基于实时定位的城市巷战训练系统
2015-12-20薛宪堂贺红卫蒋遂平
薛宪堂,贺红卫,蒋遂平,方 志
(1.中国航天科工集团第二研究院706所,北京100854;2.中国兵器科学研究院,北京100089)
0 引 言
传统的对城市巷战训练的官兵进行评价和效果分析时,需要教官和指导人员在各个场景观察或者场景巡视,这些都在一定程度上影响训练效果并且难以对参见训练的人员进行客观全面的评价。采用视频监控和回放的方法,难以在视频数据中提取有价值的可供参考的信息,而且耗费人力和时间[1,2]。
利用实时RFID 定位技术[1]记录士兵移动轨迹,并进行轨迹分析是一种有效方法。国外已经成功利用实时RFID定位等技术辅助城市巷战训练[4],训练效果直观可见,对整个训练效果的评估和对参见训练人员的评价提供客观全面的参考,并全方位的展示训练的效果。
通过实时RFID 定位技术,可以实现城市巷战训练系统的实时定位。本文将介绍该系统的架构及其中的关键技术问题。
1 城市巷战训练系统设计
城市巷战训练系统是一套由标签、读写器和摄像机等多种设备相互配合,多个软件模块协调工作的系统。该系统的设计以软件工程方法为设计理念,以实现场景功能需要为目标,实现系统开发的工程化,做到风险可规避、过程有规范、结果可验证。从实际应用的角度,城市巷战训练系统的设计应该具有安全性、稳定性、开放性以及便于升级维护等特点。
1.1 城市巷战训练系统总体架构设计
城市巷战训练系统采用3层构架设计,分别为:数据层、业务逻辑层和展示层,其中数据层和业务逻辑层通过数据访问接口进行通信。这种设计降低系统的耦合性,使得系统的各层次之间分工明确,缩短开发周期,降低开发成本,有利于系统的扩展和升级,使得系统硬件的差异和变化对上层软件系统的影响最小化,可以有效降低系统的维护成本。数据层主要完成对采集到的原始数据进行融合处理转变成业务逻辑层可用的数据形式;业务逻辑层通过数据访问接口获取数据的数据,并将这些数据处理成有城市巷战训练场景意义的数据;展示层从业务逻辑层取得数据并结合需要展示的要求将数据全方位立体化展示,以供教官评价训练效果。
城市巷战训练系统构架如图1所示。

图1 城市巷战训练系统构架
1.2 城市巷战训练系统关键技术研究
本文提出了基于实时定位技术的城市巷战训练系统研究。现有的技术和解决方案难以直接应用在系统中,需要对相关的技术进行适合城市巷战训练场景的改造。下面主要对实时定位技术、滤波技术和事件检查技术等这些关键技术的改进进行阐述说明。
1.2.1 改进的RFID 定位算法
目前的实时RFID 定位算法按照定位数据的不同分为:时间定位方法 (TOA)[5]、信号传播角度定位算法[6]、时间差定位方法[7,8]和RSSI定位方法 (场强法)[9]4类。其中时间定位法、信号传播角度定位方法和相位定位方法这些实时定位方法由于硬件要求高、价格昂贵等原因,导致实际应用难以推广。综合比较,RSSI室内定位算法可以实现较为高准确度定位的需求,系统的集成部署成本低廉,能够达到实际室内定位的需求标准,所以具体实施的室内定位系统普遍采取了RSSI定位技术。
