一种骨骼细胞动态压缩载荷发生装置的设计
2015-12-20罗二平申广浩王天博翟明明佟世超
刘 戈,罗二平,申广浩,王天博,翟明明,佟世超,景 达
一种骨骼细胞动态压缩载荷发生装置的设计
刘 戈,罗二平,申广浩,王天博,翟明明,佟世超,景 达
目的:设计一种小型、便携且简单可控的体外细胞压应力加载装置,能够用于骨骼细胞力学信号转导的实验研究。方法:首先,利用SolidWorks进行装置的外观图绘制,采用聚甲基丙烯酸甲酯材料设计该加载装置,该材料具有良好的热传导性能;其次,通过基于个人计算机(personal computer,PC)端的LabVIEW软件控制单元控制运动控制卡驱动电动机驱动器,保证电动机获得精确的运动控制;最后,通过数据采集卡在基于PC端的LabVIEW采集单元实时采集压力传感器输出的压力信号,并进行数据的实时显示和存储。结果:该小型化装置在实验中能够置于细胞培养箱中,从而可以保证在适宜的细胞生长环境中进行力学信号转导实验,提高实验的稳定性和可重复性;该装置具有良好的工作稳定性,通过LabVIEW控制端程序,可以实现对伺服电动机动作的精确控制和对应力数据的精确采集。结论:该空气动态载荷发生装置具有小型、便携等优势,对于骨骼细胞力学信号转导的实验研究具有广阔的应用前景。
应力加载装置;细胞信号转导;伺服电动机;压力传感器;LabVIEW
0 引言
骨骼是机体的应力承载系统,著名的Wolff定律表明:骨骼的生长会受到力学刺激影响而改变其自身的结构。Wolff所提出的骨适应理论也得到了广大学者的认可,而骨应力载荷的不足和骨应力感受能力的衰退均会引起骨量的丢失和骨力学强度的降低,这些也是骨质疏松发生和发展的主要原因之一[1-2]。因此,骨骼的生物力学和力学生物学的研究对于揭示骨适应的机制、研究骨的力学性质具有十分重要的意义。20世纪90年代,骨骼力学生物学和信号转导的研究深入至细胞水平,应力—生长关系以及骨骼细胞力学行为,如力学信号在体内的传导、蛋白质与DNA合成等成为研究的重点[3]。骨组织中包括3种最基本的细胞:成骨细胞、破骨细胞和骨细胞。其中,骨细胞被认为是骨组织中最重要的力学响应组件,它能够响应外界应力载荷的刺激,分泌sclerostin和RANKL等重要的细胞因子来调控成骨细胞和破骨细胞[4-6]。同时,诸多研究证实,成骨细胞和破骨细胞也能直接响应应力载荷的刺激[7-8]。学者们普遍认可的观点是:在外界应力载荷作用于长骨时,骨骼中骨细胞主要的应力作用形式是流体剪切力和骨矿化基质变形所产生的压应力,而成骨细胞和破骨细胞则主要是骨基质变形所产生的压应力刺激[9-11]。因此,本研究旨在设计一种简单、便携的体外细胞压应力加载装置,使其能够对骨骼细胞在其正常的生长环境下(37℃、5%CO2)施加生理水平的压缩载荷,并能够对所施加的压力幅值进行精确控制。该应力加载装置对于骨骼细胞的力学信号转导实验研究具有十分重要的意义。
1 方法
