一种针对转发式欺骗干扰信号的负延时补偿方法*
2015-12-24王海洋姚志成范志良
王海洋,姚志成,范志良,郑 堂
(第二炮兵工程大学 控制工程系,西安 710025)
1 引言
卫星导航干扰技术分为压制式干扰和欺骗式干扰。压制式干扰是指发射大功率信号阻塞目标通信链路,使目标接收机无法捕获跟踪导航信号,然而压制式干扰信号强度大、易被发现,而且随着功率倒置技术和自适应调零技术的应用[1-2],压制式干扰的发挥空间也越来越小。欺骗式干扰是指转发真实卫星信号或生成高逼真卫星信号,使目标接收机解算出错误的导航信息,从而实现欺骗干扰,欺骗式干扰信号发射功率较小,不易被目标接收机发现,欺骗性强。欺骗式干扰又分为生成式干扰和转发式干扰[3]。生成式干扰由于需要了解卫星导航信号的全部结构[4],因此只能仿真生成码型公开的民用码,难以实现对保密性很强的军用码的生成式欺骗,这也极大限制了生成式欺骗干扰的作用范围;而转发式干扰[5]只需要对真实卫星信号进行接收、延时、尔后转发出去即可,不存在军用码的限制问题,因此受到了广泛的关注。
转发式欺骗干扰的核心问题是控制转发信号的延时,使目标接收机根据定位方程解算出错误的坐标,实现误定位,达到欺骗干扰目的。文献[6]比较深入地分析了GPS 转发干扰造成定位误差的本质性原理,并分析了伪卫星数目的变化带来的定位误差;文献[7]通过建立接收机模型,对干扰效果进行了仿真,验证了转发式欺骗干扰的可行性;文献[8]介绍了转式欺骗干扰的基本原理,并利用systemview 平台建立了GPS 欺骗对抗仿真试验系统,得到了转发延迟量;文献[9]详细推导了转发式欺骗干扰的延时算法,论证了所加延时的合理性与可行性;文献[10]针对转发延时对接收机授时的影响,研究了转发器位置布局对虚拟点的选择范围的影响。但是以上文献都没有对转发信号出现负延时情况下的解决方法与可行性进行深入研究,实际上,为了实现预定欺骗目的,往往会出现转发信号需要进行负延时的情况,而负延时在物理上又是无法实现的,但在工程中这个问题却几乎不可避免。针对这个问题,本文提出了为所有通道转发信号统一添加延时修正量的解决方法,通过理论分析与仿真试验验证了方案的可行性,并提出了选择延时修正量的最小化原则。
2 转发式欺骗干扰基本原理
转发式欺骗干扰的基本原理是通过实时接收天上卫星信号,延时后转发出去,一旦目标接收机锁定转发信号参与定位,那么根据定位方程解算出的定位位置就会出现偏差,从而实现欺骗干扰目的。转发式欺骗干扰根据布局可以分为单站式和多站式,但是基本原理是一致的,图1 显示的是转发式欺骗干扰的单站式布局原理图。
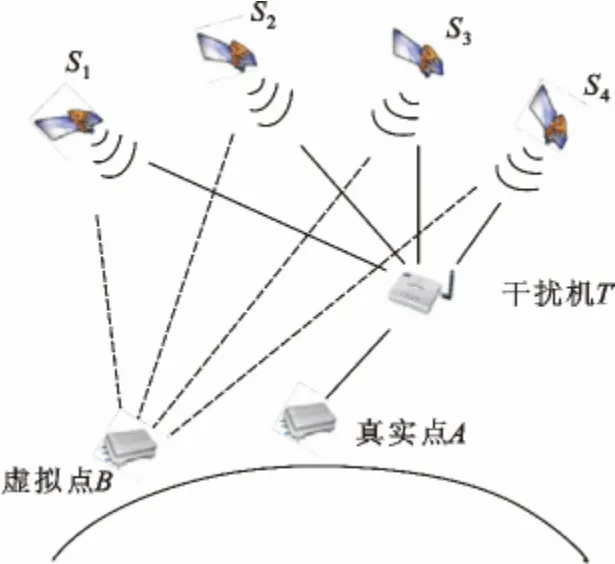
图1 转发式欺骗干扰原理图Fig.1 Principle of repeater deception jamming
图中目标接收机在A 点,干扰机位于T 点,接收机对接收到的卫星信号进行转发延时,并通过增益控制系统使得转发信号的增益略高于真实直达卫星信号,经过压制式干扰的辅助将迫使目标接收机失锁,失锁后目标接收机将会重新对导航信号进行捕获跟踪,此时增益略高的转发信号将会更容易被接收机锁定,从而使目标接收机误定位于B 点,实现诱骗,这就是转发式欺骗干扰的基本原理。
3 转发延时分析
3.1 转发延时算法
