基于Solidworks Motion的番茄收获机测产装置的运动学仿真分析
2015-12-20袁昌富张宏文马万里陈明昌石河子大学机械电气工程学院新疆石河子832000
袁昌富 张宏文 马万里 王 磊 陈明昌(石河子大学机械电气工程学院,新疆 石河子 832000)
番茄收获机测产装置,是和番茄收获机相配套,进行番茄产量实时监测并获取产量数据的装置,是实现番茄收获实时测产的自动化、智能化和信息化的保证,也是精准农业中实时获取作物产量分布信息,并为处方农作和科学管理提供重要参考的保障[1-4]。
称量精度是测产装置最重要的性能指标之一,在测产装置动态称重过程中,如果番茄在称重皮带有效称重段发生滚动或者碰撞,会产生不必要的惯性力、摩擦力、弹力等重力以外的力,影响测产装置的称量精度。为此,在进入称重皮带有效称重段前端设置缓冲区域,若番茄从色选皮带抛下后,在缓冲区域内与称重皮带不发生相对滚动,或者完成相对滚动后与称重皮带同速进入有效称重段,此时对称量精度影响较小;若番茄进入有效称重段后继续滚动,需及时调整色选皮带的运行速度以降低番茄落入称重皮带的初始速度。
目前,中国番茄收获的机械化程度虽然正在不断普及和提高,但番茄收获实时测产技术在中国的应用研究尚属空白。本试验利用Solidworks Motion工具对番茄在称重皮带的运动进行模拟研究,通过调整色选皮带运动速度以尽量减少番茄运动对称量精度的影响,对于提高番茄收获实时测产装置的称量精度意义重大。
1 运动学理论分析
(1)当相对速度Δv=v0-v>0时,番茄在称重皮带上的受力分析如图2所示,则有以下几种情况:
若f>Ff,番茄在称重皮带上不发生相对滚动,即番茄被抛送到称重皮带上时就随称重皮带稳定前行,速度为v,那么v0应满足:
若f<Ff,番茄在称重皮带上相对称重皮带会向前滚动一段距离,在摩擦力作用下直到番茄速度减小为v时,番茄才随称重皮带稳定前行。在此过程中有:

式中:
a1——番茄在滚动过程中发生减速时的加速度,m/s2;
t1——番茄发生减速过程的时间,s;
S1——番茄在称重皮带上相对滚动的距离,m;
S2——番茄在发生减速过程中称重皮带前行的距离,m。
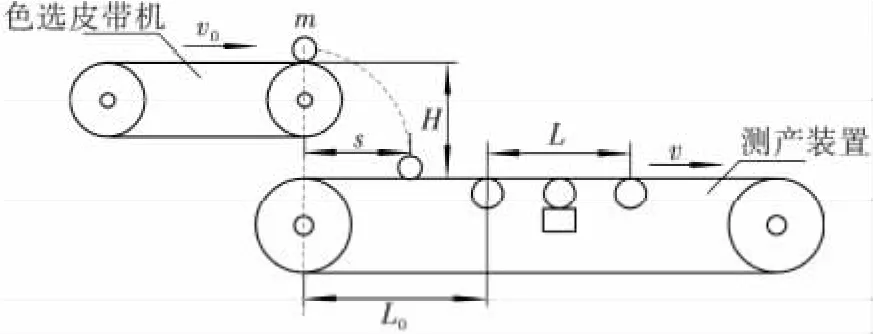
图1 番茄运动过程简图Figure 1 The movement of the tomato