本应力加载系统如图1所示。该压应力加载系统由加压腔室、动作腔室、MCAC706-N全数字交流伺服驱动器和电动机、DMC1380运动控制卡、MPX5100AP压力传感器、NI USB-6008数据采集卡,以及基于PC的LabVIEW控制单元和采集单元构成。该应力加载系统的整体设计结构框图如图2所示。首先,采用聚甲基丙烯酸甲酯材料设计应力加载缸体部分(包括加压腔室、动作腔室和压力传送杆);其次,通过基于个人计算机(personal computer,PC)的LabVIEW控制单元控制DMC1380运动控制卡,从而驱动MCAC706-N全数字交流伺服驱动器,保证获得电动机的精确动作;最后,通过PC端的Lab VIEW采集程序控制NI USB-6008数据采集卡实时地采集MPX5100AP压力传感器信号,并将其传送至LabVIEW控制端,进行数据的实时显示和存储。
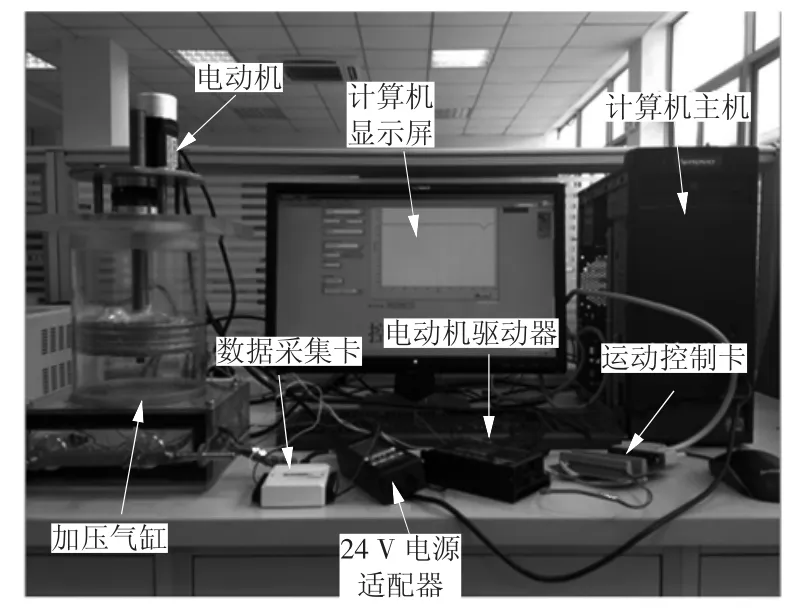
图1 系统实物照片

图2 装置结构框图
1.1 加压缸体的设计
加压缸体包括加压腔室、动作腔室和压力传送杆,缸体由聚甲基丙烯酸甲酯材料构成。该材料具有良好的热传导性能,能够使腔室内部与细胞培养箱内的温度保持一致。由SolidWorks软件绘制的缸体外观如图3所示,用于为细胞提供加压的腔室尺寸为220 mm×195 mm×80 mm,内部有效空间为180 mm× 170 mm×40 mm。加压腔室的一侧侧壁为可拆卸形式,可方便取放细胞培养器皿。动作腔室为直径150 mm、高200 mm,内部有效空间为直径140 mm、高200 mm的圆柱体结构。活塞在动作腔室内部往复运动实现对加压腔室内部气体的压缩。
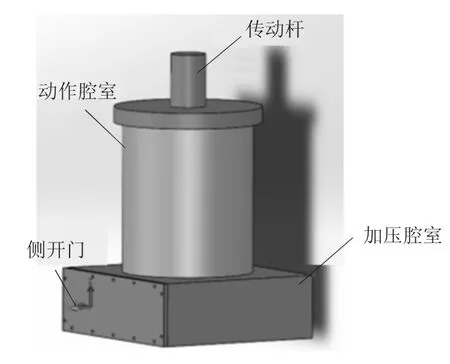
图3 加压缸体外观
1.2 电动机和运动控制模块
MCAC706-N交流伺服电动机的控制通过Lab-VIEW平台发出指令驱动DMC1380运动控制卡来实现。LabVIEW作为一种虚拟仪器语言,主要用于数据采集、控制、分析、存储和显示,支持数据采集卡和运动控制卡等仪器,具有实时性,符合实验装置要求。
1.2.1 运动控制卡
运动控制卡是连接计算机和电动机之间的桥梁,对电动机运动的位移、方向、速度等参数的精确控制均由运动控制卡实现。使用深圳雷赛智能控制股份有限公司的DMC1380运动控制卡,PC端为Windows XP操作系统工作环境,参照使用说明完成对硬件的配置及驱动程序的安装。通过在LabVIEW软件端调用运动控制卡驱动程序的DLL文件以实现计算机和运动控制卡的通信[12]。
1.2.2 电动机
根据实验要求,电动机要达到以下几个条件:(1)能够产生5~30 N的力;(2)最小步进距离为5 μm;(3)功率≥100 W的伺服式直线电动机;(4)速度和方向可调。本实验使用57JSFM1430P型号的伺服电动机以及MCAC706-N全数字交流伺服驱动器。该驱动器所能驱动的电动机功率范围为32~200 W,电动机功率为140 W。电动机运动的最大速度是3 000 r/min,电动机编码线为4 000脉冲/r,因此通过换算后得到实验中电动机的最大速度可达200 000脉冲/s,在频率为0.5Hz的应力作用下可以实现10~30kPa的载荷强度。