转发式欺骗干扰的时延算法是根据接收机的定位方程推导而来,接收机定位采用的是到达时间测量方法,即根据卫星信号到达时间与发射时间之差算出用户与卫星的距离,称为伪距。一般只需要3颗卫星的伪距就可以解算出用户位置,但是用户接收机与卫星时钟存在钟差,还需要1 颗卫星消除钟差影响,因此需要至少4 颗卫星才能解算出用户的位置。根据图1,以4 颗卫星为例,接收机锁定真实直达卫星信号的定位方程如式(1)所示:

式中,ρi(i=1,2,3,4)表示用户接收机根据真实卫星信号中调制的导航电文所解算出的与各卫星的伪距,|SiA|(i=1,2,3,4)表示用户接收机与卫星的真实距离值,tu表示卫星时钟与用户接收机时钟的钟差。如果接收机锁定转发信号,其定位方程如式(2)所示:
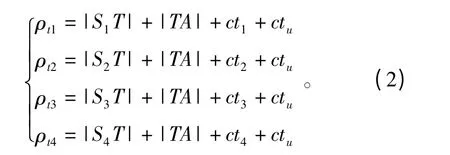
式中,ρti(i=1,2,3,4)表示根据转发信号解算出的伪距,|SiT|(i=1,2,3,4)表示参与定位卫星与干扰机的真实距离,|TA|表示干扰机与用户接收机的真实距离,ti(i=1,2,3,4)表示对各路卫星信号人为增加的延时,tu仍然表示卫星时钟与接收机时钟的钟差。显然,为了使得用户接收机误定位于B 点,那么定位方程必须满足式(3):
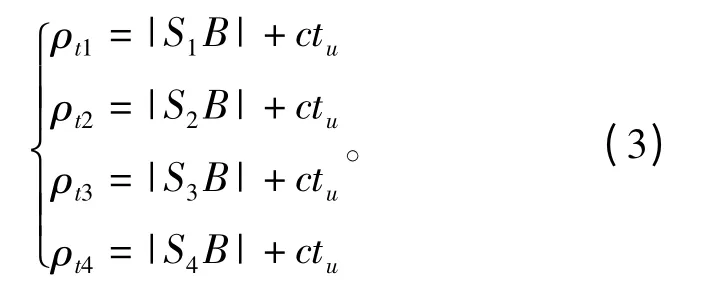
式中,ρti(i=1,2,3,4)与tu表达的含义与式(2)相同,|SiB|(i=1,2,3,4)表示卫星与欺骗位置点B 的真实距离,显然式(2)和式(3)应该满足关系式(4):

由式(4)又可进一步得到人为时延量的值,如式(5)所示:
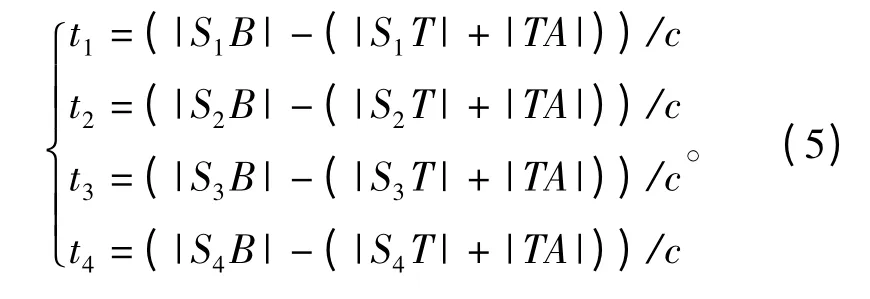
3.2 转发信号负延时补偿方案
分析式(5)可知,当欺骗位置点B 与卫星的距离小于转发信号所经过路径的距离,即

那么解算出来的转发延时量ti将是一个负数,在实际工程中这是无法实现的。因此构想对负延时进行修正,即对转发的每路信号都增加一个负延时修正量。转发信号的定位方程如式(3)所示,那么进行负延时修正后的方程如式(7)所示:

式中,等式左边部分相当于进行负延时修正后的伪距,右边的负延时修正量tΔ被视为钟差部分,由于在等式两边同时增加一个量与原等式是等价的,因此解出来的定位位置不会发生改变。
负延时的修正解决了工程中负延时无法实现的技术难题,但同时会带来另外一个问题:修正负延时相当于增加了传播时间,转发信号到达接收机时的到达时间比之前无修正的转发信号要晚,那么接收机根据到达时间原理得到的伪距必然增大,而在定位位置不变的情况下,接收机解算模块会把负延时修正量tΔ视为钟差的一部分,钟差由原来的tu变为了(tu+tΔ),而钟差变化量过大时就会被接收机发现并剔除,因此在选择修正量时应该遵循对接收机钟差影响最小化的原则。而且在同时存在多个负延时量需要修正时,应该使修正量既能够满足所有转发信号的负延时修正需求,又能遵循最小化原则,那么修正量应该刚好等于负延时量绝对值的最大值,即如式(8)所示:

4 仿真分析
4.1 参数设置
为了简化仿真,在不影响仿真结果的情况下忽略电离层延时、对流层延时和测量噪声量。仿真中,预设有6 颗卫星参与定位,接收机位于A 点,虚拟点位于B 点,干扰机处于T 点,假设它们在三维坐标系中的坐标如表1 所示。

