船舶横倾姿态动态调整控制设计与仿真
2015-12-20方阳丽
方阳丽,唐 猛,罗 珊
(西南交通大学 机械工程学院 智能机电技术研究所,四川 成都610031)
0 引 言
船舶在航行中摇荡有横摇、纵摇、首摇、垂荡、纵荡及横荡6 个自由度,摇荡对船舶的适航性和安全航行产生了不利影响。因此,研究船的航行姿态、运动规律和影响因素,从而寻求有效方法来避免或减少船的摇荡成为热点研究课题。常用的减摇装置有舭龙骨、减摇鳍、减摇水舱、减摇舵等,这些减摇装置主要以减少横摇为目的,且都是以测量横摇角为基础的反馈控制系统。这类系统是在海浪作用于船并使船舶发生横摇后才采取的措施,属被动式控制。
实际海浪极不规则,很难建立精确的数学模型。为了研究波浪对船的影响,研究者通过对随机海浪的研究,根据观测数据分析海浪的统计规律和谱密度,提出描述海浪的模型,基本都是在特定海域海浪的基础上制定“半经验半理论的海浪谱公式”,目前使用比较多的是波浪谱公式。
本文在横摇模型基础上考虑海浪的影响,设计了Kalman 滤波器用于控制系统。对船舶及海浪选取确定参数,在模拟真实海浪环境进行仿真,用试验数据验证控制算法的有效性和系统的合理性。
1 模型介绍
船舶具有大惯性特点,其浮态位置对整个运动系统有着极大影响。当发生横摇时,如何控制从而减摇成为研究的重点。本文基于此目的建立船舶运动模型进行仿真。
1.1 横摇模型
目前船舶姿态调整主要研究对象是横摇[1]。实际船舶横摇是非线性,当小角度横摇时可以假设运动为线性的。本文应用Connolly 假设[2]建立载荷力矩作用下船舶线性横摇运动数学模型。模型建立基础为:惯性力矩+阻尼力矩+复原力矩=载荷力矩。

式中:φ 为船舶横摇角;Jφ为船舶转动惯量;ΔJφ为附加转动惯量;Nμ为横摇阻尼力矩系数;D 为排水量;h 为恒温性高;Mf为负载力矩。
为了仿真方便,本文引入的某类型船舶实体参数如表1 所示。

表1 船舶实体参数Tab.1 Physical parameters of ship
1.2 模型仿真
根据式(1)及计算参数[3],在Simulink 中建立横摇运动仿真模型如图1 所示,其中,输入负载力矩信号如图2 所示,最大值为350 t·m2。

图1 横摇仿真模型Fig.1 Rolling model in Simulink
仿真结果如图3 所示,横摇角的变化趋势与载荷力矩变化一致,横摇角最大值大约为7.2°。
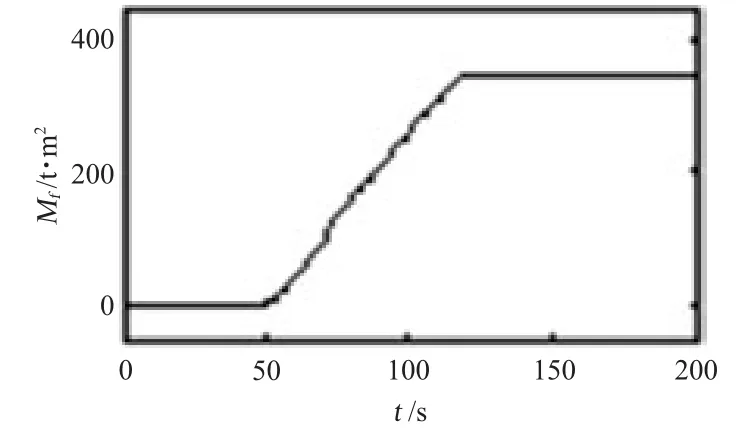
图2 负载力矩Fig.2 Loading moment