1.2.3 控制程序
编写的基于LabVIEW控制程序分为电动机运动的手动控制和自动控制2个部分,以方便不同的加压形式,根据所需的加压方式输入相关参数后电动机即可按要求运动,控制方便、直观。手动控制部分能实现任何形式的控制运动,虽然功能不受限制,但造成了人力资源的浪费;自动控制部分实现的功能是能够使电动机往复运动。它与手动控制部分的不同之处就是在叠层式顺序结构中增加了电动机反转和每个加载周期的间隔时间部分,同时增加了计时功能,超过总计时时间电动机会自动停止转动。电动机自动控制程序流程如图4所示。
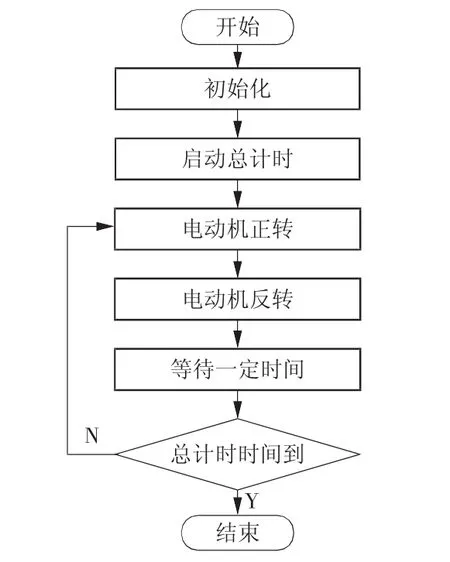
图4 电动机自动控制程序流程
程序中调用到的DLL库函数主要有:(1)DWORD d1000_board_init(void):为控制卡分配系统资源,并初始化控制卡;(2)DWORD d1000_get_command_pos(short axis):得到当前位置,并用于显示实时位置;(3)DWORD d1000_start_t_move(short axis,long Dist,long StrVel,long MaxVel,double Tacc):使电动机以梯形速度曲线控制指定轴至运行速度,并以相对坐标运行一段指定距离;(4)DWORD d1000_change_ speed(shortaxis,longNewVel):改变当前运动的速度;(5)DWORDd1000_board_close(void)函数:关闭控制卡,释放系统资源。
1.3 数据采集模块
数据采集模块由嵌入于应力加载装置加压腔室中的压力传感器产生模拟电压信号,随后将2路信号实时地传送至USB-6008数据采集卡,通过在LabVIEW上编写采集程序实现数据的实时采集、显示和存储。
1.3.1 压力传感器
本装置使用飞思卡尔半导体公司的MPX5100AP压力传感器,其工作电压为4.75~5.25 V,工作温度为-40~125℃。在忽略误差的情况下,压强值(P)与输出电压值(Vout)之间的关系为:Vout=Vs×(0.009P-0.095)。在一个标准大气压下,5 V的电源电压所对应的输出电压的理论值约为4 V。
1.3.2 数据采集卡
使用NI公司的USB-6008采集卡,该采集卡所采集的信号类型为电压信号;8路模拟输入(12位,10 kS/s),2路模拟输出(12位,150 S/s);12路数字I/O;32位计数器;最大电压范围为-10~10 V;最大采样率为10 kS/s;输入分辨率为12位差分,11位单端。实验中对压力传感器信号的采集选取差分接线方式。将通道0的正输入端连接传感器的信号输出端,负输入端接地。再将采集卡的+5 V供电端连接传感器的正电源输入端,采集卡的GROUND端接压力传感器的负电源输入端。
1.3.3 采集程序
