三维虚拟海洋图像仿真在舰艇视觉中的应用
2015-12-20王继州
董 峰,王继州
(1.黄河科技学院 现代教育技术中心,河南 郑州450006;2.中原工学院信息商务学院 计算机科学系,河南 郑州450007)
0 引 言
随着计算机处理技术的发展和Vega Prime、Creator 以及VC 等高级编程语言的系统化和功能化实现,虚拟视景仿真技术得到长足发展,并广泛应用到军事领域、舰艇防御领域和科研活动等领域。采用视景仿真技术建立海战多武器平台下的舰艇攻击和防御的视景场景,模拟海战战况,在模拟演习的先导技术、效验技术和分析技术方面发挥重要作用[1]。
虚拟视景仿真技术日趋成为模拟训练,推演对抗,演习比赛以及装备测试的新宠和必须,虚拟视景仿真技术具有训练成本小,安全可靠性强,费用低廉,可操作性强等特点并在航空航天、虚拟军用地图、海战模拟、效能评估等领域有广泛应用价值[2-4]。在计算机视觉环境下建立舰艇防御和攻击的虚拟场景的重点是对三维虚拟海洋图像的仿真实验,传统的三维虚拟海洋视景仿真中在操作进程和虚拟数据资源配置中采用单线程设计,无法实现并行处理,三维视景仿真效果不理想,且对天气等环境因素不能生成[5]。在对三维海洋视景仿真中,由于舰艇三维环境的多样化以及三维视景仿真中在操作进程和虚拟资源配置的处理上,仍然面临着很多瓶颈问题需要解决。对此,本文提出一种基于海洋拓扑结构网孔分解的三维虚拟海洋仿真技术并应用在舰艇的被动防御视觉系统中。
1 三维海洋环境下舰艇的视觉控制模型
构建三维海洋环境下舰艇的视觉控制模型[6-9]之前,做如下几点基本假设:
1)水面舰艇为刚体,其外形关于纵平面x1Oy1平面对称;
2)水面舰艇在虚拟海洋场景中流体动力位置力及阻尼力满足线性假设;
3)忽略因加工及安装造成的误差;
4)近似认为地面坐标系为惯性坐标系;
5)忽略因舰艇尾流引起的质量和质心位置的变化。
基于上述假设,进行水面舰艇视觉控制模型构建,在以下几个坐标系中分别建立水面舰艇的视觉控制模型,分别为三维海洋流动速度坐标系Ox3y3z3、水面舰艇的体坐标系Ox1y1z1、水面舰艇受到攻击后的弹道坐标系Ox2y2z2、以及地面坐标系。得到水面舰艇的视觉控制模型用控制方程描述为:

式中:θ 为水面舰艇视觉坐标中的速度矢量倾角;ϑ为水面舰艇受到攻击后的俯仰角;α 为攻角。在横滚等运动的影响下,产生尾流拖曳,舰艇对称面Ox1y1上的投影与Ox1轴之间的夹角,设舰艇拖曳体发射的正弦波信号为:

