Q6儿童假人颈部有限元模型的建立与验证*
2015-12-19曹立波周加冬崔崇桢
曹立波,周加冬,崔崇桢,吴 俊
(湖南大学 汽车车身先进设计制造国家重点实验室,湖南 长沙 410082)
在碰撞事故中,儿童虽然不是事故的主体,但是作为弱势群体,在事故中受到的伤害却是致命的[1].儿童的颈部受到严重损伤的频率虽然不如头部,但是对于儿童假人而言,颈部的重要性却要高于头部[2].碰撞过程中,头部的运动主要受颈部影响,颈部的结构是决定头部运动状态及头部加速度的重要因素,所以假人的颈部结构往往也比较复杂.
目前,仍在广泛使用的儿童假人有P 系列、CRABI系列和HybridⅢ系列.2013年欧洲经济委员会(ECE)开始进行儿童安全法规的更新工作,Q系列儿童假人被提出,并应用到新法规中.国内也在参照欧洲的法规来制定中国的相关儿童保护法规[3].此外,欧洲新车评估组织(Euro NCAP)2013年已经采用Q 系列儿童假人中的Q1.5和Q3[4],Q6假人也即将被采用.Q 系列儿童假人不仅在损伤生物力学特征方面有较大改进,而且它还是第一款可同时用于正面和侧面碰撞测试的多方向假人[5].
目前,LSTC公司只发布了HybridⅢ6岁这一款儿童假人的有限元模型,而较之生物仿真度更高的Q6儿童假人有限元模型还未发布.针对Q6儿童假人颈部有限元模型建模方面的研究还很少.Maurath[6]建立了一个Q3儿童假人有限元模型,进行了假人各部件和整体的验证.卢晋成[2]对HybridⅢ6岁儿童假人的颈部模型进行了验证并指出了其在生物仿真度方面的不足.为了进一步研究保护儿童乘员的措施,本文建立了具有良好细节和较高精度的Q6儿童假人颈部有限元模型,并通过材料参数的敏感性分析和优化,实现仿真曲线和试验曲线的匹配,验证了该模型的有效性.
1 颈部有限元模型的建立
1.1 颈部几何模型的建立
Q6儿童假人颈部主要由颈部铸造体和颈部缆绳总成组成.颈部铸造体由上盖板、颈部橡胶块、3片内嵌板和下盖板组成,其中颈部橡胶块是橡胶材料,3片内嵌板内嵌在颈部橡胶块中;颈部缆绳总成包括压线板、光杆、颈部缆绳、连接螺栓和紧固螺母等,颈部缆绳是人造纤维材料,连接在光杆和连接螺栓孔之间.其余金属部件均是钢铁材料.
颈部橡胶块几何形状较为复杂,采用三维激光扫描仪获取其外表面轮廓信息,最小精度为0.2 mm,再使用Geomagic Studio 12软件对获取的点云数据进行处理;3片内嵌板完全嵌合于颈部橡胶块中,采用CT 扫描获取颈部橡胶块和3片内嵌板的边界轮廓信息,扫描图片的最小精度为512×512像素且每个图片之间的间距为0.5 mm,再分别使用Mimics 10.01 软件和Geomagic Studio 12 软件进行影像数据处理,最后在Catia V5软件中将其和之前处理获得的颈部橡胶块外表面整合获得对应的三维几何模型.Q6儿童假人颈部中的其他零部件都是通过实物的人工测量获得实际尺寸,然后在Catia V5软件中建立三维几何模型.Q6儿童假人颈部三维几何模型如图1所示.

图1 Q6儿童假人颈部三维几何模型Fig.1 3Dgeometric model of Q6child dummy neck
1.2 颈部有限元网格划分
Q6颈部的几何结构尤其是颈部橡胶块的几何结构较为复杂,本文利用HyperMesh 10.0软件对颈部几何模型进行前处理和网格划分,建立了完整的具有详细几何特征和较高精度的Q6颈部有限元模型.该模型包括4 778个节点,15个一维梁单元,192个壳单元,74 个四面体单元,523 个五面体单元,3 720个六面体单元,平均单元尺寸为3mm.该Q6儿童假人颈部有限元模型如图2所示.