在LabVIEW环境下控制的数据采集卡完成特定的功能都离不开数据采集卡驱动程序的支持,数据采集模块的作用是完成信号的采集。其预备工作有:数据采集卡的安装(USB热插拔)、采集卡驱动程序的安装以及数据采集卡的自测试,计算机能够识别后,再进行编程,程序主要分为以下几个步骤:(1)创建虚拟通道子VI并在其对话框里选择模拟输入电压;(2)采样时钟子VI,设置采样频率,输出电压最大、最小值(USB采集卡最大范围是±10 V),采样模式为有限点采集;(3)启动采集子程序子VI;(4)采集子程序VI,将数据从缓存中读入存储器;(5)除缓存,结束采集。
1.4 压力加载系统的标定
采用德国菲索AFRISO公司的手持式测压仪对本发明的加载系统进行校准。将手持式测压仪放入该加压系统的加压腔室中,通过加压系统的基于PC的LabVIEW软件控制程序对腔室进行加压,交流伺服电动机每向下旋进25圈,LabVIEW软件控制程序进行一次压力数据的采集,同时读取手持式测压仪所测量的压力值,对所采样的数据点进行直线线性拟合,比较加载装置进行加压的过程中加压系统压力传感器与标准测压计所测的压力值。
2 结果
本研究设计了一套新型的动态压应力加载系统,该加压系统简易便携,实用性良好;所施加压力的波形、幅值、频率均精确可控,确保该加压系统能精确工作。对于提高成骨细胞力学生物学实验稳定性具有重要意义。整个装置的设计达到了预期的要求,能够在LabVIEW平台通过手动和自动2种途径驱动电动机控制活塞往复运动产生压力,对内部环境稳定加压并显示实时位移变化值。而且运用LabVIEW编程软件编写程序,实现实时测量压力值的目的。采集结果如图5所示。对该压力加载系统进行校准标定,标定结果如图6所示。由图可见,本研究设计的应力加载系统与标准测压计所测的压力值具有良好的匹配性,证实了该加压装置的良好工作精确性。
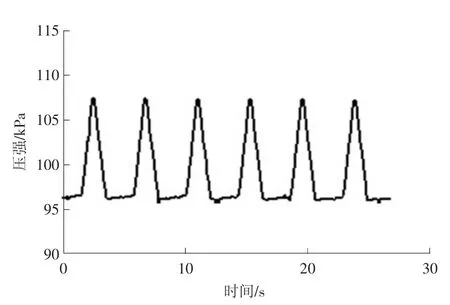
图5 加压条件下采集的信号
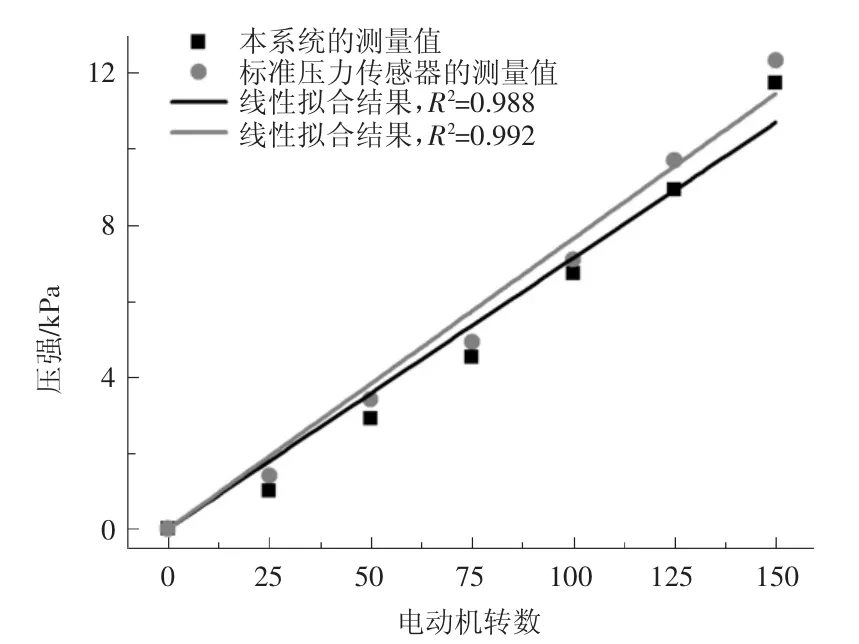
图6 压力加载系统的标定
3 讨论
本装置旨在实现压应力加载的周期化、可控化和可测化。国内外也有很多基于应力加载装置的设计研究[13-14]。对比来看,该装置不仅具有普通气压加载装置设备简单、细胞受力均匀等优点,而且还具有自身独特的优点:
(1)该小型化装置在实验中能够置于细胞培养箱中,从而可以保证在适宜的细胞生长环境中进行力学信号转导实验,提高实验的稳定性和可重复性。
(2)压力加载的速度、加压位移、加压时间可以通过程序前面板参数设置控制,采用往复运动达到自主的周期性加压。应力加载方式的不同对细胞的影响有所不同。一般认为,周期性压力对细胞增殖分化、功能及基因表达的作用明显大于持续性应力的作用。有文献指出,周期性动态压缩在软骨形成的早期阶段对细胞数量的增加和生存能力的提高有明显作用[15]。而该装置就实现了对细胞的动态周期性自主加压。
(3)使用压力传感器,能够准确地检测压力值的大小,压力的作用准确可靠;兼顾保存功能,能将采集的压力信号以TDMS格式进行记录保存,并以Excel形式直观显现出来。设置电动机自主运动且人离开的情况,便于之后调用实验数据或查看电动机是否曾出现异常。