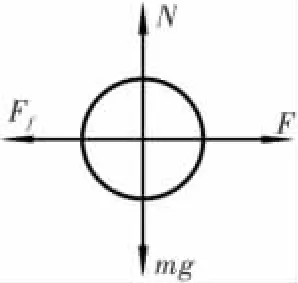
图2 番茄受力分析图Figure 2 The force analysis of the tomato
综合分析,色选皮带运行速度v0必须满足:
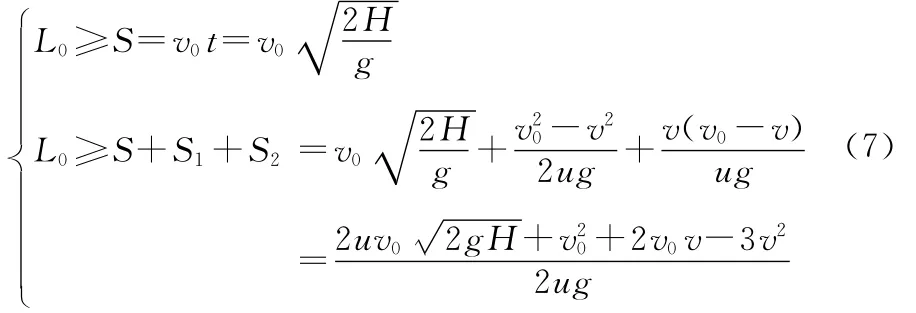
即

解得

(2)当相对速度Δv=v0-v<0时,番茄在称重皮带上的受力分析如图3所示,则有以下几种情况:
若f<Ff,番茄在称重皮带上相对称重皮带会向后滚动一段距离,在摩擦力作用下直到番茄速度增大为v时,番茄才随称重皮带稳定前行。在此过程中有:
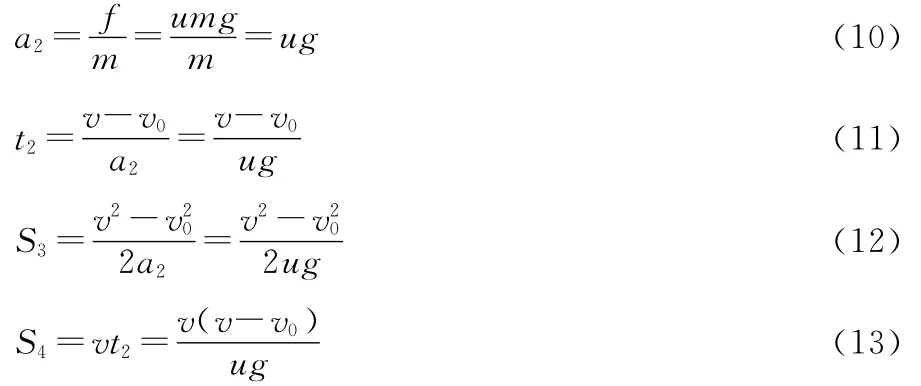
式中:
a2——番茄在滚动过程中发生加速时的加速度,m/s2;
t2——番茄发生加速过程的时间,s;
S3——番茄在称重皮带上相对滚动的距离,m;
S4——番茄在发生加速过程中称重皮带前行的距离,m。
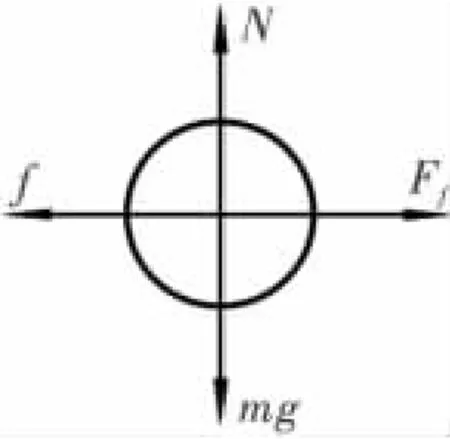
图3 番茄受力分析图Figure 3 The force analysis of the tomato
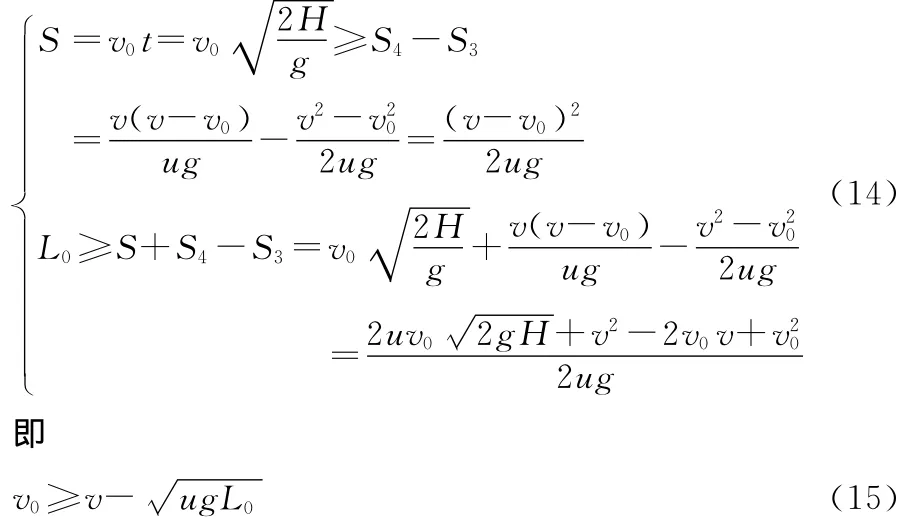
综合分析,色选皮带运行速度v0必须满足:
若f>Ff,番茄在称重皮带上不发生相对滚动,即番茄被抛送到称重皮带上时就随称重皮带稳定前行,速度为v,那么v0应满足:
(3)当相对速度Δv=v0-v=0时,番茄在称重皮带上的受力分析如图4所示,此时f=Ff=0,所以番茄在称重皮带上不发生相对滚动,那么v0应满足:

即

图4 番茄受力分析图Figure 4 The force analysis of the tomato
综上所述,v0的取值范围应该为:

2 运动仿真
2.1 仿真插件Motion介绍
Motion是Solidworks中功能较为强大的运动仿真分析模块,Motion插件无缝集成了装配运动仿真、干涉检查等实用功能,通过Motion运动仿真分析,可以有效降低产品的制造成本及缩短产品开发周期,设计分析者可快速地了解产品的可行性[7]。
