基于运动控制器的苹果质量分级系统
2015-12-20吴晓强黄云战赵永杰内蒙古民族大学机械工程学院内蒙古通辽08000云南农业大学工程技术学院云南昆明6500昆明铁道职业技术学院云南昆明65008
吴晓强 黄云战 赵永杰(.内蒙古民族大学机械工程学院,内蒙古 通辽 08000;.云南农业大学工程技术学院,云南 昆明 6500;.昆明铁道职业技术学院,云南 昆明 65008)
苹果质量分级是一项重要的加工环节,产后质量分级技术落后是造成中国苹果贸易水平低下的一个重要的原因,分级处理后的烂果率高达25%以上,对苹果整体价值造成了重大的影响[1]。
常用的苹果分级方法有人工分级和机械分级两种[2]。目前中国应用比较普遍的是人工分级。人工分级结果偏差较大,同时劳动强度大、效率低[3];现阶段的机械分级一般根据苹果的直径大小或者是苹果的重量进行质量分级。这种分级方式可以减少劳动量,提高劳动效率,但是这类机械通常采用孔或缝隙进行筛选,很容易造成苹果果皮擦伤、压伤等[4]。
机器视觉技术是先采集到待测物的图像信息,将待测物的图像进行处理,消除待测物表面反光带来的影响,再对其进行阈值处理,找到损坏点,建立分级模型[5]。机器视觉技术的特点是速度快、功能多、信息量大,可以进行非接触检测[6]。早在20世纪90年代就有了基于视觉技术在红枣分级方面的相关研究[7],近年来,机器视觉系统在农业上的应用逐渐增加[8-10],有着广泛的前景。分级设备的控制系统是保证分级质量的关键,传统分级设备多采用单片机控制[11,12],但是单片机抗干扰能力差、可靠性低、可扩展性差,不能保证苹果分级的质量和精度。机器视觉系统可以克服接触式系统对苹果造成的损害[13,14],为了提高苹果质量分级的精度,保证分级后的苹果的质量,拟设计基于运动控制器和机器视觉系统的自动苹果质量分级系统,通过图像处理选择合格的苹果,由运动控制器进行分级的执行控制。
1 工作原理
1.1 分级系统
苹果质量分级系统主要由定向装置、机器视觉系统、红外检测模块、运动控制模块、称重模块、电机模块、分级模块几部分组成,见图1。V代表传送带运动方向,苹果在传送带上匀速前进,到达机器视觉系统之前触发红外检测模块1;机器视觉系统开始工作,对苹果的状况进行反馈,并将结果输入到运动控制器中,经运动控制器分析后传入计算机,经过处理的苹果如果有缺陷则直接剔除;没有缺陷的苹果继续前进,触发红外检测模块2,运行到称重模块进行称重,根据不同的质量运动控制器做出判断,控制执行机构对其进行分级。从而实现准确、高效的苹果质量分级。
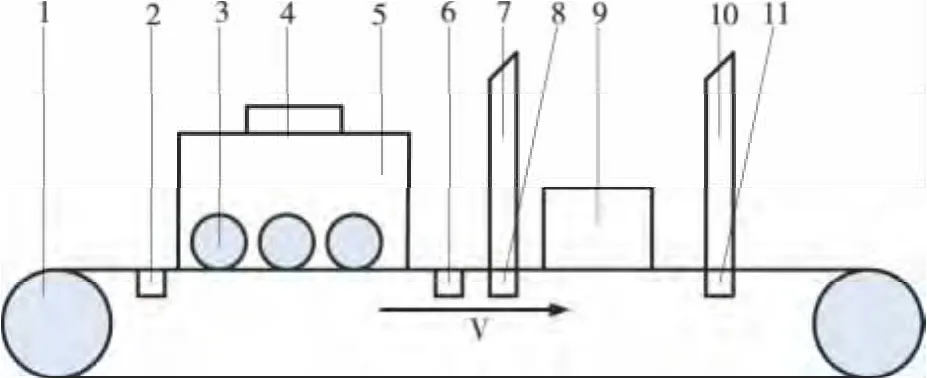
图1 分级系统示意图Figure 1 Classification system schematic diagram
1.2 控制方案
苹果质量分级系统工作流程见图2,根据要实现的功能,采用以“PC机+运动控制器”的方式对该分级系统进行控制,采用红外传感器对苹果的运动状态进行检测,将检测结果传递到运动控制器中进行分析,运动控制器根据分析结果控制相应装置进行工作。首先剔除不合格苹果,再将合格苹果进行质量分级,控制方案见图3。
