运动模糊图像点扩散函数的参数辨识
2015-12-20刘红亮陈维义傅茂聪熊宏锦
刘红亮,陈维义,傅茂聪,熊宏锦
(1.海军工程大学 兵器工程系,湖北 武汉430033;2.海军装备部驻重庆地区军事代表局,重庆400042)
0 引 言
光电成像设备在舰船、车辆、飞机、导弹等航行体的侦查观测、目标识别、导航制导等过程中发挥着重要作用。但成像过程中,摄像设备与成像对象之间存在相对运动会造成图像退化,产生运动模糊[1]。运动模糊图像复原技术及其应用是当今图像处理领域的一个研究热点,而准确辨识点扩展函数(PSF)是进行运动模糊图像复原的关键。点扩散函数主要包含运动模糊角度和运动模糊长度2 个参数,针对点扩散函数的参数辨识问题人们进行了大量的研究和探索[2-3]。文献[4]提出基于方向微分的运动模糊方向鉴别方法,但这种方法不仅需要进行插值、微分等运算,计算量大,还会受到图像本身的统计特性影响很大。文献[5]通过计算运动模糊退图像自相关函数的最大值和最小值来估计运动模糊长度,但这种方法没有充分利用运动模糊图像的频域特性,直观性不强,而且计算量也比较大,实时性不强。
本文在对运动模糊图像的退化模型及点扩展函数进行分析的基础上,采用基于Radon 变换的方法确定运动模糊角度,并采用对运动模糊图像频谱图投影求和的方法确定其运动模糊长度,然后结合快艇图像的仿真实验分析点扩展函数参数辨识的结果。实验表明,本文方法形象直观,计算量小,能够满足点扩展函数参数辨识精度的要求。
1 运动模糊图像退化模型
在线性平移空间不变运动模糊系统中,运动模糊图像g(x,y)可表示为原始图像f(x,y)和点扩散函数h(x,y)的二维卷积[1]:

其中n(x,y)为加性噪声。为便于计算,通常不考虑噪声对运动模糊图像的影响,即

对上式两边进行傅里叶变换,有

从物理现象上看,运动模糊图像实际上是同一景物图像经过一系列的距离延迟和叠加后最终形成的图像。快艇图像(512 ×512 像素)及其运动模糊图像见图1。设在摄像设备的积分时间T 内,成像对象在水平方向和垂直方向的运动距离分别为ax和ay,则运动模糊图像可表示为[6]

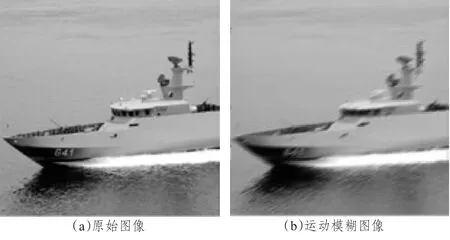
图1 快艇图像及其运动模糊图像Fig.1 Speed boat image and motion blurred image
对式(4)进行傅里叶变换得

又因G(u,v)=F(u,v)H(u,v),则点扩散函数为

设数字图像尺寸为M × N,上式的离散形式为

2 点扩散函数的参数辨识
根据运动模糊图像的成像原理,可建立点扩展函数模型。设运动模糊长度为L,运动模糊角度为θ,则点扩散函数h(x,y)的一般形式如下所示[2]:

因此,水平方向匀速运动的点扩展函数为
可见,点扩散函数的参数辨识就是确定其运动模糊角度θ 和运动模糊长度L 的过程。
2.1 运动模糊角度θ 的确定
运动模糊角度的确定是点扩散函数的参数辨识过程中最重要的步骤之一。由式(7)可得

可 见, 当 uax/M + vay/N 等 于 0 时,取得最大值1,此时,G(u,v)显示为亮条纹;当 uax/M + vay/N 等于非零整数时,取得最小值0,此时,G(u,v)显示为暗条纹;由于内包含正弦周期函数,即使uax/M + vay/N 无法恰好等于整数,运动模糊图像的频谱图G(u,v)也依然会呈现规则的明暗相间条纹状。运动模糊长度L 为10 像素,运动模糊角度θ 分别为30°和60°的频谱图G(u,v),如图2 所示。
显然,直线uax/M + vay/N = k(k 为整数)的斜率就是运动模糊图像频谱图暗条纹倾斜角ψ 的正切值,其与运动模糊角度θ 的关系可表示为