图2 Q6儿童假人颈部有限元模型Fig.2 FE model of Q6child dummy neck
在该模型中,根据颈部缆绳的材料特性和分布形状,将其处理成一共线的多段梁单元,该共线的多段梁单元的最上和最下端点分别和上下盖板进行点刚性连接.在颈部橡胶块中间的通孔中生成一层壳单元,在梁单元的共线方向上,各个梁单元和其对应的壳网格的各个节点刚性约束,该层壳网格和通孔间保留了与缆绳和通孔间一致的间隙.在实际假人颈部中,上下盖板和颈部橡胶块的各自接触面间是粘合在一起的,在该有限元模型中采用共节点的连接方式模拟.3片内嵌板完全嵌入颈部橡胶块中且颈部橡胶块贯通各个内嵌板上的通孔,内嵌板采用一层体网格模拟并和颈部橡胶块完全共节点.
为了确保模型计算过程中颈部橡胶块等部件的应力应变不会由于网格质量差而导致较大偏差,在模型网格划分时对3D 单元质量进行了控制,其最小单元尺寸为1.22 mm,时间步长为2.472×10-7s,具体控制参数见表1.

表1 模型网格划分的3D单元质量控制Tab.1 Quality control for 3Dmesh generation
1.3 颈部有限元模型材料参数
颈部结构中比较重要的材料参数是颈部橡胶块和颈部缆绳的材料参数.根据颈部标定试验以及颈部模型在碰撞大位移非均匀变形过程中材料模型的稳定性[6],并参考LSTC 公司发布的各个假人模型的颈部模型材料,通过后续颈部标定试验和仿真标定试验的对比,发现Hybrid Ⅲ6 岁儿童假人颈部橡胶块模型材料,即LS-DYNA 软件中的62 号MAT_VICOUS_FOAM 粘性泡沫材料,较为符合标定试验曲线.该材料模型为非线性弹性刚度和粘性阻尼并联结构[7],其原理如图3所示.

图3 62号材料模型原理图Fig.3 Schematic for material model 62#
图3 中,粘度阻尼系数V2代表能量吸收的能力,非线性弹性刚度E1用来在粘性阻尼吸收能量时限制总的压溃,刚度E2防止时间步长问题.E1和V2在压溃过程中都是非线性的,具体如下式所示.

式中:V为由当前体积相对于初始体积比率决定的相对体积;n1为E1幂定律公式的指数;n2为V2幂定律公式的指数.
参照Hybrid Ⅲ6岁儿童假人颈部有限元模型的材料参数,初步设定的颈部橡胶块材料参数如表2所示,其中ν为泊松比.