LANDMARC[10]室内定位算法是一种基于动态有源RFID 标签的RSSI定位技术的具体实现,该算法是美国密歇根大学和香港科技大学一同研究得出的室内定位算法。LANDMARC算法在需要定位的空间内布置适当的以某一周期产生通信信号的参考标签,读写器不断的获取参考标签和待测标签的场强值,通过比对场强值的相似度来寻找与待测标签最为接近的参考标签,利用这些最近的参考标签的位置对待测标签进行定位。LANDMARC 算法的发布,引起了众多学者的兴趣,很多科研工作者在此算法基础上提出了诸多有效的改进方案。传统的LANDMARC 算法中如何选择最近邻居对定位精度的影响很大,由于无线电波传播过程中的反射、绕射和折射现象以及读写器定位的特性,即读写器所接收到的标签信号的场强值和读写器到标签之间的距离是有一定的单调性关系,所以读写器接收的某一强度场强值的参考标签呈现为近似圆周分布,在实际的寻找与待测标签距离接近的参考标签的过程中,很有可能会引入信号强度值接近但是实际位置较远的参考标签,场景中的多个读写器向量计算最近的参考标签方法,虽然可以改善选择的最近邻居,但是选择的最近邻居与待测标签位置较远的情况依然存在;而且,由于在选择最近邻居时,需要对已知区域内所有的参考标签进行特征向量计算,计算量巨大,这在一定程度上加重了系统的延迟时间和提高了对硬件的要求。
在城市巷战的环境下,目标的移动有自身的特点:目标运动的场景多数为楼宇和狭窄的街道,这些场景内各个相对封闭的运动单元之间的通道相对固定,可以利用这些通道对定位结果进行校正加强定位的精度,降低累计误差的影响。
城市巷战训练场景内环境如图2所示。
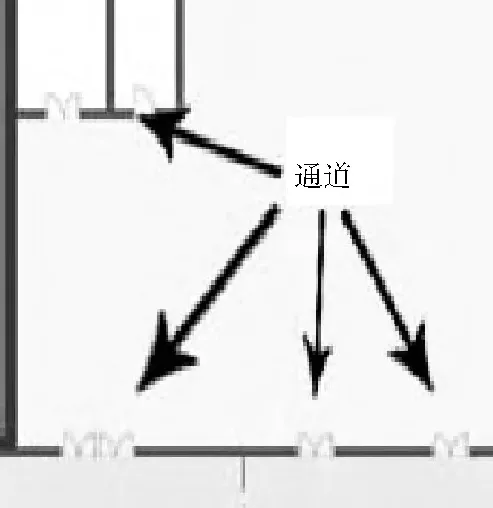
图2 城市巷战训练场景
巷战场景中移动的目标为训练的士兵,而士兵移动速度是有范围的,在定位时可以利用这一特点,限定下一位置目标出现的区域,并在这一区域内选取临近邻居参考标签进行定位。
综合以上特点,对传统的LANDMARC 算法进行改造,总体思想为:在场景内的单元进出位置进行校对验证,定位时利用T 时刻的位置和目标的移动速度预估T+1时刻的可能出现的位置区域,在这个区域内寻找最近邻居,从而提高了定位的精度和速度并减少计算量,并且在各个通道处进行定位的校验。
定位算法如图3所示。
1.2.2 滤波算法
在实际的应用过程中,根据改进的实时RFID 定位算法可以高效、准确的定位,但是由于士兵携带的通信设备的干扰以及士兵之间相互的干扰等原因会发生穿墙和跨越地形等错误现象,如图4所示,该现象是在定位间隔0.1s的情况下出现的,士兵在人类运动极限的情况下无法沿着两端点最近的路径运动到定位的位置。为消除和修正这类错误,增加滤波功能,滤波算法的目的就是判断识别出这些点,并将此类的点过滤掉。

图3 定位算法
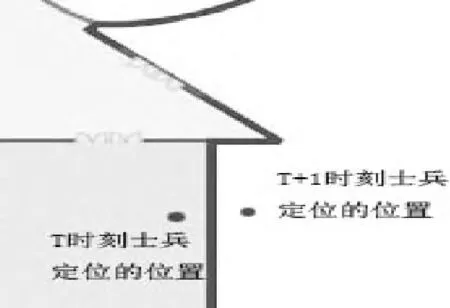
图4 定位穿墙
滤波算法的总体思路是:
(1)建立地形映射表。由于每一次定位的数据都需要滤波处理,所以需要映射的数据量很大,如果对每次映射都采用计算的方式获取该定位所在的地形并进行过滤识别,计算量所产生的延迟会难以令人承受,会严重影响实时性。因此,经过考证和实验,采取空间换时间的方案:在系统初始化时,建立一个局部地形的坐标到地形的映射表,这样每次的定位到坐标的转换,仅仅需要查表即可,加快了响应速度。
(2)定位位置映射到对应的地形。对于实时定位的计算出的坐标,进行适合查表的变换后,直接查表获得该点所在的地形。
(3)对于处于不同地形的定位,依据地形寻找两点间最近的路径,并判断沿最近路径到达定位点的可能性。针对本场景的实际情况,在寻找两点的路径时,都是通过通道连接的,在系统初始化时,先建立通道的相邻表,依据路径节点驱动的低代价最短路径树算法寻找最近路径[11];计算沿最短距离行进所需的时间,判断改点定位的可行性。