图2 不同模糊角度的运动模糊图像频谱图Fig.2 Spectrogram of motion blurred image with different motion blurred direction
因此,只要通过运动模糊图像的频谱图求出其暗条纹倾斜角ψ,即可检测出运动模糊角度θ。Radon变换可以用来检测图像中直线的角度,图像f(x,y)的Radon 变换代表其在角度为ψ,与原点距离为ρ 的直线上的投影[7]:

其中δ()为脉冲函数。
运动模糊图像的频谱图沿暗条纹倾斜角ψ 方向的线积分会取得最大值。因此对运动模糊图像的频谱图在0° ~179°范围内依次进行Radon 变换,变换结果最大值对应的角度即为与暗条纹倾斜角ψ垂直的角度,从而可以求出暗条纹斜角ψ 和运动模糊角度θ。显然,在图像尺寸M = N 的情况下,Radon 变换极大值曲线中最大值对应的角度即为运动模糊角度θ。图3 是快艇图像在运动模糊长度L为10 像素,运动模糊角度θ 为30°时的运动模糊图像频谱图的Radon 变换结果。在依次求得0° ~179°对应的Radon 变换极大值后,即可确定运动模糊图像频谱图在不同角度下Radon 变换的极大值曲线(见图4)。频谱图Radon 变换极大值曲线在32°时取得最大值,因此可采用基于Radon 变换的方法确定运动模糊角度。
2.2 运动模糊长度L 的确定
由运动模糊图像准确地估计出运动模糊角度之后,可以通过图像旋转,将运动模糊角度旋转

图3 频谱图的Radon 变换Fig.3 Radon transform of spectrogram

图4 频谱图Radon 变换极大值曲线Fig.4 Maximum curve of Radon transform
到水平轴方向,即将点扩散函数的运动模糊角度θ旋转为0,从而将对应的运动模糊点扩散函数转变为一维的(如式(9)所示),降低了运动模糊长度的求解难度。由于f(x,y)和F(u,v)的尺寸均为M ×N,式(9)必须扩充为如下形式