图3 横摇角度Fig.3 Rolling angle
而由船的模型式(2)计算可得,当力350 t·m2施加到船体上产生的倾角大小为

理论计算值与仿真结果基本一致,仿真曲线表述了船舶在载荷力矩作用下横摇角的响应过程,验证了所建船体横摇模型的正确性。
2 减摇水舱模型
假设船体两舷各有一液舱(图4 中黑色部分),用A 和B 表示。两液舱间通过泵及管道相连,借助泵的作用,控制系统可在两液舱间进行水的输送。设液舱长为50 m,宽为2 m,高为1 m,初始状态下先给每个液舱各加注50 t 的水,即舱内液位的初始高度是0.5 m。

图4 减摇水舱安装位置Fig.4 Anti-rolling tank installation location
基于静力学的知识,计算加水舱后对船体稳性高度的影响,对船体模型的相关参数进行修改。
结合船舶静力学理论,机构产生的复原力矩为:

式中:Mout为液舱导移机构的输出力矩;h′ 为新的船体稳性高;D′ 为加载液舱后的排水量;Δm 为机构转移的水的质量。
液舱导移机构是一个独立控制子系统,可看成一阶惯性环节,其动态方程用下列数学模型描述:

式中:u 为质量转移命令;Te为时间常数;k 为静态放大系数;Q 为机构中实际转移的液体质量。
3 海浪模型
选择波倾角为描述海浪特性的参数[3],作用在船舶的干扰力矩为M = Dhα,波倾角与海浪有义波高、遭遇角、角频率及船速等有关,其中,有义波高和遭遇角对波倾角的影响最为显著。在仿真中,海况的描述是通过输入海浪谱的相关参数来定的。
以ITTC 标准风浪谱密度公式[4]作为仿真波谱。则海浪谱密度表达式为:

式中:Sζ(ω)为波能;ω 为海浪自然角频率;A 为波谱振幅;B 为波谱常数。
仿真时取有义波高3.8 m,根据海浪理论,其主要能量集中在某一频段,仿真频率段的选择与有义波高和风速有关,选择频率段0.24 ~2.4 rad/s,采用频率等分法,频率增量0.08 rad/s。
海浪实际作用船的频率是遭遇频率ωe,遭遇角ψ 是波浪传播方向与海洋运动体航向间夹角。不同的遭遇角对运动体影响不同,其中遭遇浪向在左、右舷75° ~105°时称为横浪,横浪主要产生横摇。设波长为λ,波速为C,海洋运动体速度为V,则作为干扰输入的风浪谱密度函数应以ωe表示。

根据波能谱等相关理论,采用离散化方法把不同频率的单元波叠加,叠加数n 选择38,余弦初相位φn是概率密度为1/2π、变化范围0 ~2π 之间的平均随机数组,得到遭遇角频率下波高ζe方程为:

海浪有效遭遇波倾角α 简化为

式中KB和KT为船宽和吃水修正系数。取船速20 kn,有义波高3.8 m,波高仿真如图5 所示。不同遭遇角下波倾角的仿真如图6 所示。

图5 波高仿真Fig.5 Simulation of wave height

图6 不同遭遇角下波倾角仿真Fig.6 Wave slope at different encounter angle
4 Kalman 滤波
海浪干扰力矩使得船舶在一定范围内左右摇荡,滤波器可去除海浪对船舶浮态位置的影响,从而确定船舶实际横摇角。假设波倾角产生的力矩是横摇干扰,其在测量中受噪声信号的影响,测量噪声v(t)假设为高斯白噪声,过程噪声w(t)没有测量噪声重要而且很难观测,假定包含在随机波中。
由式(1)横摇运动方程得状态空间方程为:


式中:u(k)为现在状态控制量;P 为估计误差协方差;Q 为过程噪声协方差;X 为状态估算值;I 为单位矩阵;K 为卡尔曼增益。
滤波原理如图7 所示。

图7 Kalman 滤波原理Fig.7 Principle of Kalman filter
图2 所示的输入力矩作为不均布载荷、图6 所示遭遇角90°的海浪同时作用在船舶上,观测滤波前后船舶横摇角度变化如图8 所示。

图8 遭遇角为90°的Kalman 滤波结果Fig.8 Filtered results with wave encounter angle of 90°
改变遭遇角为60°,得到滤波结果如图9 所示。比较图8 和图9 可知,在90°以内随着波倾角的增加,波浪对船舶的影响越大,滤波结果也越差。