在Motion的运动仿真界面中,只需简单的操作,便可完成对装配体的运动仿真与分析。在装配好的整机上,利用Motion对装配体添加相应的驱动、约束、力、弹簧、阻尼、接触与碰撞等,并设定好运动初始条件和具体参数,即可实现对该装配体的运动仿真分析,最后的仿真结果(如零部件运动轨迹、位移、速度、加速度、作用力、反作用力等)以动画、图形、数据等多种形式输出[7-9]。
2.2 基于Motion的运动仿真
图5为番茄收获机测产装置番茄运动仿真所建立的仿真模型。
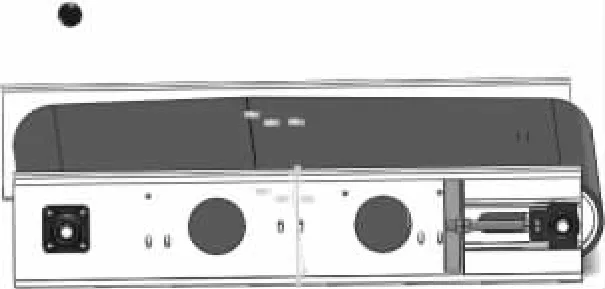
图5 运动仿真模型Figure 5 The simulation model of motion
(1)在仿真模型中,给番茄添加Y方向的引力,让其离开色选皮带后能够做平抛运动掉落到测产装置的称重皮带上,符合试验中的实际情况,见图6。
(2)给测产装置称重皮带添加线性马达(图7),并设置好添加马达的位置、方向、相对此项而移动的零部件、运动函数和速度大小(经分析,当测产装置称重皮带的速度越小时,其称量精度越高,因此设置其运转速度为最小值1m/s),点击计算运动算例后称重皮带能够顺利的运转起来。

图6 添加引力Figure 6 The adjunction of gravity

图7 添加马达Figure 7 The adjunction of motor
当番茄从色选皮带上抛落到测产装置称重皮带上时,为防止运动过程中零部件之间的彼此穿刺和彼此嵌入,因此需在番茄与称重皮带之间添加实体接触(图8),并设置好接触参数(材料、动摩擦速度、动摩擦系数、静摩擦速度、静摩擦系数、弹性恢复系数等)。
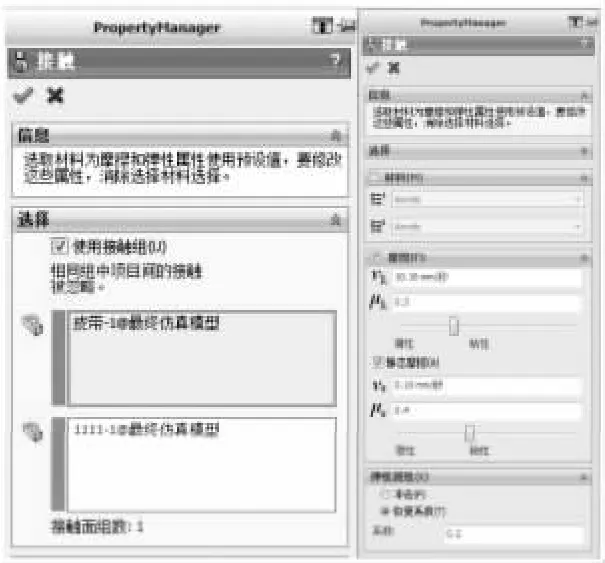
图8 添加接触Figure 8 The adjunction of touching
(3)给番茄设置初始速度v0=0,1 000,1 350m/s(图9),观察其掉落在称重皮带上以后的滚动运行情况,并通过运动分析找出番茄未进入称重皮带有效称重段时,向后发生相对滚动但不脱离称重皮带和番茄进入称重皮带有效称重段内不发生相对滚动的初始速度的临界条件。
图9 初始速度的设定(v0=0m/s)Figure 9 The setting of initial speed
3 仿真结果分析
运动仿真分析完成后,在“图解和结果”中选取“线性速度”和“线性位移”,点击“生成新图解”,确认后可以计算仿真分析结果,并且可生成番茄整个运动过程线X方向上线性速度和线性位移相对于时间的数据图表,见图10。当番茄的初始速度为1 350mm/s时,其X方向上线性速度和线性位移相对于时间的数据图像见图11。