该矩阵的尺寸为M × N,第一行有L 个1/L,其他位置补0,对其进行离散傅里叶变换得
可见,当u 等于0 时,H(u,v)= 1;当u 不等于0 时,当uL/M 为整数n 即u1= nM/L 时,H(u,v)=0,此时,运动模糊图像的频谱图G(u,v)会呈现暗条纹;当uL/M 为整数n + 1即u2= (n +1)M/L 时,H(u,v)= 0,此时,运动模糊图像的频谱图G(u,v)仍会呈现暗条纹。因此,只要计算出运动模糊图像的频谱图G(u,v)的任意2条相邻暗条纹的间距u2- u1,即可确定运动模糊长度L = M/(u2- u1)。这说明,在频谱图尺寸不变的情况下,频谱图中任意2 条相邻暗条纹的间距与运动模糊长度成反比。
图5 是快艇图像在运动模糊角度θ 为0,运动模糊长度分别为10 像素和20 像素时的运动模糊图像的频谱图,通过移位使u = 0,v = 0 位于频谱图的中心位置,因此频谱图的中心为亮条纹,该亮条纹的宽度为任意2 条相邻暗条纹的间距的2 倍。
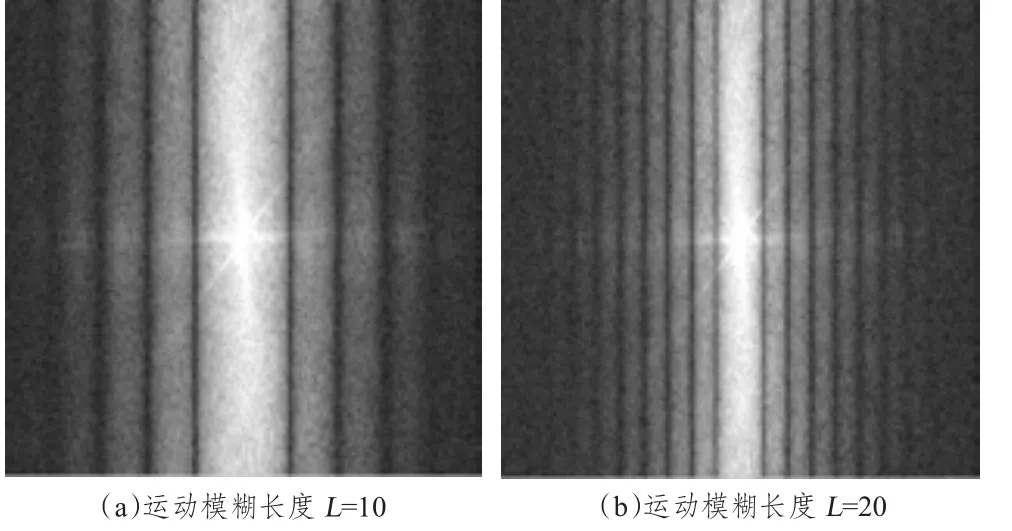
图5 不同模糊长度的运动模糊图像频谱图Fig.5 Spectrogram of motion blurred image with different motion blurred length
由上文分析可知,获得频谱图中心亮条纹的宽度是确定运动模糊长度L 的关键。为了减小随机性误差,利用频谱图整列的统计信息,对图5(a)沿列方向投影求和(见图6)。显然求和曲线的最大值对应着频谱图中心亮条纹,与最大值距离最近的2 个极小值分居其左右两侧,分别对应着频谱图中的2条暗条纹。因此只要求出这2 个极小值的横坐标,即可确定频谱图中心亮条纹的宽度,进而确定运动模糊长度L。

图6 频谱图沿列方向投影求和曲线Fig.6 Projective summation curve of the spectrogram
由于运动模糊长度与频谱图中心亮条纹的宽度成反比,当中心亮条纹的宽度为频谱图的行数M时,频谱图中任意2 条相邻暗条纹的间距就是M/2,此时,可以确定运动模糊长度为2 像素。因此,本文这种通过对运动模糊图像频谱图投影求和来确定运动模糊长度的算法只适用于运动模糊长度大于2像素的情况。
3 仿真实验及分析
为了验证本文所提点扩散函数的参数 (运动模糊角度和运动模糊长度)辨识算法的有效性,我们采用标准快艇图像进行测试。首先进行运动模糊角度θ 的求解测试。将快艇图像的运动模糊长度L 固定为10 像素,将其运动模糊角度θ 依次设为0°,10°,20°,…,170°,用本文方法依次求出其运动模糊角度计算误差,测设结果见图7。可见,在运动模糊长度为10 像素的情况下,基于Radon 变换的方法可以较为准确地确定出运动模糊图像的运动模糊角度,其计算误差绝对值不大于3°。在其他运动模糊长度情况下,该运动模糊角度求解算法具有类似的测设结果。
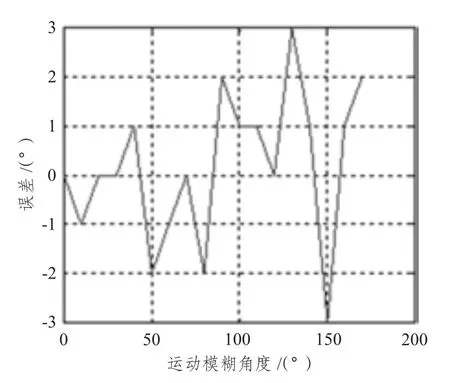
图7 运动模糊角度计算误差Fig.7 Error of motion blurred direction