表1 参数设置Table 1 Parameter setting
根据时延算法,为使处于A 点的目标接收机误定位于虚拟点B 处,各通道转发信号所需的延时量应该如表2 所示。
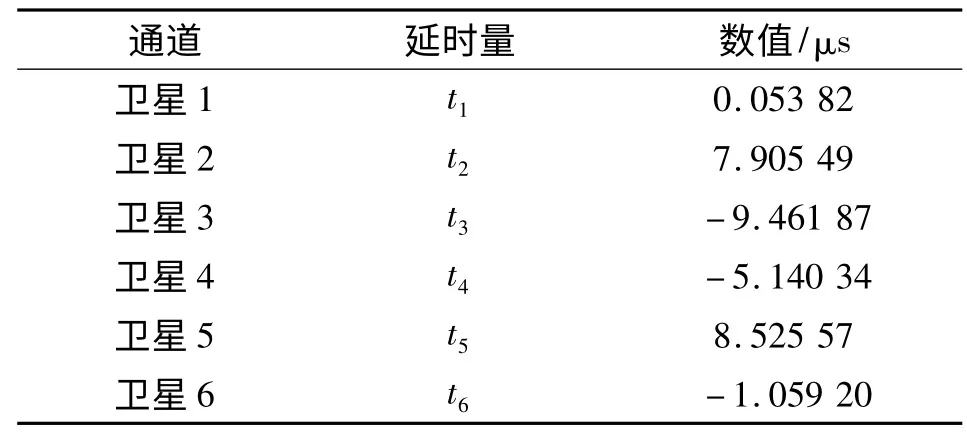
表2 转发信号所需延时量Table 2 Time-delay requirement of repeater signal
从表2 中可以看出,6 路转发信号中有3 路转发信号所需延时量为负值。虽然负延时在物理上无法实现,但在数学意义上,其实质是减小卫星到目标接收机的伪距。因此,可以对接收机定位解算模块进行仿真,研究在不同延时修正量的情况下,接收机解算得到的新虚拟点与原虚拟点的位置偏差。
需要说明的是,实际工程中,定位方程组中方程的个数一般多于4 个,属于超定方程,难以求得解析解,仿真的解算结果是利用牛顿迭代法和最小二乘法求得的数值解,数值解算的终止条件为前后两次数值之差小于10-6m,因此仿真结果会存在一定的数值计算误差。
4.2 延时修正量对接收机定位的影响
令延时修正量tΔ分别等于0、|t6|、|t4|、|t3|、0.000 05、0.000 1,得到的各通道转发信号所需延时量如图2 所示。

图2 修正后转发信号所需延时量Fig.2 Time-delay requirement of repeater signal after correction
将以上延时修正量分别添加到所有通道卫星转发信号中,得到的新虚拟点与原虚拟点位置偏差如表3 所示。

表3 所有通道延时修正后新虚拟点与原虚拟点位置偏差Table 3 Position deviation between new virtual point and original virtual point after time-delay correction for all signal channels
为了便于对比,将以上延时修正量分别只添加到单通道转发信号中,得到的新虚拟点与原虚拟点位置偏差如表4 所示。
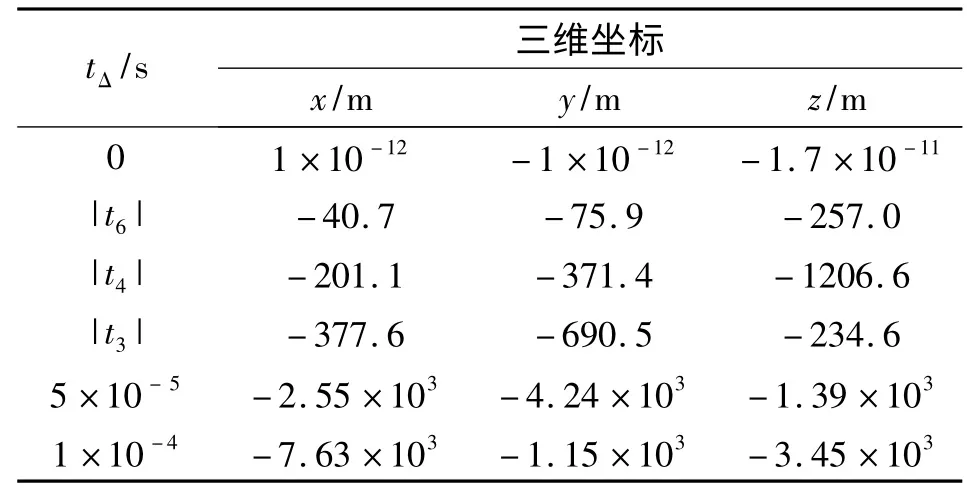
表4 单通道延时修正后新虚拟点与原虚拟点位置偏差Table 4 Position deviation between new virtual point and original virtual point after time-delay correction for single signal channel
将表3 与表4 进行对比可以发现,对所有通道进行延时修正后接收机解算得到的新虚拟点与原虚拟点B 的位置基本相同,偏差在10-12m 级别;但是只对单通道转发信号进行延时修正时,得到的新虚拟点与原虚拟点B 的位置偏差较大。另外,虽然当延时修正量tΔ分别等于0、|t6|、|t4|时,在数学意义上的仿真结果是可行的,但是从图2 中的(a)、(b)、(c)可以看出,部分通道中的转发信号延时量仍为负值,这在实际工程中是不允许出现的。
4.3 延时修正量对钟差的影响
根据表3 的仿真,在位置解算时可同时求得钟差,其随延时修正量的变化规律可表示为图3。
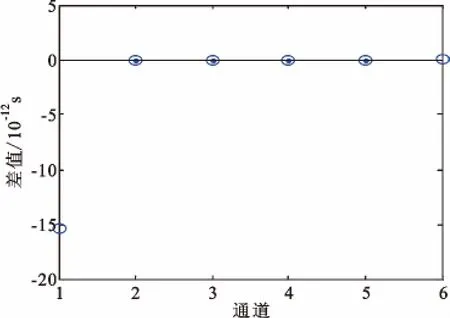
