基于Mamdani型模糊推理的移动P3负压控制系统故障诊断算法设计
2015-12-20黄世安刘志国
黄世安,刘志国
基于Mamdani型模糊推理的移动P3负压控制系统故障诊断算法设计
黄世安,刘志国
目的:针对移动式生物安全三级实验室(简称“移动P3”)负压控制系统部分故障难以识别的问题,提出一种基于Mamdani型模糊推理的故障诊断方法。方法:选择容易拾取且能反映设备运行状态的压强和变频器输出频率作为推理系统的输入,并通过模拟实验确定不同设备状态下的压强和频率变化规律,参考调试文档数据和部分专家维修经验,制订模糊推理规则库。结果:实例验证表明,模糊推理结论与实际情况相符。结论:将模糊推理算法用于移动P3负压控制系统故障诊断简单易行,具有较强的实用性。
移动P3;负压控制;故障诊断;Mamdani模糊推理
0 引言
移动式生物安全三级实验室(以下简称“移动P3”)是用于现场开展致病性病原微生物的快速分离、培养、检测、鉴定等工作的机动实验场所。负压控制系统作为移动P3的核心,用于维系舱室内压力梯度和温湿度的稳定。系统中的某个部件发生故障后,会影响其他设备的工作状态,系统参数也随之变化,且部分故障征兆和故障原因之间存在着复杂的非线性映射关系。设置传感器虽然可以显示负压控制系统各部分的工作状态,却不能很好地反映故障发生的原因,因此难以确定故障发生的具体位置和原因。通过数学建模的方式难以达到比较理想的故障诊断结果,需要一种智能化的诊断方法来解决这一问题。模糊诊断方法接近人的表达习惯,知识表示的可读性强,能够模拟人的思维过程,模糊推理逻辑严谨,易于解释,具有很强的容错能力[1]。
1 移动P3负压控制系统
某型移动P3负压控制系统由送排风机、变频器、压力变送器、可编程逻辑控制器(programmable logic controller,PLC)、智能仪表、变风量阀、变制冷剂流量多联式(variable refrigerant volume,VRV)空调机组、电动密闭阀等组成。主实验舱负压控制系统原理如图1所示,采用送风定风量控制及排风变风量控制,主实验室送排风机前后端均有压力传感器检测压力变化。主要空间的设计压强为:主实验室(-70± 10)Pa、气锁间(-45±5)Pa、更防护服间(-20±5)Pa。
根据对系统影响的严重程度,可将故障分为硬故障和软故障2种[2]。因器件完全失效,导致一些特定的参数超限的故障称为硬故障,如直流电源无输出、风机停机、阀门完全堵塞、传感器失效等,此类故障一般是突发性的,故障现象较为明显,一旦发生则触发保护装置,导致系统进入安全模式,相对容易被检测到[3]。由于器件性能下降,功能退化引起的故障称为软故障,如阀门泄漏、传感器偏差和漂移、风机启动困难及转速降低等,此类软故障往往不会触发移动P3的故障报警和保护装置,也很难从数值上证明是否发生了故障,具有很强的迷惑性。功能间压力波动大是移动P3较为典型的一种软故障,此类故障采用人工智能诊断算法中的模糊推理方法判断,可以取得较好的诊断结果。