通过上述描述,得到水面舰艇的速度坐标系Ox3y3z3,水面舰艇的质心为坐标系原点O;选取速度矢量V 为Ox3轴;Oy3轴与Ox3轴垂直,且位于水面舰艇纵向对称面内,向上为正;Oz3轴垂直于Ox3y3平面,其方向按右手定则确定。
水面舰艇的体坐标系Ox1y1z1中,体坐标系与水面舰艇固连。水面舰艇的质心为坐标原点O,Ox1指向头部,与水面舰艇的纵轴重合;Oy1向上为正,在纵对称平面内;Oz1按右手定则确定。
水面舰艇受到攻击后的弹道坐标系中Ox2y2z2:水面舰艇的质心为坐标系原点;选取水面舰艇质心的速度矢量V 为Ox2轴;Oy2轴在一个铅垂平面内,且这个平面包含速度矢量,向上为正;Oz2轴按照右手定则确定。
地面坐标系Axyz 中:地面坐标系Axyz 是一种与地球进行固连的坐标系。水面舰艇质心在地面上的投影作为坐标系的原点,Ay 轴与地面垂直,向上为正;Ax 以发射方向为正;Az 轴按右手定则确定。通过上述设计,构建了视觉控制模型,为进行三维虚拟海洋图像下的舰艇视觉控制仿真奠定控制模型基础。
2 基于Vega Prime 建立三维虚拟海洋
2.1 三维虚拟海洋的数据模拟和图像处理
在前期基于Creator 进行模型构建的基础上,结合国家海洋信息中心,将下载到的* . asc 文件遥感数据通过Creator 的Raster to DED 工具转化为所需的DED 数据。最后基于Vega Prime 软件,建立三维虚拟海洋视景仿真系统,软件平台选择上,本文采用Vega Prime 软件中Marine 海洋模块提供虚拟海洋环境视景生成原始模型,采集真实的海底地形和天气气候等状态参数数据,进行特效处理,在此之前,需要进行海洋视景仿真的拓扑结构构建,本文进行高分辨率拓扑生成。提出多分辨率海洋拓扑结构构建[10],海洋拓扑结构如图1 所示。分别描述为m×n 网络结构,其中,网格结构中的网格单元表示虚拟海洋的模块子单元。网络单元和模块子单元表示为Cell (col,row)),其中col 表示行,row 表文列,每个子单元表示一个虚拟海洋环境物理子区域。本文采用LOD (Level of Detail)技术,对网孔进行高分辨变换成像,对海洋拓扑结构分解的网格单元,物理子区域、网孔以及网孔节点和网孔面示意图如图1 所示。

图1 海洋拓扑结构Fig.1 Marine topology
通过海洋拓扑结构网孔分解,利用分辨率最高LOD,形成多路径高分辨率实体环境对象模型,对对象模型进行多坐标系集合生成,模型层级递进,构成LOD 高分辨率模型库。
2.2 三维虚拟海洋的视觉特征提取
采用多线程技术建立三维虚拟海洋模型,主要是针对于传统的三维视景仿真中在操作进程和虚拟资源配置中采用单线程设计,无法实现并行处理,三维视景仿真效果不理想的问题。对水面采用多路径高分辨率的大气粒子散射模型,得到三维虚拟海洋的大气散射状态方程描述为:

其中,A 为等高线作用成分;t(x)为海洋环境的雾化透射率;J(x)t(x)为图像位置x 处的传播函数。水面图像信息,将三维虚拟海洋图像S 分解为正交投影序列,灰度分量为:
其中,点集C ∈S,图像I 的任一通道中起伏误差向量Jdark(x)逼近于0,大气耗散函数局部子块区域内满足:


代入上式得:
视觉特征信息采集公式为:

