脑卒中患者四肢康复训练器的设计
2015-12-20张晓玲阮俊勇
张晓玲,阮俊勇
脑卒中患者四肢康复训练器的设计
张晓玲,阮俊勇
目的:设计一种适合在康复中心和家庭中进行四肢康复训练的器械。方法:四肢康复训练器主要由底座立柱、电动机控制、传动负荷、患者座椅、上肢传动和下肢传动6个部分组成。使用时可分别通过自主用力转动手摇把手(蹬踏脚蹬)或通过电动机驱动手摇把手(脚蹬)转动,使患者的上(下)肢随手摇把手(脚蹬)做持续的旋转运动,从而实现主被动模式下的上(下)肢康复训练。结果:该训练器可使脑卒中患者在进行四肢肌肉训练的同时,不断增强肢体运动的协调性,加快肢体康复的进程。结论:该训练器结构简单、移动方便、成本较低,可在多种场合进行脑卒中后的康复训练。
脑卒中;四肢康复训练器;主动训练;被动训练
0 引言
脑卒中是脑中风的学名,它是一种突然发病的脑部血液循环障碍性疾病,又叫脑血管意外。脑卒中在我国中老年人群中发病率较高,具有高死亡率、高致残率、高经济负担的特点。近年来,由于生活方式和工作压力的影响,其发病年龄有向年轻化方向发展的趋势[1]。目前,在我国由于受住院时间、住院费用、医疗条件及康复知识普及等方面的限制,脑卒中急性期治疗后坚持留在医院或到社区康复中心进行康复治疗的患者人数有限,有的甚至放弃早期的康复训练和治疗。由于康复治疗是一个长期反复和循序渐进的过程,如果脑卒中患者出院后得不到及时的、系统的、科学的康复治疗,将会留下终生的肢体功能障碍和其他后遗症,给患者带来很大的痛苦,也给患者家庭增加沉重的负担[2]。运动疗法是脑卒中偏瘫患者进行肢体康复训练的一个重要手段,目的在于促进患者肢体的血液循环,增加肢体关节的活动范围,改善运动的平衡协调,使患者能够回归社会,融入家庭生活[3]。四肢康复训练器的设计解决了目前市场上流行的肢体康复训练器械存在的结构较为复杂、成本高、移动不便、使用场所受限等技术问题,是一款适合在社区和家庭中对脑卒中患者进行肢体训练的康复器械。
1 结构设计
脑卒中患者四肢康复训练器主要由底座立柱、电动机控制、传动负荷、患者座椅、上肢传动、下肢传动6个部分组成[4](如图1所示)。
1.1 底座立柱
底座立柱主要包括底板、安装架、定位孔、定位销、万向轮和立柱,用于整个训练器的支撑、固定和移动。
1.2 电动机控制
电动机控制主要包括伺服电动机、传动轴、传动链轮、调节转轴、调节链轮、横杆、花篮螺栓等。伺服电动机通过驱动传动轴、传动链轮、调节转轴和调节链轮构成机械传动组合,分别带动脚动链轮和手动链轮转动,控制脚蹬和手摇把手随之转动,从而使患者的四肢得到锻炼。这个机械传动组合采用的是链条传动方式,具有结构紧密、工作可靠、效率高、寿命长、成本低的特点。为实现传动链轮和手动链轮之间的稳定传动,在2个立柱之间安装调节滑块。通过花篮螺栓可调整调节链轮的位置,使链条平稳传动。
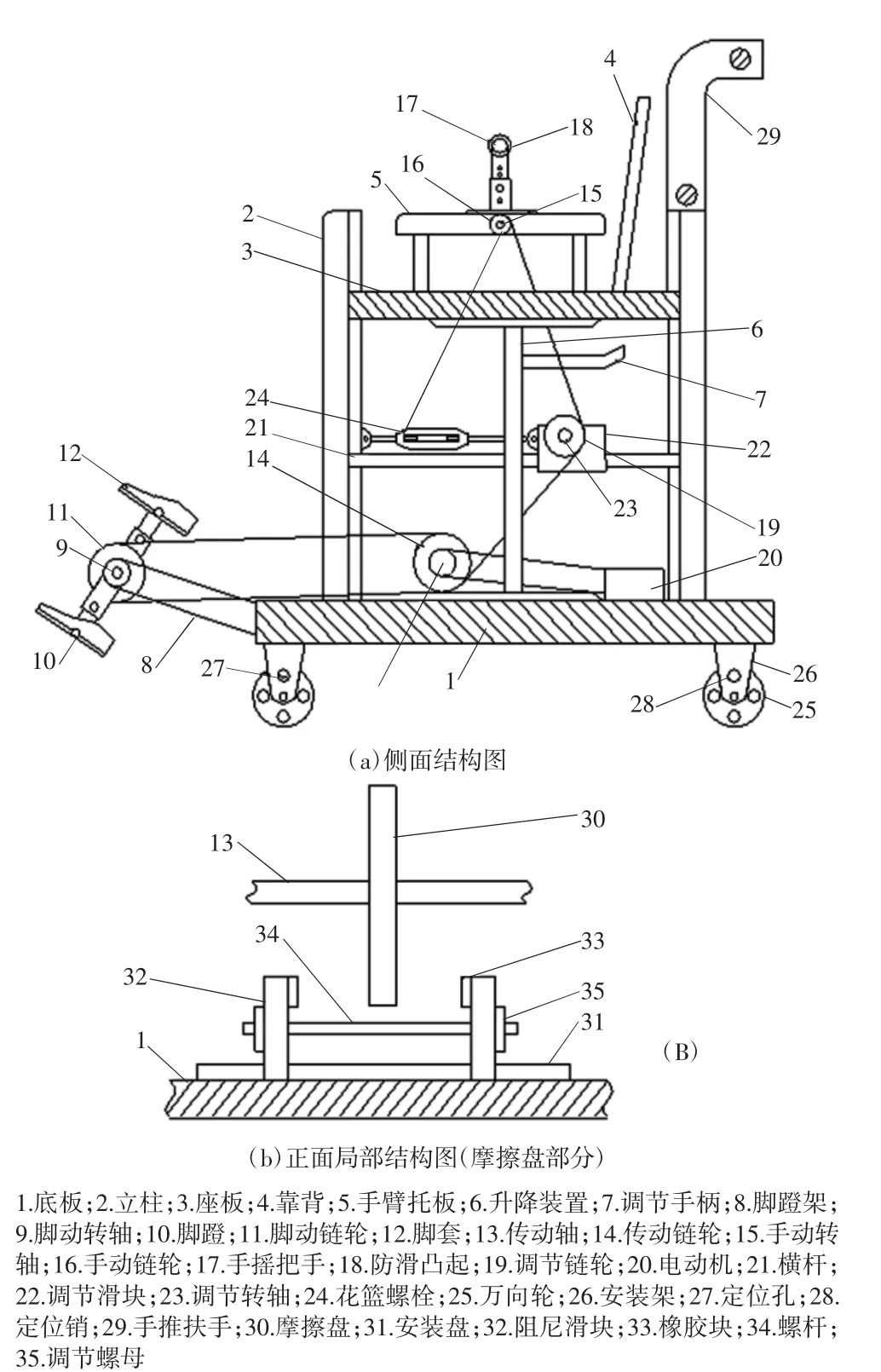
图1 脑卒中患者四肢康复训练器结构示意图
1.3 传动负荷