(4)根据是否可行,设置下一定位的影响参数,下一定位点可能出现区域的半径,参照的上个准确点等。
1.2.3 事件检测
事件检测中采用SASE[12]事件描述语言,该语言支持复杂事件处理查询,是目前RFID 事件处理中较为常见的方法。SASE所处理的原始RFID 事件和城市巷战场景处理的数据有所不同。SASE 所处理的原始事件格式为<Rid,Tepc,t>其含义见表1。
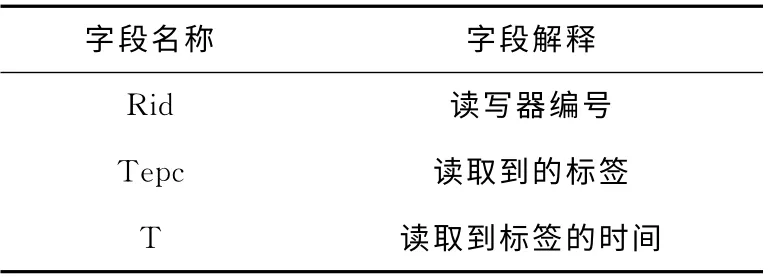
表1 原始事件字段
在城市巷战场景中,原始的RFID 信息用来对标签进行定位,上层事件的检测可以直接利用定位的信息,这样减轻了事件检测模块的负担,同时也使得事件检测更贴近于城市巷战场景。所以在城市巷战场景中,处理的基础事件格式为<Tepc,X,Y,Zone,t,Extra>,基础事件各个字段含义见表2。

表2 改进的基础事件字段含义
城市巷战训练场景中的事件主要包括:伤亡士兵违规、作战计划施行有误、脱离训练现场和危险区域误入等4类事件。城市巷战训练系统中主要以这4类事件为基础,进行检查并将结果传递到上层应用。
根据修改的SASE 描述语言的语义,下面对着4 类事件,进行定义:
(1)伤亡士兵违规事件:
EVENT ALL x
WHERE x.Tepc in (casualties)^Distance(x.X,x.Y,GetCasualtyLocation(x.Tepc))<LocationThreshold
RETURN CasualtiesError(x.Tpec,x.X,x.Y,Extra)
伤亡士兵违规是指伤亡的士兵出现移动等现象,在检测时首先判断标签是否在伤亡列表casualties中,然后通过GetCasualtyLocation函数获得标签的伤亡地点,在计算伤亡地点与现在地点的距离是否超过LocationThreshold士兵的移动门槛。对于满足伤亡士兵违规事件的通过CasualtiesError函数将数据组装发往上层应用。
(2)作战计划施行有误事件:
EVENT ALL x
WHERE x.Tepc in (warPlan)^
GetWarPlan(x.Tpec)+WarPlanThreshold<x.t^
Distance(x.X,x.Y,GetWarPlanLocation(x.Tepc))<LocationThreshold
RETURN WarPlanError(x.Tpec,x.Extra)
在城市巷战训练时,往往训练前会有一定的部署和作战计划,对于训练的士兵要求在规定的时间内抢占有利位置,团队配合行进等要求。抢占有利位置事件的事件检测是指在一定的时间段内检测是否有规定的标签出现在预设的区域上。对于数据流中的信息,先判断该标签所指示的士兵是否在warPlan列表中,然后判断是否到了作战计划时间,最后判断是否在指定的位置上。
(3)脱离训练现场事件:
EVENT SEQ(!ALL x)
WITHIN 10Seconds
RETURN OutOfTraining(x.Tepc)
在城市巷战训练中有些士兵会由于各种原因脱离训练现场,该事件实时的检测出该类士兵,给训练评估人员以提醒。脱离训练现场事件的检测是寻找10s内,没有被侦探到的数据。
(4)危险区域误入事件:
EVENT ALL x
WHERE IsInDangerZone(x.X,x.Y)
RETURN DangerZoneIntrude(x.Tepc,x.X,x.Y,x.Extra)