(4)装置便携,使用36 V和24 V直流电源适配器以及采集卡本身5 V电源分别对电动机、运动控制卡以及压力传感器进行供电,不必考虑大型直流供电源的使用。
(5)软件界面具有图形化、动态显示、参数管理特点,使用方便,大大提高了控制和测量精度,并且便于二次开发。
4 结语
该空气动态载荷发生装置操作简单、工作精确,且具有小型、便携等优势,在骨骼细胞的力学生物学和力学信号转导的研究领域具有十分广阔的应用前景。
[1]Lang T,LeBlancA,Evans H,et al.Cortical and trabecular bone mineral loss from the spine and hip in long-duration spaceflight[J].J Bone Miner Res,2004,19:1 006-1 012.
[2]Lazo M G,Shirazi P,Sam M,et al.Osteoporosis and risk of fracture in men with spinal cord injury[J].Spinal Cord,2001,39:208-214.
[3]孙晓雷,马剑雄,马信龙,等.成骨细胞应力加载方式及生物力学特性的研究进展[J].中国骨与关节外科,2010(3):250-254.
[4]Jing D,Baik A,Lu X L,et al.Insitu intracellular calcium oscillations in osteocytes in intact mouse long bones under dynamic mechanical loading[J].FASEB J,2014,28:1 582-1 592.
[5]Nakashima T,Hayashi M,Fukunaga T,et al.Evidence for osteocyte regulation of bone homeostasis through RANKL expression[J].Nat Med,2011,17:1 231-1 234.
[6]Moriishi T,Fukuyama R,Ito M,et al.A negative regulatory system for bone mass augmented by the induction of RANKL in osteoblasts and Sost in osteocytes at unloading[J].PLoS One,2012,7:140-143.
[7]Jacobs C R,Yellowley C E,Davis B R,et al.Differential effect of steady versus oscillating flow on bone cells[J].J Biomech,1998,31:969-976.