图1 主实验舱负压控制原理图
2 Mamdani型模糊推理基本原理
Mamdani型模糊推理是目前模糊故障诊断中应用较多的一种推理方法。其推理模型如图2所示,由模糊化单元、模糊推理机、模糊规则库和反模糊化单元4个部分组成[4]。
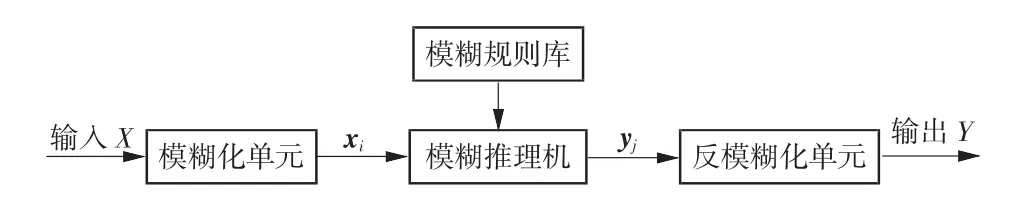
图2 Mamdani模糊推理模型图
模糊推理的工作过程是将故障征兆X经模糊化单元处理后变成模糊向量xi,xi调用模糊规则库中的相关推理规则[5-6],经模糊推理后得到模糊响应yj,再将模糊响应经反模糊化处理后得到系统的故障原因Y。
2.1 模糊量化
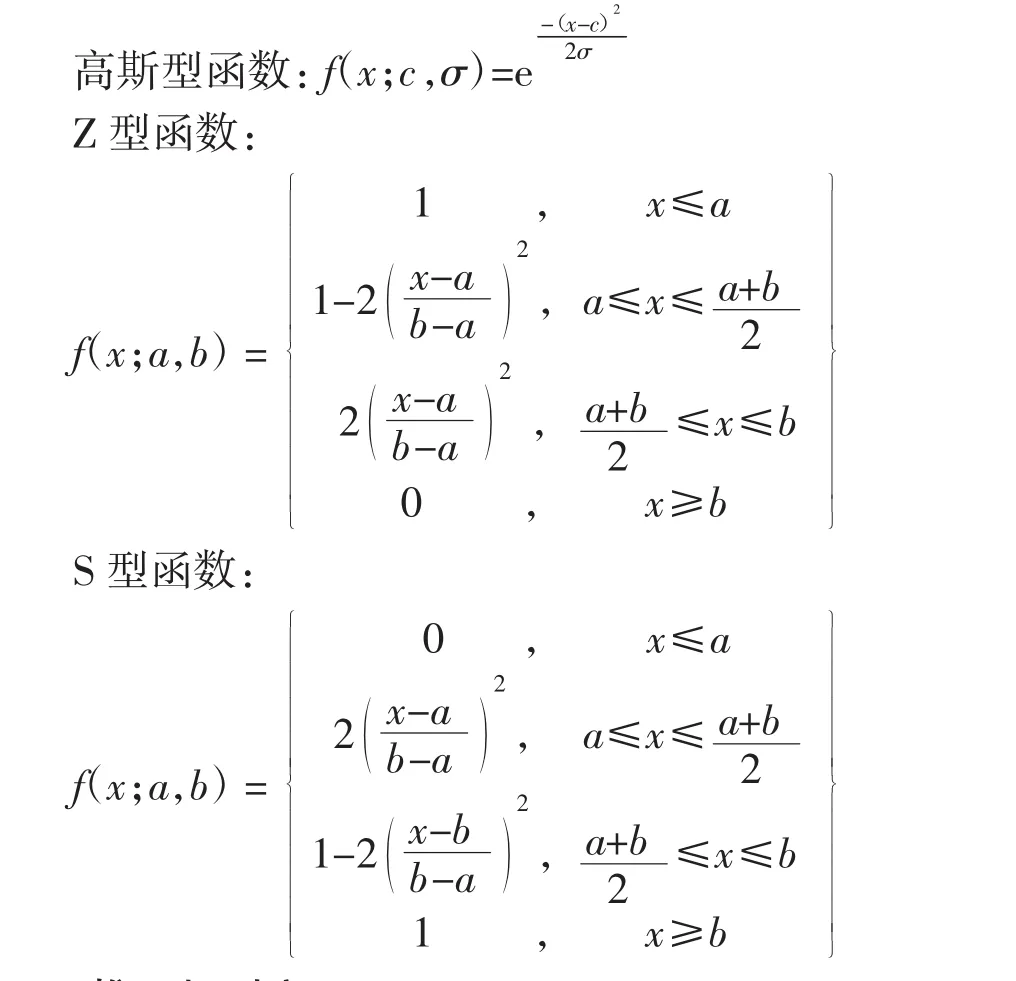
系统的输入根据其对应的隶属函数进行模糊化,常用的隶属函数有高斯型函数、Z型函数、S型函数、三角型或梯形函数。一般而言,高斯型函数接近实际,但计算量大,三角型或梯形函数计算量较小,具体采用何种函数应结合硬件性能和推理结果要求而定。各函数的具体定义如下:
2.2 推理规则库
模糊规则库是模糊推理系统的核心部分,由一组模糊推理规则组成。模糊规则可以一般化地表示成以下形式:

其中,X1,X2,…,Xn代表n个经模糊化处理的故障征兆,F1,F2,…,Fm为m个模糊化的独立故障原因,ωki(i=1,2,…,n)为权重系数,表示故障征兆Xi对本条规则R(k)的重要性;权重系数Ckj(j=1~n),反映了规则R(k)对故障原因Fj的重要程度[7-9]。
ωki和Ckj满足如下条件:

2.3 模糊推理机
根据模糊逻辑的运算方法,把“If…,Then…”型模糊推理规则转换成从论域上的模糊集到论域上的模糊集的映射关系。计算公式为

其中,A、A′为输入量的模糊集合,B、B′为输出量的模糊集合。
2.4 反模糊化
将经模糊推理得到的故障原因隶属度按照一定的方法和原则进行处理,称为反模糊化(解模糊化),方法有重心法、加权重心法、面积和中心法、最大隶属度法等。其中重心法最为常用,定义如下:

最后取模糊集合中最接近的值输出。
3 基于Mamdani型模糊推理的电气系统故障诊断
对于部分软故障诊断而言,难点在于如何在众多的征兆信号中选取合适的部分作为故障诊断模糊推理系统的输入输出变量[10]。所选取的征兆信号,数值大小能反映设备是否发生故障,且容易拾取,方便后处理。如表示三相离心风机运行的特征信号有输入频率、风机温度、转速、振动频率、风量等,如果风机未自带转速测量装置,后期加装测速装置成本较高,费时费力,且风机运行中会聚集灰尘,导致测量值不可靠。根据实际可采集的数据以及模糊逻辑推理规则要求,确定以下参数作为模糊推理的输入变量和输出变量,见表1。

表1 输入输出变量表
如表1所示,一共15个参数,组成一个7输入、8输出的模糊逻辑推理故障诊断系统。
3.1 输入模糊化、输出反模糊化
根据实际情况,输入模糊化和输出反模糊化均采取连续型函数表述。