表2 颈部橡胶块材料参数Tab.2 Material parameters for neck block rubber
此外,颈部缆绳总成包含高屈服强度、低延展特性的人造纤维绳,作为颈部橡胶块材料失效时的一种保护措施[8].在本模型中,颈部缆绳梁单元采用1号MAT_ELASTIC弹性材料.参照Hybrid Ⅲ6岁儿童假人模型,初步设定弹性模量E=10 000MPa,泊松比ν1=0.3,梁单元采用圆形截面形状.其中和梁单元刚性相连的壳网格采用9 号MAT_NULL材料,在该层壳网格和颈部橡胶块以及3片内嵌板之间添加CONTACT_AUTOMATIC_SURFACE_TO_SURFACE接触关键字,用于模拟缆绳梁单元在受力变形时和通孔壁的接触情况.
颈部其余金属部件在假人运动过程中受力变形较小,可以忽略,且考虑到整体假人仿真的运算效率,在本模型中其均采用20号MAT_RIGID 刚性材料.
2 颈部有限元模型的初步验证
2.1 颈部标定试验
颈部的标定试验在Q6儿童假人使用手册[8]中有具体说明,即:使用一个接口板将颈部总成倒置安装在摆臂上,使用一个头部替代物给颈部总成施加载荷.该头部替代物如图4和图5所示.
一个颈部力矩传感器安装在颈部和头部替代物之间,用于测试颈部该位置所受的力矩.2个旋转电位器用于测量头部替代物相对于摆臂的旋转角度.对旋转电位器数据和力矩传感器数据采用CFC600滤波.安装一个配重块在头部替代物的另一边来保证颈部所受载荷对称.摆臂加速度计位于摆臂上距摆臂轴1 657.4mm 处,测量摆臂的加速度.
颈部和头部替代物的组合可以用于正向和侧向标定试验.正向标定试验和侧向标定试验相互转换时角度传感器和其配重块等须重新进行定位.
在正向标定试验中,将摆臂提升到试验预定高度,释放摆臂,使用标称长度为152.4mm 的蜂窝铝来缓冲摆臂.其标定要求如下.
1)碰撞速度须为3.8~4.0m/s.
2)由摆臂加速度积分求得摆臂速度,摆臂速度减小情况如表3所示.
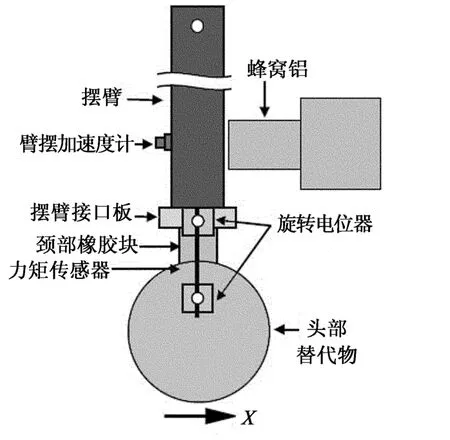
图4 Q6儿童假人颈部正向标定试验示意图Fig.4 Frontal calibration test for Q6child dummy neck

图5 Q6儿童假人颈部侧向标定试验示意图Fig.5 Lateral calibration test for Q6child dummy neck
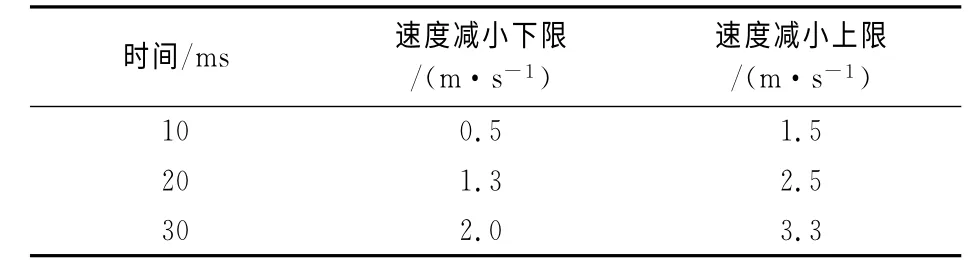
表3 摆臂速度减小情况Tab.3 Pendulum velocity decrease
3)最大头部角度(第1 次波峰)应为36.9°~45.8°,力矩峰值应为22.6~28.0N·m.
侧向标定试验和正向标定试验的步骤基本相同,其标定要求第1,第2条和正向标定试验相同,第3条为:最大头部角度(第1次波峰)应为41.6°~51.6°,力矩峰值应为21.6~26.9N·m.
Kant等[9]发布了颈部正向和侧向标定试验关于头部角度和力矩各3条试验曲线,但并未发布相关的摆臂加速度曲线.本文根据以上信息,进行了相应的颈部标定试验仿真.
2.2 颈部标定试验仿真
Q6假人颈部标定试验中所用到的头部替代物和Q3假人的相同,根据已发布的Q3假人图纸[10],建立了头部替代物的三维几何模型,并在此基础上建立了头部替代物的有限元模型.头部替代物的零件均为铝制或钢制,零件间使用螺栓连接,在有限元模型中,零件均使用20号MAT_RIGID 刚性材料,各个零件间采用刚性连接模拟.头部替代物有限元模型如图6所示.