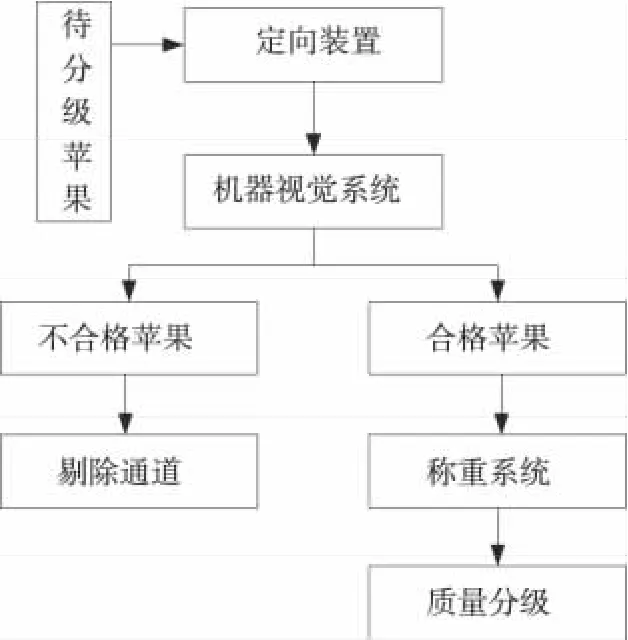
图2 分级系统工作流程Figure 2 Grading system workflow

图3 控制方案Figure 3 The control scheme
2 机器视觉系统
机器视觉系统多以计算机为处理核心,主要由视觉传感器、视觉采集和处理系统组成,见图4。该分级系统由传送带、CCD摄像机、图像采集室、图像采集卡、计算机等构成。在运行过程中,苹果经过红外检测模块1,触发该模块后的机器视觉系统工作,对每一个苹果外表进行检测,CCD摄像机在传送带上方,有苹果通过时就可以通过图像采集卡将苹果的图形进行采集并传入计算机中。

图4 机器视觉系统Figure 4 Machine vision system
在机器视觉系统中,光源背景的选择和光源的布置对成像质量和效率都有着重要的影响。光源的背景主要是要使苹果的成像快速、清晰,经过对比研究,本研究采用黑色背景。光源布置的合理性直接影响着图像形成的质量和效率。在实际应用中,要求图像采集室内的光源均匀布置,这样才能保证均匀的反射特性,光源布置见图5。
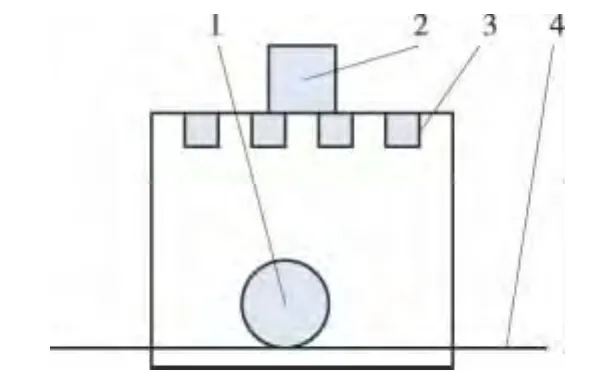
图5 光源布置Figure 5 Light source setting up
3 称重和分级模块
3.1 称重模块
系统根据称重模块的称重结果对苹果进行分级,称重模块主要包括红外传感器、质量传感器和执行机构。由于质量传感器的输出电压信号较小,在读入运动控制器之前还需进行信号放大,放大后的电压信号是模拟信号,还需通过A/D转换器对其信号进行转换,将模拟信号转换为数字信号,数字信号输入到运动控制器中,运动控制器根据不同的信号控制执行装置将苹果送到相应的通道中。
红外传感器放置在质量传感器前端,输出线与运动控制器的IN20引脚连接。苹果经过传送带的输送首先触发红外传感器,运动控制器接收到一个低电平信号,运动控制器控制质量传感器开始工作。为了得到更准确的结果和更快的响应速度,质量传感器的量程选择为最大500g。由于质量传感器的输出信号较小,本试验采用LFC2放大器对其输出信号进行放大,放大后的信号经过A/D转换变为运动控制器可以接收的信号。需要注意的是,由于苹果运动到质量传感器上时会产生一个瞬间的冲击,如果此时对信息进行采集会产生一定的误差,为了提高准确率,需要对其进行延时处理。
为了准确直观地观察苹果的质量,称重模块的信息还可以通过PC进行实时显示。
3.2 分级模块
苹果经过称重模块后产生相关质量信息,运动控制器对质量信号进行分析,确定需要的通道,电机执行相应操作,将苹果移动到相应的通道中,实现分级功能。运动控制器轴0与电机1连接,用来将苹果移动到相应的通道前。运动控制器轴1与电机2连接,用来将苹果拨到相应的通道中。
4 软件设计
该苹果质量分级系统中运动控制器采用Trio MC206,其软件由运动控制器自带编程软件“Motion Perfect”进行编写,软件采用模块化方式进行程序的编写,其中包括检测模块、采集与处理模块、报警模块、显示模块、运动模块等。该软件设计流程图见图6。

图6 软件设计流程图Figure 6 The flow chart of software design