图10 运动分析结果选取(线性速度v相对于时间t)Figure 10 The selection of motion analysis results(v—t)
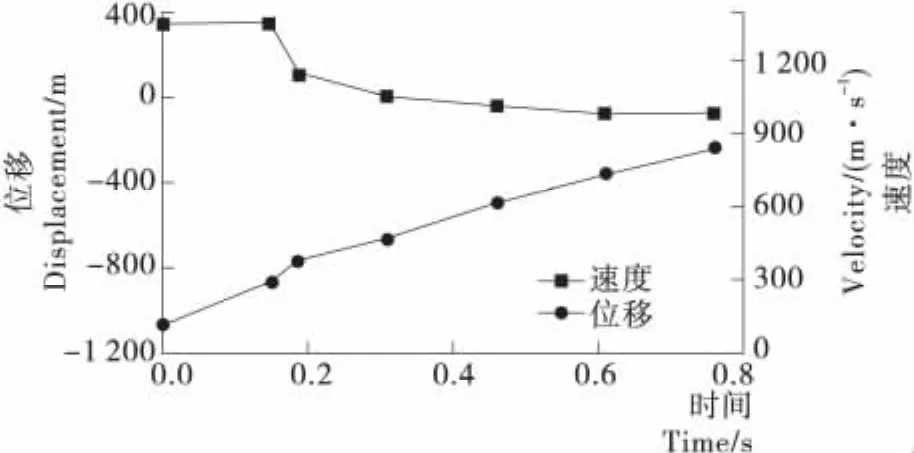
图11 番茄初始速度为1 350mm/s时的X方向上线性速度与位移Figure 11 The linear velocity and displacement on direction Xwith tomato initial velocity of 1 350mm/s
由图11可知,当运行时间t=0.19s时,番茄的平抛运动恰好结束并掉落到称重皮带的缓冲区域内,同时匀减速运动开始,说明在此过程中番茄相对于称重皮带向前滚动;当t=0.42s时,番茄的匀减速运动结束,匀速运动开始,此时对应的线性位移为500mm,与缓冲区域的长度恰好相等,说明番茄在进入称重皮带有效称重段的瞬间由匀减速运动转变为同称重皮带等速的匀速运动,此时的线性速度大小可作为番茄进入称重皮带有效称重段内不发生滚动的右端临界条件。
当番茄的初始速度为1 000mm/s时,其X方向上线性速度和线性位移相对于时间的数据图像见图12。
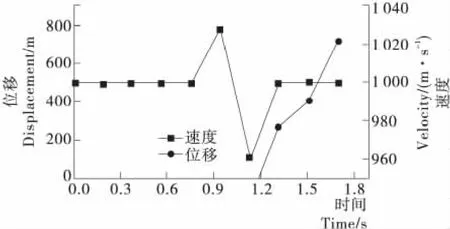
图12 番茄初始速度为1 000mm/s时的X方向上线性速度与位移Figure 12 The linear velocity and displacement on direction Xwith tomato initial velocity of 1 000mm/s
由图12可知,番茄平抛掉落到称重皮带上后做匀速运动,即在称重皮带上没有发生相对滚动就直接进入了称重皮带有效称重段。
当番茄的初始速度为0mm/s时,其X方向上线性速度和线性位移相对于时间的数据图像见图13。
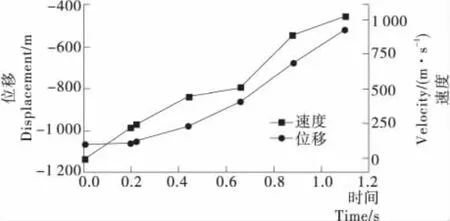
图13 番茄初始速度为0mm/s时的X方向上线性速度与位移Figure 13 The linear velocity and displacement on direction Xwith tomato initial velocity of 0mm/s