图3 钟差与延时修正量差值Fig.3 Difference between time-delay correction and clock-offset
根据图3 可知,6 个延时修正量的钟差与延时修正量的差值基本为零,可见钟差随着延时修正量同步变化。
从4.2 和4.3 节的仿真结果中可以得到以下两个结论:
(1)为所有通道转发信号进行相同延时修正后,接收机解算得到的新虚拟点与原虚拟点的位置基本不变,这表明在转发式欺骗干扰出现负延时需求的情况下可通过对所有通道转发信号的延时修正来消除负延时;
(2)当延时修正量小于负延时需求的最大绝对值时,虽然在数学意义上是可行的,但在物理意义上是无法实现的,因此延时修正量不能小于负延时需求绝对值的最大值。同时,定位钟差会随着延时修正量的增加而同步增加,易被目标接收机发现,因此延时修正量在满足负延时需求的情况下应该遵循最小化原则,即如式(8)所示。
5 结束语
本文基于转发式欺骗干扰的基本原理,分析推导了转发时延的基本算法;针对转发信号出现负延时需求的情况,提出了统一添加延时修正量的解决方法,并通过对接收机定位解算单元进行仿真,验证了方法的可行性,验证结果表明统一添加延时量不影响接收机最终的解算结果,但是接收机钟差会与延时修正量同步增长,为了避免钟差过大被接收机发现,延时修正量的选择应该在满足负延时修正的条件下遵循最小化原则。本文从理论上对卫星导航转发欺骗干扰中的负延时补偿方法进行了研究,并通过仿真验证了其合理性,但是该方法在工程中的具体实现还有一定难度,后续还需要进一步开展实践研究。
[1]赵晓东,马煦,瞿稳科.功率倒置算法在GPS 接收机天线抗干扰中的应用[J].电讯技术,2009,49(7):39-42.ZHAO Xiaodong,MA Xu,QU Wenke.Application of Power Inversion Arithmetic in Anti- interference Design of GPS Receiver Antenma[J].Telecommunication Engineering,2009,49(7):39-42.(in Chinese)
[2]宋洪涛.GPS 接收机抗干扰技术研究[D].哈尔滨:哈尔滨工程大学,2009:5-10.SONG Hongtao.Research on Technologies of GPS Receiver Anti- jamming[D].Harbin:Harbin Engineering University,2009:5-10.(in Chinese)
[3]LI H,ZHENG X.Method of jamming C/A code GPS receiver[J].Journal of Beijing Institute of Technology,2002,1(11):276-279.
[4]LYIDIR B,OAKAZANC Y.Jamming of GPS receivers[C]//Proceedings of the IEEE 12th Signal Processing and Communications Applications Conference.Kusadasi,Turkey:IEEE,2004:747-750.
