舰船电机控制系统中的不稳定数据挖掘方法研究
2015-12-20李玮瑶李圣普
李玮瑶,李圣普
(平顶山学院 计算机科学与技术学院,河南 平顶山467000)
0 引 言
舰船电机控制系统是保障舰船稳定可靠运行的核心部分,舰船电机长期处于高温、高盐等恶劣的工作环境下,导致舰船控制系统故障频发,工作状态不稳定。对舰船电机控制系统中的不稳定数据进行有效挖掘是实现故障诊断和稳定控制的基础,研究舰船电机控制系统的不稳定数据挖掘方法具有重要意义[1]。
传统方法中,对舰船电机控制系统的不稳定数据挖掘方法主要可以分为基于时域分析的不稳定数据挖掘法、基于频域分析的不稳定数据挖掘法、基于统计分析的不稳定数据挖掘法、基于信息论分析的不稳定数据挖掘法、模式识别方法以及人工智能方法等,结合故障信号处理和特征提取算法[2],把人工神经网络和专家系统识别方法引入到舰船电机控制系统的不稳定数据挖掘应用领域中,取得了较好的应用和研究成果。其中,文献[3]提出一种基于Hilbert 谱提取舰船电机控制系统的异常数据挖掘算法,实现故障诊断和稳定性控制,但是该算法具有计算量大、计算开销复杂的问题;文献[4]提出一种基于舰船电机控制系统的状态信息特征时间尺度分解的数据挖掘算法,实现对舰船电机控制系统的不稳定数据的挖掘,提取电机控制系统故障信号的故障特征,为舰船电机控制系统的模式识别和故障分类识别提供数据基础。但该算法需要进行多层分解,计算复杂,应用价值不好。文献[5]提出的舰船电机控制系统不稳定数据挖掘方法采用正态相关状态特征提取方法,随着不稳定数据的耦合性增强,正态相关状态特征不能完全反应舰船电机控制系统的不稳定状态,挖掘性能不好[6-8]。针对上述问题,本文提出一种基于功率谱密度估计的舰船电机控制系统中的不稳定数据挖掘方法。
1 信号处理模型构建及时频域描述分析
1.1 信号模型构建
采用数据挖掘算法[9],进行舰船电机控制系统状态识别和故障诊断的系统运行流程如图1 所示。

图1 基于不稳定数据挖掘的舰船电机控制系统状态识别Fig.1 Ship motor control system based on data mining unstable state recognition
可以看出,舰船电机控制系统状态识别和故障诊断的第一步是信号的检测采集,采用信号处理算法实现对舰船电机控制系统状态识别。能否有效提取具有区分不稳定运行专题类别的特征决定是能否有效进行故障诊断识别的关键。本文对舰船电机控制系统故障诊断采用辐射噪声信号为采集对象,舰船电机控制系统的辐射噪声包括电机控制系统进气、排气、振动等运行过程中产生的噪声,以此为原始数据进行不稳定信息数据挖掘,实现状态识别。在此,首先进行信号模型构建,假设舰船电机控制系统辐射噪声原始数据信息表达式为:

其中:

式中:a(t)和θ(t)分别为舰船电机控制系统辐射噪声的原始数据的包络和信号频谱相位信息;a(t)和θ(t)都是舰船电机控制系统噪声信号的时间序列函数,得到舰船电机控制系统不稳定信息的信号解析表达式为z(t),它是x(t)与1/t 的卷积,为:

其中,f 为数据采集频率,τ 为数据采集时间延迟,把电机控制系统故障信号的时域和频域结合在一起,通过时间加窗分析保留或放大信号在此段时间窗内的时频分量。以此为基础,描述舰船不稳定数据信号的各频率分量的时频变换关系,通过构建窗函数的长度与频谱图,得到一个能反映舰船电机控制系统的非平稳信号特征的时频联合分布函数WTf(a,τ):

其中,x(t)为不稳定数据信息可调窗口平方可积函数;ψ(t)为基小波函数,2 个参数a 和τ 有关。不断改变中心频率,通过在时间轴上连续滑动窗口,通过时频加窗,使用时间尺度函数对数据进行分段处理,使得信号分段平稳,使用窄时域窗,得到舰船电机控制系统中的不稳定数据信号x(t)的短时傅里叶变换为:

式中:x(τ)为极值点的时间间隔;f 为频域特征;t 为局部振荡时间。
通过短时傅里叶变换和能量密度谱处理,实现对舰船电机控制系统的不稳定数据的信号模型构建,以此为基础进行特征提取和数据挖掘。
1.2 时频域描述
在上述信号模型构建的基础上,对舰船电机控制系统的不稳定数据进行时频分析和时频域描述,电机控制系统故障信号在本文中反映为时间的函数,采用小波分析方法建立一组相对稳定的短时信号模型进行舰船电机控制系统的不稳定数据的数据挖掘,这一过程描述如图2 所示。