5 验证结果
本系统对山东烟台某地区的苹果进行了分级验证,按照企业对苹果的分级分为特优级、优级和良级3个等级,其中优级所占比重最大,苹果颜色主要以红色为主,有部分是偏黄色的。随机抽取该系统分级的和人工分级的苹果各1箱(大约50个)进行对比,误差不超过3%,说明该系统可以替代人工进行苹果质量分级。按照中国对苹果分级的要求(GB/T 23616—2009)进行工作该系统生产效率可达2~5t/h,并可根据实际需求使用多套系统协同进行工作,极大地提高了生产效率,还可以保证分级质量。
6 结束语
本试验针对现阶段苹果分级中存在的问题,设计了一种基于运动控制器和机器视觉系统的苹果质量分级系统。机器视觉系统克服了以往机械式接触对苹果会造成损害这一缺点;运用运动控制器作为控制核心,调试方便,系统响应快,可以克服单片机作为控制系统核心带来的问题。通过机器视觉技术检测苹果信息,利用运动控制器对分级设备进行控制是苹果质量分级的一个新的发展方向,实验证明,分级误差在允许范围内,效率可达到2~5t/h。系统具有开放性和扩展性,未来可以通过对硬件的扩展来拓展系统的工作范围,可以将系统应用于更多的农产品中。
1 张方明,应义斌.水果分级机器人关键技术的研究和发展[J].机器人技术与应用,2004(1):33~37.
2 龙满生,何东健,宁纪锋.基于遗传神经网络的苹果综合分级系统[J].西北农林科技大学学报(自然科学版),2001(6):108~111.
3 周晓蓉,黎培辉,杨坚.柑橘人工分级的误差分析[J].农机化研究,2010(4):30~33.
4 周钦红,张东兴.苹果分选机输送定位机构的设计[J].中国农业大学学报,2005(5):45~48.
5 应义斌,赵匀.机器视觉技术在农产品品质自动识别中的应用(Ⅰ)[J].农业工程学报,2000,16(1):103~108.
6 应义斌,章文英,蒋亦元,等.机器视觉技术在农产品收获和加工自动化中的应用[J].农业机械学报,2000,31(3):112~115.
7 黄应任,李芳繁.使用影像分级进行枣子分级之研究[J].农业机械学报,1997,6(2):15~23.
8 王荣本,纪寿文,初秀民,等.基于机器视觉的玉米施肥智能机器系统设计概述[J].农业工程学报,2001,17(2):151~153.
9 田绪顺,李景彬,坎杂,等.基于机器视觉的红枣双面检测分级装置设计[J].食品与机械,2012,28(5):138~140.
10 施健,何建国,张冬,等.基于计算机视觉鲜枣大小分级系统研究[J].食品与机械,2013,29(5):134~137.
11 薛忠,邓干然,崔振德,等.基于机器视觉的澳洲坚果分级研究[J].农机化研究,2010(5):26~28.
12 鲁永萍,郁志宏,郝敏.基于单片机控制的马铃薯质量分级系统的研究[J].农机化研究,2014(1):136~138.
13 段峰,王耀南,雷晓峰,等.机器视觉技术及其应用综述[J].自动化博览,2002(3):35~38.
14 唐向阳,张勇,李江有,等.机器视觉关键技术的现状及应用展望[J].昆明理工大学学报(理工版),2004(2):24~27.