图9 遭遇角为 的 滤波结果Fig.9 Filtered results with wave encounter angle of 60°
波高直接影响波倾角和控制性能,调整波高参数可得到不同的滤波效果。保持遭遇角90°不变,改变有义波高,比较图8、图10 和图11,当有义波高为2 m 时,滤波效果很稳定。随着波高增加,海浪对横摇角影响越大,滤波结果越差。

图10 波高为2 m 滤波结果Fig.10 Filtered results with wave height of 2 m

图11 波高为6 m 滤波结果Fig.11 Filtered results with wave height of 6 m
5 减摇水舱控制系统
带减摇水舱的船舶运动控制系统原理如图12 所示,控制器采用传统的PID 控制,执行机构是式(8)所示的惯性环节。

图12 控制系统原理图Fig.12 Structure of control system

图13 船舶浮态位置控制Fig.13 Float state control of the ship
船舶浮态控制系统仿真模型如图13,其中Dynamic ship 单元是包含波浪干扰和Kalman 滤波器的船舶横摇模型。PI 单元中的比例环节和积分环节参数[8]分别为100,80。控制器的输入、输出信号是船舶横摇角和转移液体质量命令。operator 单元是减摇水舱模型,Roll Angle 是系统的横摇角度目标值,用于调整横摇角到特定目标角度,也可以检测系统的性能。对不同负载条件和目标角度下的水舱性能进行仿真。
如图14 所示,在无风静水且不加负载力矩情况下,若船舶初始存在静倾角6°时,调节机构能够较快地使A,B 水舱水量转移,横摇角度减小,使船舶浮态位置回到平衡位置。执行机构工作大约60 s后船体的横倾角已控制在误差范围之内,控制性能较好,响应曲线比较平稳。

图14 初始6°横摇Fig.14 Initial heeling is 6°

图15 负载力矩Fig.15 Loading moment
给系统输入负载力矩如图15 所示,实际船舶在航行过程中,外界条件促使横摇角很难到达0°,此时允许船舶有小的横摇角度,若目标角度设为4°,此时横摇角的变化如图16 所示。减摇水舱A,B 中水位变化如图17 所示。

图16 目标角度下的横摇减摇Fig.16 Heeling damping for target angle

图17 水位变化Fig.17 Water lever change in tanks
6 结 语
1)基于减摇水舱的单自由度船舶横倾运动仿真平台能够模拟船在不均布载荷和海浪干扰下浮态位置变化,通过水舱调整液面,保证船舶竖直浮态。仿真中加入海浪干扰使得仿真效果更接近真实环境。
2)仿真结果与船舶运动理论计算值相比较,验证了模型的正确性。Simulink 仿真结果显示了控制系统的性能以及Kalman 滤波器在船舶浮态控制中的重要性。
3)对船舶姿态的进一步研究应扩展为多自由度仿真平台的设计,其运动模型要向更精确的非线性系统发展,减摇水舱模型应考虑多水舱、不规则水舱,设计更有效的执行机构。
[1]张显库,贾欣乐.船舶运动控制[M].北京:国防工业出版社,2006.
[2]PEREZ T. Ship motion control:course keeping and roll stabilisation using rudder and fins[M].Springer,2005.
[3]邱宏安.随机海浪模型的建立及仿真分析[J]. 系统仿真学报,1999,12 (3):226 -228.QIU Hong-an. Establishment and simulation analysis of random wave model[J]. Journal of System Simulation,1999,12 (3):226 -228.
[4]史震,姚绪梁,于秀萍.运动体控制系统[M].北京:清华大学出版社,2008:25 -40,60 -85.
[5]FOSSEN T I,PEREZ T.Kalman filtering for positioning and heading control of ships and offshore rigs[M]. Control Systems Magazine,2009.
[6]刘胜,张阳.卡尔曼滤波在舰船横摇姿态估计中的应用[M].哈尔滨:哈尔滨工业出版社,1989.
[7]Rudolf Emil Kalman.A new approach to linear filtering and prediction problems,1960.
[8]黄忠霖,黄京. 控制系统MATLAB 计算及仿真[M]. 北京:国防工业出版社,2009.