[8]LI P,HU M,SUN S,et al.Fluid flow-induced calcium response in early or late differentiated osteoclasts[J].Ann Biomed Eng,2012,40:1 874-1 883.
[9]Price C,ZHOU X,LI W,et al.Real-time measurement of solute transport within the lacunar-canalicular system of mechanically loaded bone:direct evidence f or load-induced fluid flow[J].J Bone Miner Res,2011,26:277-785.
[10]Jacobs C R,Temiyasathit S,Castillo A B.Osteocyte mechanobiology and pericellularmechanics[J].Annu Rev Biomed Eng,2010,12:369-400.
[11]Bonewald L F,Johnson M L.Osteocytes,mechanosensing and Wntsignaling[J].Bone,2008,42:606-615.
[12]熊先锋,邢继峰,左洪波,等.普通运动控制卡在LabVIEW平台上的应用[J].微计算机信息,2006,22(31):139-141.
[13]Toribatake Y,Komine N.Usefulness of stress-loading test for ankle brachial index using an originally developed exercise device to detect peripheral arterial disease[J].Int Angiol,2009,28(2):100-105.
[14]李明黎,邹远文,黄学进,等.体外细胞压应力加载装置的研制与应用[J].中国组织工程研究与临床康复,2009,13(22):4 291-4 294.
[15]WANG Y,WANG J,BAI D,et al.Cell proliferation is promoted by compressive stress during early stage of chondrogenic differentiation of rat BMSCs[J].J Cell Physiol,2013,228(9):1 935-1 942.
(收稿:2014-04-21 修回:2014-08-09)
Design of dynamic compression load generator for bone cells
LIU Ge1,LUO Er-ping1,SHEN Guang-hao1,WANG Tian-bo2,ZHAI Ming-ming1,TONG Shi-chao1,JING Da1
(1.School of Biomedical Engineering,the Fourth Military Medical University,Xi'an 710032,China;2.School of Transportation and Logistics,Dalian University of Technology,Dalian 116024,Liaoning Province,China)
ObjectiveTo design a mechanical loading device with air pressure,which is employed for the investigation of in vitro skeletal cellular mechanotransduction.MethodsFirstly,the three-dimensional drawing for the structure of the device was performed using SolidWorks software,and the mechanical loading chamber was enclosed with the polymethyl methacrylate,which possessed excellent thermo-conduction property.Then,the PC-based LabVIEW control unit was programmed to drive the motor controller to make sure that the motion of the motor was controlled accurately.Finally,the pressure signals acquired by the sensor were sampled at real time by the PC-based LabView program through the DAQ card.ResultsThe mechanical loading device with air pressure was able to fit the size of the regular incubator for cell culture,and thus provided a favorable living environment for the in vitro cell growth,which might greatly increase the stability and repeatability for the in vitro experiment for cell mechanotransduction.Moreover,this device also exhibited excellent working stability.The motion of the actuator could be precisely controlled,and the signals of temperature and loads could be accurately acquired.ConclusionThe present mechanical loading system has unique advantages,such as the miniaturization and portability,etc,which may shed light for the study of mechanotranduction study and possess bright application potential for the future mechanotranduction investigation in bone cells.[Chinese Medical Equipment Journal,2015,36(1):1-4]
mechanical loading device;cellular mechanotransduction;servo-type actuator;pressure transducer;LabVIEW
R318.01;R318.6
A
1003-8868(2015)01-0001-04
10.7687/J.ISSN1003-8868.2015.01.001
陕西省自然科学基金(2014JQ4139);国家自然科学基金(31270889)
刘 戈(1992—),女,主要研究方向为应力加载装置的设计,E-mail:834711814@qq.com。
710032西安,第四军医大学生物医学工程学院(刘 戈,罗二平,申广浩,翟明明,佟世超,景 达);116024辽宁大连,大连理工大学交通运输学院(王天博)
景 达,E-mail:jingdaasq@126.com