式中Rt为透射率估计值。通过上述图像处理,实现三维虚拟海洋的视觉特征提取,应用在舰艇视觉防御系统构建模型中。
3 三维虚拟海洋中舰艇视觉仿真
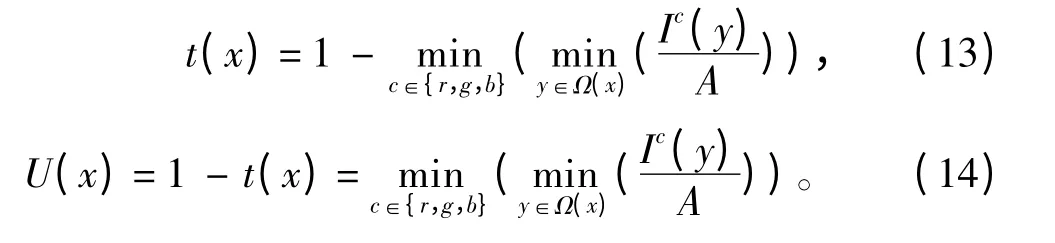
当舰船在水面运动时,在多线程Mesh 网格中采样形成归一化网络直线,对环境模型构建实体的每个顶点Z 轴方向进行流线型放大处理,得到水面舰艇防御系统的视觉参数关系模型如图2 所示。
图2 水面舰艇防御系统的视觉参数关系模型Fig.2 Surface ship defence system visual parameter relation model
结合在Lynx Prime 面板中需要定义一个海洋舰船MarineShip 的实例,由海洋环境模拟的真实度很大程度上决定于网格的分辨率设置,在最高分辨率设计方面,取决于生成算法和测试点位置等2 个因素,在此,设定的最高分辨率为32 ×32,LOD 可以分为5 级。
采用多线程生成算法描述如下:在Multigen Terrain 模块下,在多线程技术引导下,进行模块化划分,实现数据格式转化,海底地形视景高分辨率生成算法描述如下:
pMarine - >setSeaState (4);//设置适合的纹理类型
pMarine- >setSurfaceWindSpeed (19.000000f);//设置风速,根据5 级海况的大致情形设置19.000000f
pMarine- >setDominantWaveDirection (45.00000f);//设置波浪方向为45°
pMarine- >setSignificantWaveHeight (1.828800f );//设置波高为1.828800f
以4 级海况为例,在该面板上设置 Bow Parameter 中的首浪扩散角为10°、干舷系数4、船首偏移70,浪宽系数3,基于LOD (Level of Detail)技术,在海洋拓扑结构中进行分辨率为64 ×64 的多分辨率拓扑,模拟出的三维虚拟海洋效果图,引入天历表模型时区概念,通过创建光源,使视景背景的可见度能随着环境变化而改变,光源设置包括位置设置和光照范围设置。
把三维虚拟海洋图像仿真应用在舰艇视觉防御系统中,本系统的程序流程如图3 所示。
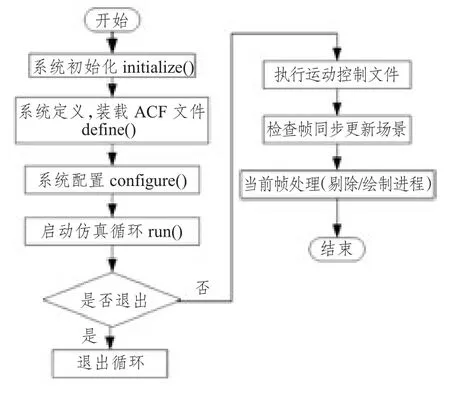
图3 系统实现流程Fig.3 System implementation process
4 仿真结果与性能分析
为了测试本文在实现三维虚拟海洋图像仿真和舰艇视觉防御系统应用中的性能,进行仿真实验。实验的计算机配置是Inter (R)Core(TM)i3 -2130.3.40 GHz CPU,4 GB RAM。图形数据库中包括6 000幅图像,包含多种不同的类别,其中单个类别的图像数20 ~180 不等,系统开发的过程中,需要将相关的信号参量估计算法嵌入到视景仿真过程中,由于现有的大部分算法都是采用Matlab 编程实现,不能被Visual C + + 直接使用,这就需要VC 和Matlab 混合编程来实现。采用本文设计的算法进行三维虚拟海洋的图像仿真结果,并应用到舰艇视觉系统中,得到主界面如图4 所示。
分析图4 结果可见,采用本方法进行三维虚拟海洋图像虚拟像是仿真,能有效实现对不同航行状态下的水面舰艇三维虚拟海洋的控制仿真,通过分析三维虚拟海洋,使用Vega Prime 视景仿真平台的Marine 模块模拟了三维动态海洋环境,在此基础上进行舰艇视觉下的防御系统视景仿真,得到舰艇直航和转弯是的视景仿真结果如图5 和图6 所示。
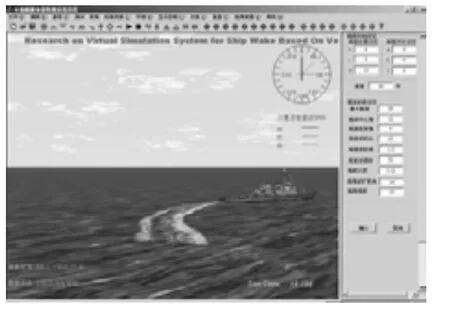
图4 基于三维虚拟海洋图像仿真的舰艇被动防御系统Fig.4 Image simulation based on 3 d virtual ocean ships passive defense system