在实际的城市巷战战斗中,有些区域是敌方布置的陷阱或者化学毒气区域等,这些危险的区域对我军士兵的战斗力影响很大,通过这类的训练可以提高士兵的警觉意识。
2 应用验证
功能实现采用C#语言,开发工具软件选用Microsoft Visual Studio 2010,在ASP.NET 平台上进行开发,选 用微软SOL Server 2008数据库作为数据存储数据库。该研究的成果已经成功的应用在城市巷战训练系统中,在城市巷战训练系统的实现中,利用关键技术的解决方案,调用模块化的定位模块、滤波模块和事件监测模块的相关接口即可。实际应用结果表明:改进后的定位算法,定位准确,计算量小;滤波合理准确;事件检测效率高,误报率低。整体系统响应延迟小,能够准确定位,全方位立体展示巷战训练效果,为评估和比较训练效果提供了依据。
城市巷战训练系统界面如图5所示。
城市巷战训练系统楼层内显示如图6所示。
城市巷战训练系统楼层编辑界面如图7所示。
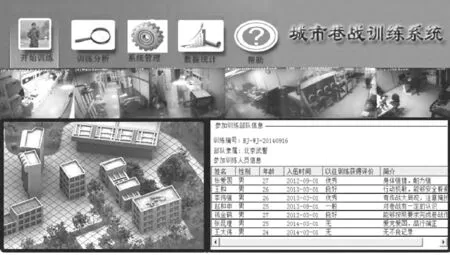
图5 城市巷战训练系统界面

图6 城市巷战训练系统楼层内显示
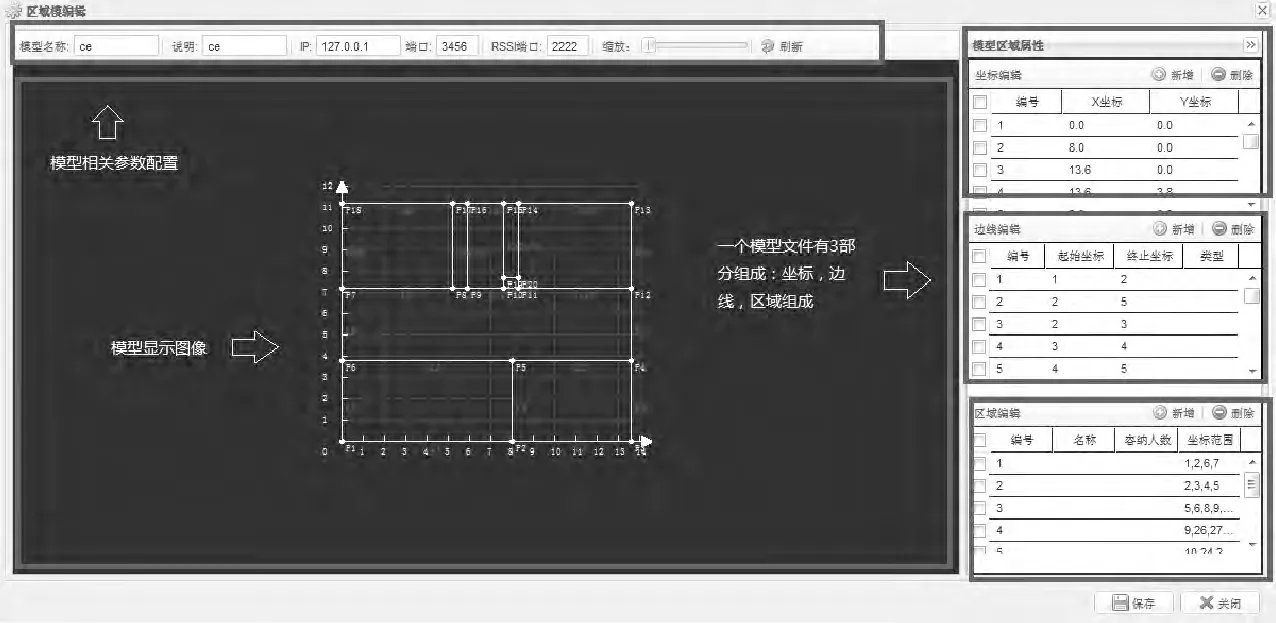
图7 城市巷战训练系统楼层编辑界面
3 结束语
本文提出了在城市巷战训练场景中的实时RFID 定位的技术,针对该场景的滤波技术和城市巷战训练的事件检测技术,填补了国内在城市巷战训练场景中实时RFID 定位和事件检测技术研究的空白。研究以巷战训练为背景,结合已有的相关研究成果,对关键技术进行了分析研究,提出延迟小、定位效率高、检测准确的技术方案。将该技术应用在实际的城市巷战训练系统中,表明了该研究结果的可行性。下一步的研究工作是完善实时RFID 定位技术和事件检测技术,使其扩展应用范围。
[1]DU Wenlong.City,ground war,main battlefield [J].Weapon Knowledge,2012,10 (1):10 (in Chinese).[杜文龙.城市未 来20 年 陆 战 主 要 战 场 [J]. 兵 器 知 识,2012,10(1):10.]
[2]ZHOU Bin.Illustrate the sharp weapon the street battle [J].Modern weapons,2007 (11):54-57(in Chinese).[周斌.图说战争利器之城市巷战[J].现代兵器,2007 (11):54-57.]
[3]RFID world.Nor-Lea hospital district to enhance ED and clinic patient flow with versus RTLS [EB/OL].[2014-01-08].http://news.rfidworld.com.cn/2014_01/40cc40cea318753f.html(in Chinese).[RFID 世界网编辑.Nor-Lea医院使用Versus的RTLS以提高病 人接 待量[EB/OL].[2014-01-08].http://news.rfidworld.com.cn/2014_01/40cc40cea318753f.html.]
[4]Claire Swedberg.Urban warfighters train with RTLS [EB/OL].[2014-01-15].http://www.rfidjournal.com/articles/view?11343.