由图13可知,当运行时间t=0.19s时,番茄的平抛运动恰好结束并掉落到称重皮带的缓冲区域内,同时匀加速运动开始,说明在此过程中番茄相对于称重皮带向后滚动;当t=1.00s时,番茄的匀加速运动结束,匀速运动开始,此时对应的线性位移为420mm,小于缓冲区域的长度,说明番茄在进入称重皮带缓冲区域以前就由匀加速运动转变为同称重皮带的匀速运动,此时的线性速度大小可作为番茄未进入称重皮带有效称重段时向后发生相对滚动但不脱离称重皮带的左端临界条件。
综上所述,当番茄的初始速度范围在0mm/s≤v0≤1 350mm/s时,番茄在称重皮带有效称重段不发生相对滚动,此时对测产装置的称量精度影响较小。
4 结论
(2)通过运动仿真分析,确定了番茄未进入称重皮带有效称重段时向后发生相对滚动,但不脱离称重皮带;番茄进入称重皮带有效称重段内不发生相对滚动,这两种情况下番茄的初始速度的临界条件v0为0mm/s≤v0≤1 350mm/s。
(3)本研究并未考虑称重皮带表面形状对番茄称量精度的影响,测产装置可选用表面形状为大小均匀方格状的称重皮带,对掉落到称重皮带上的番茄可以起到固定和缓冲的作用,可保证番茄在称重皮带上不发生相对滚动或者撞击,从而进一步提高测产装置的称量精度。
1 张宏文,陈明昌,王磊,等.番茄收获机测产装置:中国,CN103759795A[P].2014—04—30.
2 陈明昌,魏敏,刘巧,等.番茄收获机测产装置的设计[J].食品与机械,2014,30(5):151~153,157.
3 李光乐.FFS包装机伺服电子定量秤研究[J].食品与机械,2013,29(4):118~121.
4 林鑫洁,马蓉,安光辉,等.基于CAN总线的棉花在线测产系统设计[J].农机化研究,2013(4):179~182.
5 董云峰,崔亚平.理论力学[M].第2版.北京:清华大学出版社,2010.
6 胡文绩.理论力学[M].武汉:华中科技大学出版社,2010.
7 韩锐.基于SolidWorks的机构运动仿真研究[D].西安:西安理工大学,2004.
8 谢昱北,许晔.SolidWorks2007中文版机械设计与典型范例[M].北京:电子工业出版社,2007.
9 蔡文书,程志红,沈春丰.基于SolidWorks的液压支架三维建模和运动仿真[J].煤矿机械,2008,29(11):165~167.
