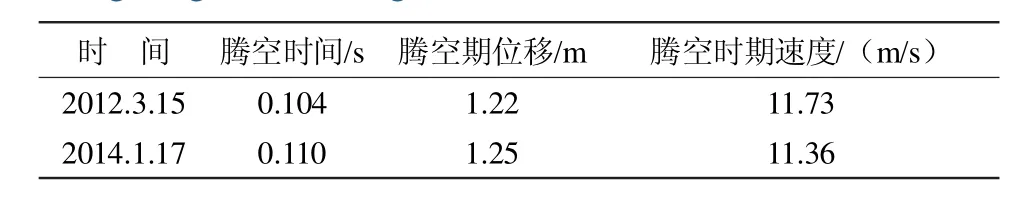
表3 王能希的腾空期时间、位移、速度对照表Table Ⅲ Cross-reference of Time,Movement and Speed of WangNengxi in the Flight Phase
2.4 髋摆动技术对步长、步频的影响
步长、步频数据能够最直接反映技术的合理性,步长是指支撑腿离地点与摆动腿着地点之间的水平距离,由身体重心在支撑阶段水平位移和腾空期水平位移这2个部分构成。步频是指在单位时间内腿交替的次数,受到前支撑时间、后支撑时间、腾空时间的影响。步长、步频是影响速度的两大要素,也是观察短跑运动员技术的重要指标。通过两年的训练及技术改进,王能希的途中跑时髋关节屈伸及前后摆的幅度、角速度都有着明显的提升,并且在蹬地角明显减小的情况下腾空时间增加0.006 s,腾空期身体重心位移也相应增长了0.03 m。由此可见,他在屈髋技术得到强化后,能在减少重心波动差的同时增加腾空期的位移,并因此增大步长。
对比王能希的两次测试数据(见表4)可以发现,在髋摆动技术得到改善后,其单步步长提升了0.07 m,步频则相应下降了0.1 Hz。其中,在支撑期位移距离增加0.04 m的同时,支撑时间缩短0.002 s,致水平速度提高0.6m/s;在腾空期位移距离增长0.03 m,同时腾空时间延长0.006 s,步频则降低0.1 Hz。步长的增长,包括了支撑期位移和腾空期位移增长,由于在支撑期摆动腿髋绕支撑腿髋关节垂直轴的向前摆动,增加了身体重心的支撑期水平位移;在支撑阶段髋关节绕额状轴的大幅度前屈高抬以及快速后伸增加后蹬动力,增加了身体重心的腾空期水平位移。支撑时间的减少是由于减少前支撑阶段的阻力,
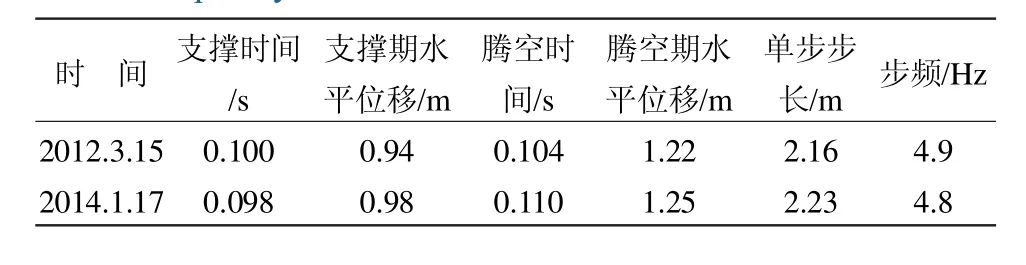
表4 王能希的步长、步频对照表Table Ⅳ Cross-reference of Wang Nengxi’s Step Length and Stride Frequency
2.5 髋摆动技术对成绩的影响
短跑是由速度来衡量成绩的项目,运动员所具备的最大速度,以及维持最大速度的能力决定其成绩。途中跑是短跑项目中距离最长的技术环节,因此,途中跑平均速度的快慢,对成绩的取得具有决定性的作用,其维持高速跑的能力越强,成绩也就越好。通过近两年针对髋摆动技术的训练,途中跑的最大水平速度由原本的10.59 s提升至10.73 s。王能希的最大速度水平并没有非常明显的提升,运动员的百米成绩有了显著提高,由10.94 s提高到了10.67 s,幅度达0.27 s,这是因为运动员的髋摆动技术的改善,由于减少前支撑阶段的阻力,增加后蹬水平分力,增大水平位移,节省了运动员跑动的能量,虽然途中跑的最大水平速度提高不大,但提高了维持最大速度的能力,提升了途中跑阶段最大速度利用率。由此可以认为,王能希的百米成绩的提高,是提高了维持最大速度的能力、提高了最大速度利用率的结果。
3 结论
3.1 髋关节的快速后摆动作,在脚着地前积极后摆下压,增加了着地角度,减少前支撑阶段的着地阻力;减小了后蹬角度,在后支撑阶段增加后蹬水平动力,提高了重心水平速度。
3.2 髋关节的大幅度快速前摆,,在腾空期增大重心水平位移距离。髋关节摆动技术还能优化步长与步频的关系,使运动员在最大速度变化不大的情况下,大幅提高专项成绩。
[1] 李诚志.百米跑落地动作的生物力学分析[J].中国体育科技,1987,23(9):16-18.
[2] 黄香伯.短跑鞭打扒地动作数理分析尝试[J].武汉体育学院学报198014(2):19-26.
[3] 王鲁克.现代短跑技术特点及发展趋势[J].山东体育学院学报,2000,16(3):33-35.
[4] 于湘泽.对现代短跑技术特点及发展态势的认识[J].哈尔滨体育学院学报,2001,19(1):79-81.
[5] 代进军,许瑞勋.短跑伸髋高摆扒地技术探析[J].河南师范大学学报,2002,43(2):78-81.
[6] 宫本庄.,通过下肢肌电观察对短跑途中跑技术和专门力量训练中一些问题的探讨[J].体育科学,1985,5(2):52-55.
[7] 苏仕君.短跑途中跑的生物力学分析[J].安徽体育科技,1992,13(1):4-5.
[8] 吴太平.再论短跑技术训练中“以摆带蹬,蹬摆结合”[J].成都体育学院学报,1986,12(4):46-47.
[9] 徐开春.试论现代短跑技术的发展趋向[J].中国体育科技,1998,34(2):14-16.
[10]王志强,吴飞,李清华,等.对短跑途中跑支撑阶段摆动技术机制研究[J].北京体育大学学报,2003,26(1):127-129.
[11]徐茂典,吴雪山.短跑途中跑支撑阶段摆动腿某些运动学特征研究[J].北京体育大学学报,2003,26(1):122-123.
[12]朱谦.“后扒式”短跑新技术的探索[J].上海体育学院学报,1987,11(2):48-53.
[13]骆建,黄全会.对短跑途中跑着地缓冲技术的生物力学研究[J].成都体育学院学报,1995,21(1):29-35.
[14]赵杰.后蹬式与屈蹬式短跑技术分析[J].武汉体育学院学报,1995,29(1):63-65.
[15]张仲景,李新江.对短跑途中跑支撑脚后蹬扒地技术的初步探讨[J].河北体育学院学报2004(4):16-17.
[16]王卫星.髓部肌群对跑速的作用与训练[J].中国体育科技,1993,29(5):32-36.
[17]李强.基于“屈蹬式”短跑技术的研究[J].哈尔滨师范大学自然科学学报,2003,21(3):103-105.