表1 运动模糊长度计算结果/ (像素)Tab.1 Error of motion blurred length/ (pixel)
在进行运动模糊长度L 的求解测试时,将快艇图像的运动模糊角度θ 固定为10°,本文方法在不同运动模糊长度下的计算结果见表1。由表1 可知,当运动模糊长度大于2 像素时,实验结果与真实值的绝对误差不超过0.3 像素,因此,本文算法能够有效确定运动模糊长度。在其他运动模糊角度情况下,该运动模糊长度求解算法具有类似的测设结果。
当运动模糊角度为10°,运动模糊长度为2 像素时,对频谱图沿列方向投影求和(见图8)。对比图6 (其运动模糊角度为0°,模糊长度为10 像素)可知,当运动模糊长度为2 像素时,频谱图沿列方向投影求和曲线不存在2 个极小值,因此无法得到频谱图中心亮条纹的宽度和运动模糊长度L。实验结果与第2.2 节的理论分析一致。

图8 投影求和曲线(L =2 像素)Fig.8 Projective summation curve (L =2 pixels)
4 结 语
运动模糊图像复原的基础是点扩散函数的参数辨识。本文在运动模糊图像退化模型的基础上,分别提出了点扩散函数的运动模糊角度和运动模糊长度的辨识算法,并以快艇图像为试验对象,对辨识算法进行了仿真验证。仿真实验表明,基于Radon变换的方法可以较为准确地确定出点扩散函数的运动模糊角度,其计算绝对误差不大于3°;在运动模糊角度已知的前提下,采用对频谱图投影求和的方法能够有效确定点扩散函数的运动模糊长度,其计算绝对误差不超过0.2 像素。相较于其他点扩散函数的参数辨识算法,本文算法简单直观,计算量小,实时性强,能够满足运动模糊图像复原系统的技术要求。不足之处是,本文算法在求解运动模糊长度时,只适用于运动模糊长度大于2 像素的情况,且运动模糊长度的精度受到运动模糊角度的精度的影响,这正是下一步研究工作的重点。
[1]郑辉.运动模糊图像复原技术的研究与实现[D].长沙:国防科技大学,2007.ZHENG Hui.Research and implementation of technology for restoration of motion-blurred images[D].Changsha:National University of Defense Technology,2007.
[2]张朝阳,廖广军,戚其丰.直线运动模糊图像的点扩展函数的研究[C]//第二十七届中国控制会议论文集,2008:357-360.ZHANG Chao-yang,LIAO Guang-jun,QI Qi-feng.On PSF for lined motion blurred image[C]//Proceedings of the 27th Chinese Control Conference,2008:357 -360.
[3]RATNAKAR D,BANSHIDHAR M.Motion blur parameters estimation for image restoration[J].Optik-International Journal for Light and Electron Optics,2014,125(5):1634-1640.
[4]陈前荣,陆启生,成礼智.基于方向微分的运动模糊方向鉴别[J].中国图象图形学报,2005,10(5):590 -595.CHEN Qian-rong, LU Qi-sheng, CHENG Li-zhi.Identification of motion blur direction from motion blurred image by direction derivation method[J].Journal of Image and Graphics,2005,10(5):590 -595.
[5]梁炯,许廷发,石明珠,等.一种提高匀速直线运动参数辨识精度的方法[J].北京理工大学学报,2012,32(8):818-823.LIANG Jiong,XU Ting-fa,SHI Ming-zhu,et al.A method to improve accuracy of parameter identification for single image blurred by uniform linear motion[J].Transactions of Beijing Institute of Technology,2012,32(8):818 -823.
[6]MOHSEN E M,MANSOUR J.Motion blur identification in noisy images using mathematical models and statistical measures[J].Pattern Recognition,2007,40(7):1946-1957.
[7]段若颖,堪德荣,蒋玉萍,等.Radon 变换对短模糊尺度下匀速直线运动模糊参数的准确估计[J].兵工学报,2013,34(10):1231 -1235.DUAN Ruo-ying,CHEN De-rong,JIANG Yu-ping,et al.Accurate estimation of motion blur parameters at short blurred extent based on radon transform [J].Acta Armamentarii,2013,34(10):1231 -1235.