[5]SOUMEKH M.SAR- ECCM using phase- perturbed LFM chirp Signals and DRFM Repeat Jammer Penalization[J].IEEETransactions on Aerospace and Electronic Systems,2006,42(1):191-205.
[6]石荣,易翔,王文松,等.时延伪GPS 卫星干扰的定位控制原理分析[J].电子对抗,2007(2):21-25.SHI Rong,YI Xiang,WANG Wensong,et al.Analysis on the Location Control Principle of Time Delay Pseudo GPS Satellites Jamming[J].Electronic Warfare,2007(2):21-25.(in Chinese)
[7]杨博,袁建平,岳晓奎.利用伪卫星干扰GPS 的可行性分析与仿真[J].火力与指挥控制,2007(11):111-113.YANG Bo,YUAN Jianping,YUE Xiaokui.Analysis and Simulation of GPS Jamming using Pseudolites[J].Fire Control and Command Control,2007(11):111- 113.(in Chinese)
[8]王伟,陶业荣,王国玉,等.GPS 欺骗干扰原理研究与建模仿真[J].火力与指挥控制,2009,34(6):115-118.WANG Wei,TAO Yerong,WANG Guoyu,et al.Study and simulation of GPS deception jamming[J].Fire Control and Command Control,2009,34(6):115-118.(in Chinese)
[9]张颂,杨景曙,潘高峰,等.诱偏暨导航一体化系统中诱偏时延算法[J].安徽大学学报:自然科学版,2011,35(1):64-68.ZHANG Song,YANG Jingshu,PAN Gaofeng,etc al.The Time-delay Algorithmic in GPS Area-mapping Deceiving unites Battlefield Navigation Integrative System[J].Journal of Anhui University(Natural Science Edition),2011,35(1):64-68.(in Chinese)
[10]闫占杰,吴德伟,刘海波,等.GPS 转发式欺骗干扰时延分析[J].空军工程大学学报:自然科学版,2013,14(4):67-70.YAN Zhanjie,WU Dewei,LIU Haibo,et al.Analysis of Time-delay in GPS Repeater Deception Jamming[J].Journal of Air Force Engineering University(Natural Science Edition),2013,14(4):67-70.(in Chinese)