图6 头部替代物有限元模型Fig.6 FE model of head form
将颈部和头部替代物有限元模型通过力矩传感器的有限元模型连接,用于测量标定试验中规定的力矩.颈部的下端依次连接颈部-胸部接口板、颈部-头部替代物接口板和摆臂接口板有限元模型.在正向标定试验中,在摆臂接口板的安装侧和头部替代物平圆板的同一侧分别安装旋转电位器有限元模型,在平圆板的旋转电位器上设置一个相对于接口板旋转电位器同一位置点的角位移观测点,用于测量标定试验中规定的角度.在平圆板的另一侧安装旋转电位器的配重块有限元模型,得到的正向颈部-头部替代物有限元模型如图7(a)所示.调整颈部和头部替代物的相对位置并重新定位旋转电位器和其配重块,得到的侧向颈部-头部替代物有限元模型如图7(b)所示.
在LS-DYNA 中如将上述颈部标定试验完全进行模拟,仿真模型相对复杂,运算时间较长,同时还需要定义蜂窝铝的相应特性,所以本次验证对仿真模型进行了相应的简化.简化模型中省略了摆臂台架和蜂窝铝,建立一根模拟摆臂轴至摆臂加速度计处摆臂长度的刚性梁单元,梁单元的上端点固定并只剩下除Y方向的转动自由度,下端点与摆臂接口板固定连接在一起.由于没有相关的摆臂加速度信息,在刚性梁的下端点即摆臂加速度测量点定义了一个较大的质量单元,对该质量单元定义标定要求中的碰撞速度和摆臂速度减小情况.为获得摆臂测量点速度的平均情况,正向和侧向标定试验的碰撞速度均选取试验要求速度区间的中间值3.9m/s,摆臂速度减小值也取中间值,得到正向和侧向标定试验的摆臂测量点速度如表4所示.

图7 颈部-头部替代物有限元模型Fig.7 FE model of neck-head form system

表4 正向和侧向标定试验摆臂测量点速度Tab.4 Measuring point’s velocity of frontal and lateral simulation calibration tests
由于该质量单元的质量远大于模型中其他部件的质量,所以该点的实际加速度与由所定义速度进行微分获得的加速度基本一致.对颈部-头部替代物模型施加1g的重力加速度场,单元积分方式选取单点积分,沙漏控制采用LS-DYNA 标准控制方式,时间步长系数为0.6,计算结果中头部角度和力矩的输出频率为10kHz.颈部正向标定试验仿真模型如图8(a)所示,颈部侧向标定试验仿真模型如图8(b)所示.
经过CFC600滤波后的颈部正向标定试验的头部角度和力矩的试验曲线与仿真曲线的对比分别如图9和图10所示.
同理得到颈部侧向标定试验的头部角度和力矩的试验曲线与仿真曲线的对比,分别如图11 和图12所示.