图2 舰船电机控制系统中的不稳定数据相对稳定的短时信号模型Fig.2 Ships in the motor control system is not stable data relatively stable short-term signal model
对于舰船电机控制系统,辐射的不稳定状态噪声数据信号具有非稳态和非线性特性,任意原始的电机控制系统故障信号x(t),得到电机控制系统不稳定数据信号的能量密度谱为:

其中,STFT(. )为取瞬时频率,采用极值尺度参数定义固有模态函数(Intrinsic mode function,IMF)进行经验模态分解(Empirical mode decomposition,EMD),使得加窗保留了时间窗内的时频关系,揭示了电机控制系统辐射噪声信号的内部特征,舰船电机控制系统的瞬时频率实信号的表达式具有如下形式:

通过时频域描述,得到复信号的表达式为:

受外部噪声干扰的情况下,电机控制系统不稳定数据信号在本文中反映为时间的函数,电机感应尺度平移平面上平移向量为:

其中,P 为电机控制系统的输入功率;x(τ)为双曲调频幅度,电机系统在t0时刻电流误差出现急剧变化,为了使电流矢量返回外边界圆,实现对电机控制系统的不稳定数据挖掘,按照Hilbert 相位求导,舰船电机控制的不稳定数据在整个电机状态运行模态中零点数与极值点个数相等,由此得到瞬时频率的估计为:

其中,i 为采样时间序列;ai为幅值;p 为不稳定数据的中位数,通过短时傅里叶变换和能量密度谱处理,进行特征提取,实现数据挖掘。
2 功率谱密度特征提取和不稳定数据挖掘
2.1 功率谱密度特征提取
舰船电机控制系统不稳定数据具有非平稳时变特性,湮没在色噪声背景中,难以实现有效的数据挖掘,当前方法采用正态相关状态特征提取方法,随着不稳定数据的耦合性增强,正态相关状态特征不能完全反应舰船电机控制系统的不稳定状态,挖掘性能不好。为了克服传统方法的弊端,提出一种基于功率谱密度估计的舰船电机控制系统中的不稳定数据挖掘方法。假设待挖掘的舰船电机控制系统不稳定数据的相关噪声分布p(ek| vk)的方差和均值服从分布如下:

采用固有模态函数变换分析舰船电机控制系统不稳定数据的极限幅频特性,得到瞬时频率的估计为:

其中,算子R(·)为取复数的实部;a(t)为取傅氏谱在频域内的功率谱。在构成的多个窄带信号中分析舰船电机控制系统不稳定数据的频谱特征,得到离散时间舰船电机控制系统不稳定数据序列的频谱畸变部分估计为:

上式可见,要求a(t)的变化应该足够缓慢以使其傅氏谱与cosθ(t)的傅氏谱在频域不相交,考虑一种简单的功率谱密度匹配滤波算法,对干扰信息进行数据滤波,得到滤波器的传递函数:

其中,相应的幅值和相位函数的频率参数为a,带宽参数为r,当a 变化时,构成的正交项与信号实际的正交项相交,功率谱密度估计值传递给采样频率,实现功率谱密度特征提取。
2.2 不稳定数据挖掘
通过上述功率谱密度特征提取结果,进行舰船电机控制系统不稳定数据的频谱检测,得到的舰船电机控制系统不稳定数据信号频谱特征形式为:
其中,ζ(n)为噪声;Φk为不稳定数据信息去干扰处理后相位信息;ωk为特征偏转,假设舰船电机控制系统数据传输通信信道为连续系统,舰船电机控制系统不稳定数据的频域模型表示为:

式中,h(. )为舰船电机控制系统不稳定数据时间窗口函数;ωn为测量误差。不稳定数据信息库数据集X={x1,x2,…,xn},n 为数据集X 的数目,舰船电机控制系统不稳定数据时间序列的延迟时间互信息为:

其中,τ 为采样时间延迟;pi为相应的幅值信息量;pj为正交项Qx(t)的傅氏谱,基于功率谱密度估计,实现对舰船电机控制系统中的不稳定数据的经验模态分解和多分量幅度调制,实现对舰船电机控制系统的不稳定该数据的有效挖掘。舰船电机控制系统不稳定数据挖掘流程如图3 所示。

图3 舰船电机控制系统不稳定数据挖掘流程Fig.3 The data mining process for the control system of ship motor
3 仿真实验与结果分析
为了测试本文算法在实现舰船电机控制系统不稳定数据挖掘和舰船电机的故障诊断及稳定性控制中的性能,进行仿真实验。实验建立在某大型舰船电机控制系统平台上,使用本实验室研制的TED2012 电机控制系统的噪声数据采集仪器进行原始数据采集,在舰船电机的缸盖处进行信号采集,得到舰船电机控制系统的运行状态信息原始数据采样结果如图4 所示。
根据图3 给出的原始数据作为测试样本数据集,进行舰船电机控制系统的不稳定数据的挖掘仿真,假设不稳定数据挖掘归一化初始频率分别为:f11=0.05,f12= 0.15,舰船电机控制系统不稳定数据去干扰滤波的归一化终止频率分别为:f21= 0.3,f22=0.5,舰船电机工作环境噪声为高斯白噪声,不稳定数据的采样点数N = 256。在舰船电机控制系统不稳定数据挖掘参数设计中,取A = 200 ×200 m2,N =600,800 和1000 时,进行功率谱密度估计和特征提取,得到上述3 个信道下的不稳定数据功率谱密度特征提取结果如图5 所示。