传动负荷主要包括摩擦盘、阻尼滑块、橡胶块、螺杆和调节螺母等。其原理是通过调节阻尼滑块外侧的螺母,来改变2个阻尼滑块的间距,控制橡胶块与摩擦盘的接触程度,来改变传动轴和传动链轮负荷的大小,增加或降低患者肢体训练的强度,以满足不同康复阶段患者的训练需求。
1.4 患者座椅
患者座椅主要包括座板、靠背、升降装置、调节手柄、手臂托板、手推扶手等。利用调节手柄控制升降装置上下移动,改变患者训练用座椅的高低,以适合不同身高的康复患者进行肢体康复训练。陪护人员可通过手推扶手,移动康复患者在不同场合进行训练。
1.5 上肢传动
上肢传动主要包括手动转轴、手动链轮和手摇把手。患者可分别通过自主用力转动手摇把手或通过电动机驱动手摇把手转动,使患者的上肢随手摇把手做持续的旋转运动,从而实现主被动模式下的上肢康复训练。
1.6 下肢传动
下肢传动主要包括脚动转轴、脚动链轮、脚蹬架和脚蹬。患者可分别通过用力蹬踏脚蹬或通过电动机驱动脚蹬转动,使患者的下肢随脚蹬做持续的旋转运动,从而实现主被动模式下的下肢康复训练[5]。
2 结构特点
脑卒中患者四肢康复训练器具有以下结构特点:
(1)训练时,为保证患者的安全,必须将定位销插入安装架和万向轮轮毂的插孔中锁定万向轮,以固定康复训练器。移动时,陪护人员需先将定位销从轮毂中拔出,再通过手推扶手移动整个训练器。四肢康复训练器适合在室内外等多种场所使用。
(2)通过调节手柄控制升降装置,可调节患者座板的高低,以适应不同身高的康复患者更加舒适地进行康复训练。
(3)康复训练器手摇把手和脚蹬鞋套上设计有按摩凸起、磁片等,可对患者手掌和脚底的相应穴位进行按摩、磁疗,具有刺激神经、增强训练效果、加快肢体功能康复的作用。另外,手摇把手上的凸起还具有防滑作用。脚蹬鞋套的设计是在鞋套内壁的前段加装了一个可调节内部空间大小的气囊,以适合不同脚码的患者使用。
(4)四肢康复训练器设计的摩擦盘可根据患者肢体的肌力和功能情况,调节其康复训练强度的大小。
(5)主动训练时,患者通过上下肢用力转动手摇把手或蹬踏脚蹬,控制手动链轮或脚动链轮分别带动患者的四肢做持续的旋转运动训练,手动链轮和脚动链轮旋转速度的快慢与患者施加到手摇把手和脚蹬上力量的大小有关;被动训练时,伺服电动机驱动传动链轮分别带动脚动链轮和手动链轮同时旋转,然后再带动脚蹬和手摇把手转动,使患者的四肢跟随电动机的转速做匀速旋转运动训练,脚蹬和手摇把手旋转速度的快慢由伺服电动机进行控制[5]。
3 使用方法
(1)康复患者在上器械训练前,陪护人员必须先将底板上的万向轮锁住,防止四肢康复训练器来回移动,危害康复患者的安全。
(2)由陪护人员帮助康复患者坐到四肢康复训练器的座板上,系好安全带,然后根据患者的身高,用调节手柄调节座板的高低,使每一名康复患者都能有一个舒适、自然的坐姿。
(3)由陪护人员帮助康复患者把手、脚分别放入脚蹬鞋套和手摇把手上,并进行固定,防止患者因手、脚无力从手摇把手或脚蹬上脱落。
(4)根据每个患者肢体的肌力和功能情况,选择不同的康复训练模式。在康复训练初期,由于患者肢体的肌肉力量微弱甚至无力,此时应选择被动训练模式。陪护人员帮助打开训练器的电源开关,伺服电动机开始工作,电动机通过机械传动组合驱动脚蹬和手摇把手带动患者的四肢进行旋转运动训练。训练时间和电动机转速由康复医生决定。