图8 颈部标定试验仿真模型Fig.8 Simulation models of neck calibration tests
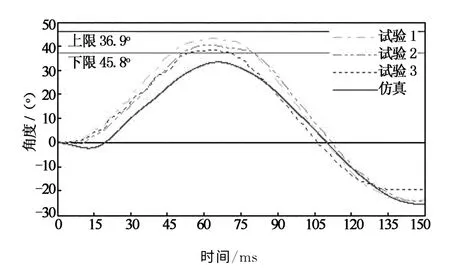
图9 颈部正向标定头部角度试验曲线和仿真曲线对比Fig.9 Head angle curves comparison between simlulation and neck frontal calibration test
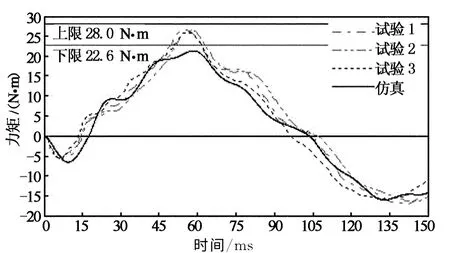
图10 颈部正向标定力矩试验曲线和仿真曲线对比Fig.10 Moment curves comparison between simulation and neck frontal calibration test
颈部正向和侧向标定试验曲线与仿真曲线的对比分析分别见表5和表6.
从图9-图12可以看出,本文所建立的Q6假人颈部有限元模型在正向和侧向标定试验与仿真中的头部角度和力矩曲线的形状和走势基本一致.由表5和表6可知,在两组试验中,最大头部角度分别相差17.8%和15.3%,相差均较大且都小于标定试验要求的下限,出现时刻分别相差5.4%和5.8%,相差均较不明显;力矩峰值分别相差19.1%和12.5%,相差均较大且正向标定试验仿真模型的力矩峰值小于标定试验要求的下限,出现时刻分别相差3.9%和0.95%,相差均为不明显.说明HybridⅢ6岁儿童假人的颈部材料模型运用到Q6儿童假人颈部上是可行的,其材料参数还需要进一步优化,使其与试验一致.
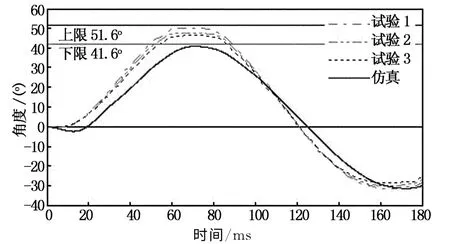
图11 颈部侧向标定头部角度试验曲线和仿真曲线对比Fig.11 Head angle curves comparison between simulation and neck lateral calibration test
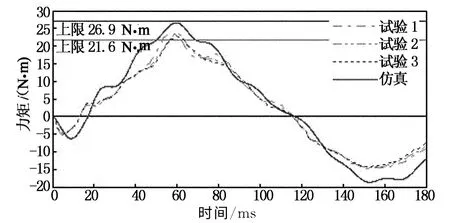
图12 颈部侧向标定力矩试验曲线和仿真曲线对比Fig.12 Moment curves comparison between simulation and neck lateral calibration test
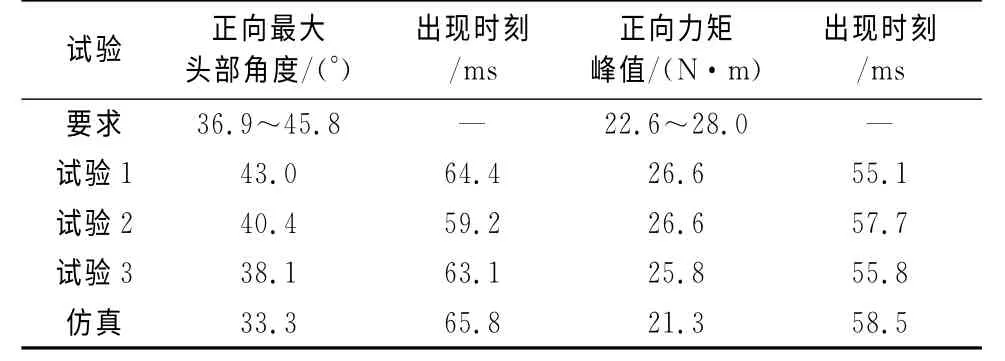
表5 颈部正向标定试验曲线与仿真曲线对比分析Tab.5 Constrastive analysis for neck frontal calibration test curves and simulation curve

表6 颈部侧向标定试验曲线与仿真曲线对比分析Tab.6 Constrastive analysis for neck lateral calibration test curves and simulation curve
3 颈部有限元模型材料参数的优化
整个颈部有限元模型材料参数的优化过程分为2步,第1步为参数敏感性分析,第2步为其后续的优化过程.所有步骤都在LS-OPT 5.0软件中进行.
3.1 参数敏感性分析
在Q6儿童假人颈部标定试验中,影响颈部性能的主要因素是颈部橡胶块和颈部缆绳的材料模型参数.泊松比的取值与材料类型有关且变化范围不大,因此,不考虑改变上述2种材料模型的泊松比.
对其余6种材料参数采用全局敏感性分析,这6种材料参数分别为弹性刚度E1,幂指数n1,粘度阻尼系数V2,弹性刚度E2,幂指数n2,弹性模量E.全局敏感性分析广泛应用于研究高阶模型不同变量的重要性[11],该方法采用百分数来分别表示6种材料参数变量的全局敏感性,每个数值代表对应的变量对于各自响应(总的敏感性指数)变化的贡献率.6种材料参数变量的全局敏感性数值如表7所示.