图4 舰船电机控制系统的运行状态信息原始数据采样Fig.4 Ships motor control system running status information of the original data sampling
采用本文算法,能有效实现对舰船电机控制系统不稳定数据功率谱密度特征提取,数据挖掘精度较高,为了定量分析本文算法在进行舰船电机控制系统不稳定数据挖掘的性能,采用不同算法,在不同信噪比SNR 下,通过舰船电机控制系统不稳定数据的挖掘,以对不稳定数据的准确挖掘检测概率为测试指标,通过20 000 次蒙特卡罗实验,得到仿真结果如图5 所示,采用本文算法有效提高了对舰船电机控制系统不稳定数据的准确挖掘和检测概率,精度较高,抗干扰能力较强。

图5 舰船电机控制系统不稳定数据功率谱密度特征提取结果Fig.5 Ships motor control system unstable power spectral density data feature extraction results
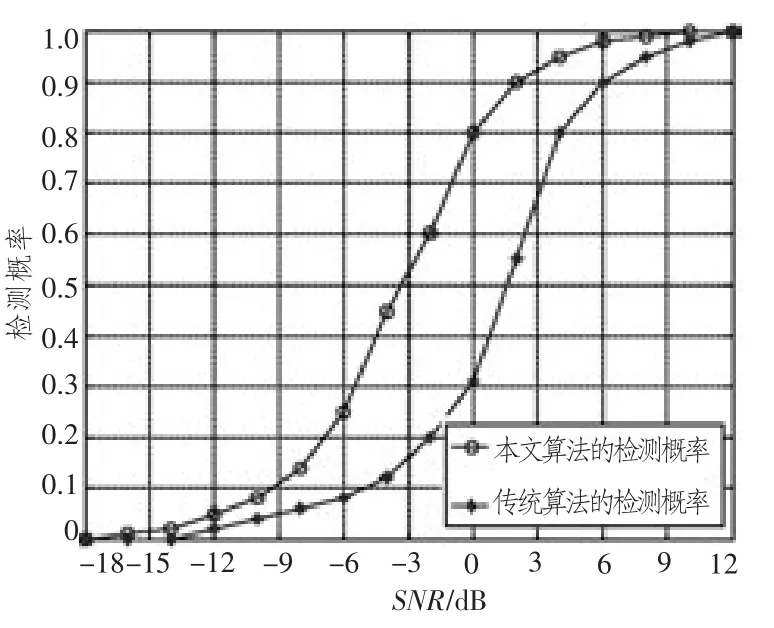
图6 数据挖掘性能对比Fig.6 Performance contrast data mining
4 结 语
本文提出一种基于功率谱密度估计的舰船电机控制系统中的不稳定数据挖掘方法。首先对舰船电机控制系统中的不稳定数据进行信息与信号模型构建,在信号模型构建的基础上,对舰船电机控制系统中的不稳定数据进行时域和频域分析与描述,在时频域中进行功率谱密度特征提取,实现对舰船电机控制系统中的不稳定数据的经验模态分解和多分量幅度调制,提高功率谱密度特征对舰船电机控制系统中的不稳定数据的表征能力,提高数据挖掘性能,仿真结果表明,采用该算法能有效提高舰船电机控制系统不稳定数据挖掘精度,准确挖掘和检测概率较高,为实现对舰船电机控制系统的运行状态监测和故障诊断分析奠定基础。
[1]陈杰,陈冉,陈家伟,等.变速风力发电机组的模糊-单神经元PID 控制[J].中国电机工程学报,2011,31(27):88 -94.
[2]张小冰.变频器优化控制方法研究与仿真[J].计算机仿真,2011,28(11):409 -412.
[3]齐昕,周晓敏,马祥华,等.感应电机预测控制改进算法[J].电机与控制学报,2013,17(3):62 -69.
[4]宋钰,何小利,何先波,等.基于云计算神经网络调度算法研究[J].计算机仿真,2009,4:78 -79.
[5]王锋,孙翠华.汽车电机控制系统故障征兆挖掘技术的研究与仿真[J].计算机仿真,2013,30(10):229 -232.
[6]杨俊,周丙寅,张毅,等.基于递归图分析的压缩机故障诊断方法研究[J].计算机与数字工程,2013,41(6):984 -986.
[7]尹刚,张英堂,李志宁,等.基于MSPCA 的缸盖振动信号特征增强方法研究[J].振动与冲击,2013,32(6):143 -147.
[8]邢长征,刘剑.基于近邻传播与密度相融合的进化数据流聚类算法[J].计算机应用,2015,35(7):1927 -1932.
[9]付主木,曹晶,王晓红.具有末端落角约束的空地导弹滑模变结构制导律设计[J].信息与控制,2015,44(3):291 -297,302.