(5)患者经过前期的被动训练,四肢的肌肉力量和平衡协调能力得到一定的恢复,此时可视情选择主动训练模式,以增大康复训练的强度,加快患者肢体康复速度。在主动训练模式下,伺服电动机不工作,由康复患者通过上下肢的自主用力控制脚蹬和手摇把手转动,使康复患者的四肢得到锻炼[6]。
4 应用效果
通过对脑卒中患者急性期后是否积极进行康复训练的调研发现,坚持进行系统康复训练90%的患者恢复了行走和生活自理,30%的患者还可从事工作强度较轻的工作;如果不进行康复训练,上述的百分率只有6%和5%[7]。肢体运动训练是脑卒中患者康复训练的重要手段,我们应用四肢康复训练器对脑卒中患者进行康复训练,临床效果明显:(1)患者通过康复训练,增强了肢体的肌肉力量,加快了肢体的血液循环,可有效预防肢体静脉血栓和褥疮的发生;(2)在进行肢体训练的同时,对腹部肌肉的锻炼具有间接作用,可帮助增加肠蠕动,促进患者大小便的畅通;(3)改善患者肢体平衡的协调性,使患者能够尽快地重新行走和生活自理;(4)通过肢体运动训练对卧床患者的心理具有积极的影响,增强了其对生活的自信心;(5)通过肢体训练,提高了患者的心肺功能,不同程度增加了患者的氧气吸入量、呼吸频率和呼吸潮气量,使患者总的身体状况得到改善,加快了其肢体康复的进程[8]。
5 结语
随着我国的经济发展和社会进步,人们的自我保健意识也在不断增强,尤其是对脑卒中患者急性期后的康复治疗,更是引起了政府和社会的高度关注,越来越多不同种类和不同功能的医疗康复设备逐渐走进医院、社区和家庭。因此,用于社区和家庭的康复设备应该更多地考虑经济、实用、有效和操作方便[9]。四肢康复训练器就是一款适合在社区和家庭对脑卒中患者进行肢体训练的康复器械。
[1]李晓华.早期康复训练对脑卒中患者肢体功能恢复的影响[J].中国实用护理杂志,2011,27(18):11-12.
[2]付云,李慧.俱乐部模式在脑卒中肢体康复训练中的应用[J].护理研究,2009,23(8):2 017-2 019.
[3]朱镛连,张皓,何静杰.神经康复学[M].北京:人民军医出版社,2005.
[4]张晓玲.一种脑中风康复训练器:中国,201420148813.0[P].2014-08-20.
[5]刘相权,李启光,高宏,等.肢体康复训练器控制系统的研究[J].中国康复理论与实践,2013,19(5):407-411.
[6]龙耀斌.上肢康复机器人训练对脑卒中偏瘫患者上肢功能的影响[J].广西医科大学学报,2012(2):260-261.
[7]刘薇.福州市社区康复资源及脑卒中患者康复现状研究[D].福州:福州中医药大学,2014.
[8]郑东鹏.脑卒中偏瘫患者社区康复模式探讨[J].医学信息,2010(7):1 921-1 922.
[9]韩贞贞.家用老年人肢体康复训练产品设计研究[D].上海:东华大学,2014.
(收稿:2015-04-08 修回:2015-07-19)