[5]Alsindi N,Xinrong L,pahlavan K.Analysis of time of arrival estimation using wideband measurements of indoor radio propagations [J].IEEE Transaction,Instrument Ationand Measu-Rement,2007 (5):1537-1545.
[6]Zhou Junru,Zhang Hongjian,Mo Lingfei.Two-dimension localization of passive RFID tags using AOA estimation [C]//IEEE International Instrumentation and Measurement Technology Conference,2011:1-5.
[7]Hao N,Guangliang R,Yilin C.A TDOA location scheme in OFDM based WMANS [J].IEEE Transaction,Consumer Electronics,2008 (3):1017-1021.
[8]Kuhn M,Cemin Z,Merkl B,et al.High accuracy UWB localization in dense indoor environments [C]//IEEE International Conference on Ultra-Wideband,2008:129-132.
[9]Rong-Hou W,Yang-Han L,Hsien-Wei T,et al.Study of characteristics of RSSI signal[C]//IEEE International Conference on Industrial Technology,2008:1-3.
[10]Kyuwon Han,Sung Ho Cho.Advanced LANDMARC with adaptive k-nearest algorithm for RFID location system [C]//Beijing,Network Infrastructure and Digital Content,2010:595-598.
[11]ZHOU Ling,WANG Jianxin.Path nodes-driven least-cost shortest path tree algorithm [J].Journal of Computer Research and Development,2011,48 (5):721-728 (in Chinese).[周灵,王建新.路径节点驱动的低代价最短路径树算法 [J].计算机研究与发展,2011,48 (5):721-728.]
[12]Gyllstrom D,Wu E,Chae HJ,et al.SASE:Complex event processing over streams[C]//Proceedings of the 3rd Biennial Conference on Innovative Data Systems Research,2007:108-119.