舰船感应磁性的磁异常信号特征
2015-12-20王光辉郭正东喻利军
王光辉,朱 海,郭正东,喻利军
(1.海军潜艇学院,山东 青岛266042;2.中国人民解放军92196 部队,山东 青岛266000)
0 引 言
钢铁建造的舰船在地磁作用下会被磁化,从而扰动地球磁场,产生磁异常信号,该信号是磁引信水雷、航空磁异常探潜系统等所依赖的目标信息源[1-3]。根据钢铁的铁磁性质不同,舰船的磁性可分为:永久磁性和感应磁性。采用消磁站外消磁方式,可以有效地降低永久磁性;但对于感应磁性的控制,只能利用舰船消磁系统(内消磁)实现[4]。因此,对于没有装备内消磁系统的舰船而言,实施外消磁后,感应磁性就成为其主要磁性成分,直接决定了磁性目标特征[5]。
航向的变化造成舰船感应磁性的变化,从而影响其磁异常信号分布。本文针对舰船的感应磁性,研究了不同磁航向情况下的磁异常信号分布,对于认识舰船的磁性目标特征具有重要意义。
1 相关模型
1.1 相关坐标系
如图1 所示,建立地理坐标系XnYnZn(北-东-下)、地磁坐标系XmYmZm(磁北-磁东-下)和甲板坐标系XbYbZb(首-右-下)。忽略舰船姿态变化,地理坐标系、地磁坐标系、甲板坐标系之间分别仅仅存在一个旋转角度(磁差Var、磁航向MC)。
1.2 地磁模型
在地理坐标系中,地磁主磁场(X,Y,Z)可由国际地磁参考场模型 (International Geomagnetic Reference Field,IGRF-11)获得[6]:

图1 三种坐标系Fig.1 Three reference frames

式中:R 为国际参考地球半径,为6 371.2 km;r 为地心距,km;θ 为当地余纬度;λ 为当地经度;,为n 阶m 次高斯球谐系数,nT,由国际地磁学与高空物理学协会发布;Pmn(cosθ)为施密特准归一化的缔合勒让德函数。
则在地磁坐标系中,地磁分量可表示为:
1.3 磁异常信号模型
由于矢量磁传感器的测量结果对传感器的姿态非常敏感,受探测平台姿态测量精度的限制,难以获取较为准确的目标磁场。因此,标量磁力仪是目前常用的远场磁异常探测手段。远场情况下,舰船磁性可等效为位于甲板坐标系原点的磁偶极子,其产生的磁场可表示为

式中:m 为磁偶极子的磁矩;rb为甲板坐标系中场点的位矢。
对于标量探测,考虑到舰船磁场远小于地球磁场的实际情况,舰船磁异常信号可表示为

式中:B 为舰船产生的磁场;BE为地球磁场。
2 舰船感应磁性
考虑地球磁场属于弱磁的实际情况,舰船的感应磁化过程可看作线性过程[7],因此,在甲板坐标系中,感应磁性各分量与相应的地磁分量成正比,其可表示为

在地磁坐标系中,感应磁性可表示为

当场点距离舰船较远时,其磁性可等效为一个旋转椭球体。根据铁磁质磁化理论,具有一定形状的物体磁化时,内部要产生一个与物体形状相关的去磁场,造成使物体磁化的磁场要比外加磁场弱[8]。因此,旋转椭球体各个方向的磁化能力并不相同,3 个主轴方向的磁化系数满足
式中:Nx,Ny和Nz为椭球体纵向、横向、垂向去磁系数;λ 为椭球形状系数,等于长半轴与短半轴之比。
3 仿真分析
不失一般性,舰船的长宽比取为10;艇铁的相对磁导率取为200,相应椭球体纵向、横向、垂向去磁系数为0.02、0.49、0.49,纵向、横向、垂向磁化系数之比为19.55∶1∶1;地球磁场水平分量和垂直分量分别取值为30 715 nT、41 526 nT (中纬度地磁场);纵向感应磁矩的最大值为2 ×105A. m2(典型舰船的等效磁矩)。在舰船上方200 m 高度的水平平面内,解算获得的地磁坐标系中舰船的磁异常信号分布如图2 所示。舰船磁航向相差180°时磁异常信号的分布相同;信号分为正、负2 个区域,正值区域位于舰船南侧,负值区域位于舰船北侧;信号大致左右对称分布,对称轴在南北方向附近,其偏离南北方向的角度与舰船磁航向有关;信号强度受舰船磁航向变化影响显著,当舰船沿磁南、磁北航向时,磁异常信号最强,当舰船沿磁东、磁西航向时,磁异常信号最弱;不同方向的信号梯度不同,不论舰船航向如何,沿磁南、磁北方向的信号梯度均远大于沿磁东、磁西方向的信号梯度。
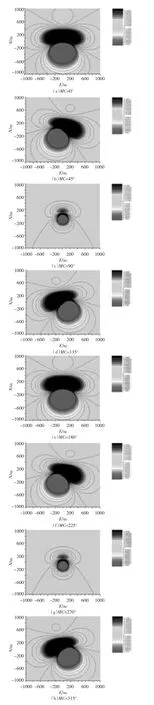
图2 舰船上方200 m 高度水平面内的磁异常信号分布Fig.2 The MAD signal distributing on the plane of 200 m above ship
4 结 语
在地磁场中,舰船感应磁性产生的磁异常信号与舰船的磁航向密切相关,当舰船沿磁东、磁西附近航行时,磁异常信号较弱;磁异常信号的水平变化方向性明显,沿磁南、磁北方向的磁异常信号梯度最大。为了减小舰船的磁异常信号,舰船应尽量沿磁东、磁西方向航行;为了提高对舰船的探测能力,应尽量沿磁南、磁北方向搜索。
[1]闫晓伟,段立召.舰船磁矩对反潜直升机磁探宽度的影响[J].船电技术,2013,33(2):18 -21,24.YAN Xiao-wei,DUAN Li-zhao.The effect of the submarine magnetic moment on helicopter magnetic anomaly detection width[J].Marine Electric & Electronic Technology,2013,33(2):18 -21,24.
[2]伍东,凌石超,王秀.舰船磁异常信号与方位对应关系的研究[J].舰船电子工程,2012,32(9):56 -58.
[3]王德强,余强.舰船磁场数值计算方法发展综述[J].舰船科学技术,2014,36(3):1 -6.
[4]刘大明.舰船消磁理论与方法[M].北京:国防工业出版社,2011.
[5]翁行泰,曹梅芬.潜艇感应磁场的三维有限元法计算研究[J].上海交通大学学报,1994,28(5):69 -76.
[6]DE S C. E. Ship motion prediction[R]. Dep. of Electrical and Computer Engineering,Univ. of Newcastle,NSW 2308,Australia(1987).
[7]冯彦,安振昌,孙涵,等.第11 代国际地磁参考场(IGRF-11)的比较分析. 地球物理学进展[J],2011,26(5):1528 -1534.FENG Yan,AN Zhen-chang,SUN Han,et al. Comparison and aanalysis of the 11th international geomagnetic reference field(IGRF11)[J]. Progress in Geophysics,2011,26(5):1528 -1534.
[8]叶平贤,龚沈光.舰船物理场[M].北京:兵器工业出版社,1992.