输入模糊化集合:L:“过低”,N:“正常”,H:“过高”;
输出反模糊化集合:IP:“不太可能”,P:“很有可能”。
具体定义如下:
(1)输入变量。
X1为主实验间压强,单位为Pa。L:(-∞,-80),N:[-80,-60],H:(-60,∞)。
X2为气锁间压强,单位为Pa。L:(-∞,-50),N:[-50,-40],H:(-40,∞)。
X3为送风机前后压强,单位为Pa。L:[715,814],N:[815,1 000],H:[1 001,1 500]。
X4为排风机前后压强,单位为Pa。L:[825,924],N:[925,1 100],H:[1 101,1 500]。
X5为更防护服间压强,单位为Pa。L:(-∞,-25),N:[-25,-15],H:(-15,∞)。
X6为送风变频器输出频率,单位为Hz。L:[0,29],N:[30,40],H:[41,50]。
X7为排风变频器输出频率,单位为Hz。L:[0,29],N:[30,40],H:[41,50]。
以上参数是根据系统设备参数以及移动P3调试文档而确定的。
(2)输出变量。F1:送风机故障:IP:“不太可能”,P:“很有可能”;F2:送风变频器故障:IP:“不太可能”,P:“很有可能”;
F3:新风密闭阀故障:IP:“不太可能”,P:“很有可能”;
F4:排风机故障:IP:“不太可能”,P:“很有可能”;
F5:排风变频器故障:IP:“不太可能”,P:“很有可能”;F6:变风量阀故障:IP:“不太可能”,P:“很有可能”;F7:排风密闭阀故障:IP:“不太可能”,P:“很有可能”;
F8:泄漏故障:IP:“不太可能”,P:“很有可能”。
3.2 隶属函数确定
依据隶属函数的确定法则,同时兼顾实际情况和系统运算难易程度,确定输入输出变量的隶属函数如图3所示。当输入变量∈L时,均取Z型函数;当输入变量∈N时,取高斯型函数;输入变量∈H时,取S型函数。X1∈L时的参数a=-100,b=-70;X1∈N时的参数σ=6,c=-70;X1∈H时的参数a=-70,b=-40。X2∈L时的参数a=-69,b=-44;X2∈N时的参数σ=3,c=-45;X2∈H时的参数a=-47,b=-20。X3∈L时的参数a=706,b=1 100;X3∈N时的参数σ=100,c=1 197;X3∈H时的参数a=1 237,b= 1 550。X4∈L时的参数a=808,b=1 200;X4∈N时的参数σ=124,c=1 200;X4∈H时的参数a=1 240,b=1 547。X5∈L时的参数a=-42,b=-18;X5∈N时的参数σ=3.4,c=-20;X5∈H时的参数a=-22.4,b= -1.8。X6∈L时的参数a=11,b=36;X6∈N时的参数σ=5.5,c=33.8;X6∈H时的参数a=29.5,b=54.7。X7∈L时的参数a=17.5,b=37.1;X7∈N时的参数σ=3.2,c=34.6;X7∈H时的参数a=33.7,b=53.1。输出变量均采用2个S型之和的函数表示,当输出变量∈IP时的参数a1=5.493,c1=-0.5,a2=5.493,c2=0.5;当输出变量∈P时的参数a1=5.493,c1=0.5,a2=5.493,c2=1.5。