Design of limb training device for stroke patients
ZHANG Xiao-ling,RUAN Jun-yong
(Department of Equipment,the First Sanatorium in Qingdao of Jinan Military Area Command,Qingdao 266071,Shandong Province,China)
Objective To design a limb training device for the rehabilitation center and home.Methods The device was composed of six parts,including a base collar,a motor control unit,drive loads,patient seats,an upper limbs drive unit and a lower limbs drive unit.The patient rotated two handles or pedals manually or electrically,and then the upper limbs or lower ones moved synchronously with the handles or pedals respectively to realize active or passive rehabilitation training.Results The device could be used for limb muscles training,with motion coordination enhanced simultaneously. Conclusion The device has simple structure,high mobility while low cost,and is compatible with multi training conditions for stroke rehabilitation.[Chinese Medical Equipment Journal,2015,36(12):40-42]
stroke;limb training device;active training;passive training
R318.6;TH772.1
A
1003-8868(2015)12-0040-03
10.7687/J.ISSN1003-8868.2015.12.040
全军“十二五”后勤科研重点课题(BWS11J003)
专 利:国家实用新型专利(ZL 201420148813.0)
张晓玲(1960—),女,主任,主任技师,主要从事医疗设备和医学计量管理方面的研究工作,E-mail:zhangxlyl@163.com。
266071山东青岛,济南军区青岛第一疗养院器材科(张晓玲,阮俊勇)