图5 舰艇视觉中的直航效果仿真Fig.5 Ships direct effect of visual simulation

图6 舰艇转弯视景仿真图Fig.6 Vessels turning visual simulation diagram
通过上述仿真结果可见,三维虚拟海洋具有较好的实时视景仿真渲染效果,采用本文方法进行三维虚拟海洋仿真,视点转换和视点控制流畅,仪表和参数信息显示准确,实现了三维虚拟海洋和尾流效果的逼真模拟,提高了在三维海洋环境中实现舰艇视觉仿真的可观性和可靠性。
5 结 语
本文提出一种基于海洋拓扑结构网孔分解的三维虚拟海洋仿真技术并应用在舰艇的被动防御视觉系统中。首先构建三维海洋环境下舰艇的视觉控制模型,在MPI 的视景仿真渲染工具Vega Prime 中进行海洋三维视景建模,采用海洋拓扑结构网孔分解算法进行三维虚拟海洋视景仿真方法改进,最后在舰艇防御视觉系统中实现舰艇防御三维视景仿真,实验结果表明,采用本文方法,三维虚拟海洋具有较好的实时视景仿真渲染效果,视点转换和视点控制流畅,提高了在三维海洋环境中实现舰艇视觉仿真的可观性和可靠性。
[1]李计添,何永强,陈财森,等.一种基于灰度投影算法的车载电子稳像方法[J].红外技术,2010,32(6):328-332.LI Ji-tian,HE Yong-qiang,CHEN Cai-sen,et al.A kind of vehicle electronic stability like method based on gray projection algorithm[J].Infrared Technology,2010,32(6):328 -332.
[2]李志丹,和红杰,尹忠科,等.基于块结构稀疏度的自适应图像修复算法[J].电子学报,2013,41(3):549 -554.LI Zhi-dan,HE Hong-jie,YI Zhong-ke,et al.Based on sparse block structure adaptive image restoration algorithm[J].Journal of Electronics,2013,9(3):549 -554.
[3]杜辉.基于小波变换的彩色图像中快速人脸检测算法[J].科技通报,2012,12(28):89 -90.DU Hui.Color image based on wavelet transform in the fast face detection algorithm[J].Science and Technology,2012,12(28):89 -90.
[4]王俊,朱利.基于图像匹配-点云融合的建筑物立面三维重建[J].计算机学报,2012,35(10):2072 -2079.WANG Jun,ZHU Li.Point cloud based on image matching fusion of building facade 3 d reconstruction[J].Journal of Computers,2012,35(10):2072 -2079.
[5]PARIS S,DURAND F.A fast approximation of the bilateral filter using a signal processing approach[J].International Journal of Computer Vision,2009,81(1):24 -52.
[6]迟春梅,高峰,王金鹤.考虑环境参量的多线程高分辨率海洋视景仿真[J].科技通报,2014,30(6).CHI Chun-mei,GAO Feng,WANG Jin-he.Considering environment parameter of multithreading high-resolution Marine visual simulation[J].Bulletion of Science and Technology,2014,30(6).
[7]XU Zong-ben,Sun Jian.Image inpainting by patch propagation using patch sparsity[J].IEEE Transaction on Image Processing,2010,19(5):1153 -1165.
[8]罗泽峰,单广超.基于网络和虚拟多媒体技术的海战平台视景仿真实现[J].物联网技术,2015,5(3):91 -92,94.LUO Ze-feng,SHAN Guang-chao.The naval battle of multimedia technology based on network and virtual visual simulation platform to achieve[J].Journal of Internet Technology,2015,5(3):91 -92.
[9]赵威.基于鱼雷自导的舰船尾流回波模型建立方法[J].舰船电子工程,2013,33(4):81 -83.ZHAO Wei.Methods based on torpedo homing ship wake echo model[J].Journal of Ship Electronic Engineering,2013(4):81 -83.
[10]葛立志.基于全弹道控制分析的水下航行器攻击模型视景仿真[J].舰船电子工程,2015,35(3):137 -141.GE Li-zhi.Based on the analysis of the trajectory control of underwater vehicle attack model visual simulation[J].Journal of Electronic Engineering,2015,35(3):137 -141.