图3 输入输出对应隶属函数图
3.3 模糊推理规则梳理
推理规则体现了对电气系统故障诊断的基本方法,根据对移动P3设计文档的分析,参考固定式实验室的故障处理方法,通过模拟实验确定设备不同状态下各参数的变化规律,同时请教有经验的维修人员,总结出13条推理规则,整理结果见表2。
反模糊化采用重心法,对结果四舍五入,保留小数点后2位得到最终的判断输出。
4 结果分析
根据输出量隶属函数的定义可知,当诊断系统的输出值小于0.5时,表明该故障输出属于“不太可能”的范畴;当诊断系统的输出值大于0.5时,说明该故障“很有可能”发生。
从系统调试文档中选取2份样本数据对诊断系统进行验证,见表3。

表2 模糊推理规则库表
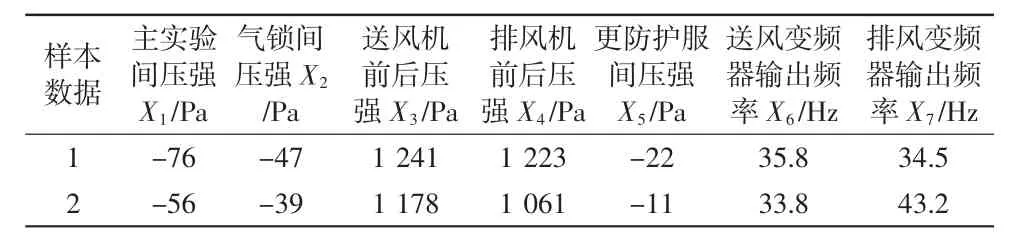
表3 样本数据表
样本数据1中,各输入量代表的含义为:主实验间压力-76 Pa,属于“偏低”的概率是0.08,属于正常的概率是0.61,属于“偏高”的概率约为0,因此可认为主实验间压力在-76 Pa上属于正常。同理,可知气锁间压力正常,更防护服间压力正常,送风机前后压力正常,排风机压力前后正常,送风变频器输出频率正常,排风变频器输出频率正常。经模糊推理系统得出各故障原因输出的概率分别为0.06、0、0、0、0、0、0、0,因此判断负压控制系统不存在故障,这与实际情况吻合。
同理,样本数据2中,可知主实验间、气锁间、更防护服间压强均偏低,送排风机前后端压强正常,送风变频器输出频率也在正常范围内,只有排风变频器输出频率偏高(属于H的概率为0.51,属于N的概率为0.02)。送风机前后压力与送风变频器输出频率正常,说明送风子系统工作正常,各功能间压力偏低,排风机前后压力低,说明排风量减少,但排风变频器输出频率提高,说明排风机排风能力下降很快,可认为是排风机出现排风不畅故障,模糊推理系统得出各故障输出量的概率分别为0、0、0、0.54、0、0、0、0,即排风机故障,符合实际情况。
以上2个样本数据表明,运用模糊推理可实现对负压控制系统软故障的诊断,但诊断结果优劣与否很大程度上与参数选择有关。如果存在足够多的故障样本,对故障模糊推理系统进行进一步的参数优化,其推理结果会更加可信。
5 结语
运用模糊推理原理进行故障诊断,省去了建立精确数学模型的这一烦琐步骤。只要隶属函数选择恰当,推理规则准确无误,可以比较准确地判断是否出现故障,并定位故障发生的部位。对于那些难以用精确数学模型描述的,或故障征兆和故障原因之间存在复杂的非线性映射关系的系统而言,利用模糊推理方法进行故障诊断,是一种较为简单易行的方法。
[1]宗春英.基于人工智能的故障监测和诊断系统的研究[J].制造业自动化,2012,34(7):52-54,72.
[2]杨士元,胡梅,王红.模拟电路软故障诊断的研究[J].微电子学与计算机,2008,25(1):1-8.
[3]马小平,肖兴明.基于专家系统的提升机故障诊断系统[J].中国矿业大学学报,1999,28(5):88-90.
[4]李国栋,丁宁,徐永海.基于Mamdani型模糊推理的电压暂降源识别[J].华北电力大学学报:自然科学版,2010,37(2):43-48.
[5]蔡桂芳,李君.基于模糊神经网络的液压动力机构故障诊断研究[J].机电产品开发与创新,2007,20(3):17-18.
[6]张小玉,黄维新.基于模糊神经网络的直流电网故障诊断研究[J].机电产品开发与创新,2009,22(3):75-76.
[7]刘颖,王向军,张民.基于模糊理论的容差电路故障诊断方法[J].微计算机信息,2007,23(34):160-161,206.
[8]徐向进,于建成.自适应模糊神经控制的汽车电动助力转向系统[J].电子科技,2005(6):8-11.
[9]何传严.粗糙集在卫星电源故障诊断中的应用[D].哈尔滨:哈尔滨工业大学,2006.
[10]邵一琨.基于模糊逻辑的地铁列车牵引供电系统关键结构故障诊断[D].北京:北京交通大学,2011.
(收稿:2015-02-04 修回:2015-05-14)
关于医学论文标题的撰写要求
1.题名应准确、简明,反映文章的核心内容。一般使用能充分反映论文主题内容的短语,而不使用具有主、谓、宾结构的完整语句,最好不用标点符号。中文题名一般不宜超过20个汉字。
2.论文标题一般不设副题名。确有必要时,用冒号将副题名与主题名分开;或者用与主题名字体、字号不同的文字排印副题名,以示区别。采用后一种编排格式时,在目次表中主题名与副题名用“:”隔开。
3.题名用词应有助于选定关键词和编制题录、索引等,尽量避免使用非公知公认的缩略语、字符、代号等,也不应将原形词和缩略语同时列出。题名中的外文人名要用原文。
(本刊编辑部)
Design of fault diagnosis algorithm for mobile BSL-3 negative pressure control system based on Mamdani fuzzy inference
HUANG Shi-an,LIU Zhi-guo
(Institute of Medical Equipment,Academy of Military Medical Sciences,Tianjin 300161,China)
Objective To put forward a fault diagnosis algorithm based on Mamdani fuzzy inference for mobile BSL-3 negative pressure control system.Methods Pressure and inverter output frequency were selected as the input variables of the inference system because they were easy to pick up and could reflect the running states of the devices.The change laws of pressure and inverter output frequency at different device states were determined by simulation experiment.Fuzzy inference rule database was constructed with references to debug document and some experts' experience.Results Trials proved that the conclusion by fuzzy inference accorded with the reality.Conclusion Fuzzy inference algorithm is easy and practical for the fault diagnosis of mobile BSL-3 negative pressure control system.[Chinese Medical Equipment Journal,2015,36(11):5-9]
mobile BSL-3;negative pressure control;fault diagnosis;Mamdani fuzzy inference
R318;R122.2
A
1003-8868(2015)11-0005-05
10.7687/J.ISSN1003-8868.2015.11.005
军队重大专项课题(AWS11Z005-2)
黄世安(1983—),男,主要从事医疗设备维护管理方面的研究工作,E-mail:huangshian_hp@163.com。
300161天津,军事医学科学院卫生装备研究所(黄世安,刘志国)
刘志国,E-mail:liuzhiguo_s@263.net