表7 材料参数变量的全局敏感性数值Tab.7 Global sensitivity values of material parameter variables %
由表7可看出,上述6个参数中,n1和E对4个标定试验仿真模型结果的重要性均较小.因此选择其余4种材料参数作为设计变量进行下一步的优化计算.
3.2 材料参数优化过程
本文采用基于区间缩减序列的响应面法的优化方法对颈部正向和侧向标定试验中的头部角度和力矩曲线进行多目标曲线匹配计算.采用基于面积的曲线匹配法,该方法较一般的基于纵坐标的曲线匹配法在大斜率曲线部分具有较好的计算稳定性[11].运用NSGA-II算法,这种带精英策略的算法优势明显,是目前被公认的最有效的多目标优化算法之一[12].图13为Q6 儿童假人颈部材料参数多目标优化的基本流程.
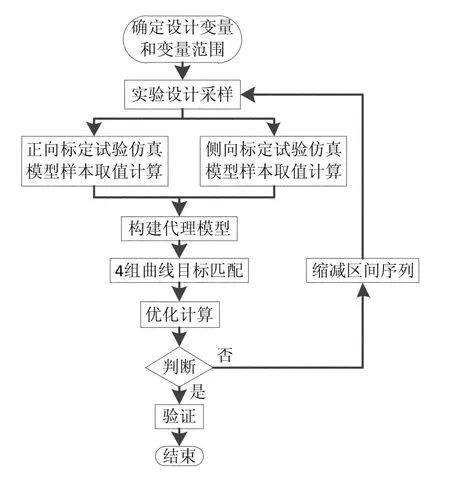
图13 基于区间缩减序列代理模型的优化方法基本流程Fig.13 Basic procedure of sequential metamodel-based optimization with domain reduction
多目标优化研究过程的具体步骤如下:
1)在试验设计中,选择4个设计变量,设定颈部各个材料参数变量的初始值和变化范围.
2)利用D 最优(D-Optimal)采样法对变量进行采样,共采样23组.
3)对颈部正向和侧向标定试验这2种试验工况仿真模型分别调用DYNA 求解器计算优化变量样本,生成对应的头部角度和力矩曲线.
4)构建优化目标的二次多项式的代理模型.
5)计算得到正向和侧向标定试验对应的头部角度和力矩计算结果曲线,和其对应的试验目标曲线构建4组基于面积曲线匹配法的曲线匹配.
6)采用NSGA-II算法对步骤4)构建的代理模型进行多目标优化计算.
7)优化最终达到响应精确度公差0.1或设置的最大迭代次数26而结束;若未达到条件,则相应缩减变量的区间序列,使其区间收敛,返回步骤2)再次循环计算.
8)得到优化结果,对优化结果进行验证,整个过程结束.
试验目标曲线采用3条试验曲线的均值曲线.经过全部26次迭代,优化逐渐收敛得到优化结果.此时优 化 参 数 变 量 的 值 为E1=3.82 MPa,V2=0.96MPa·s,E2=11.97 MPa,n2=1.08.优化后的颈部模型在正向和侧向标定试验中的头部角度和力矩仿真曲线与各自试验曲线的对比分别见图14-图17.

图14 优化后正向标定头部角度试验曲线和仿真曲线对比Fig.14 Head angle curves comparison between neck frontal calibration test and optimized simulation
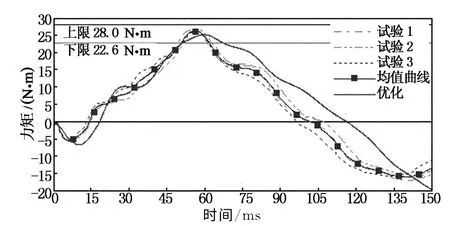
图15 优化后正向标定力矩试验曲线和仿真曲线对比Fig.15 Moment curves comparison between neck frontal calibration test and optimized simulation
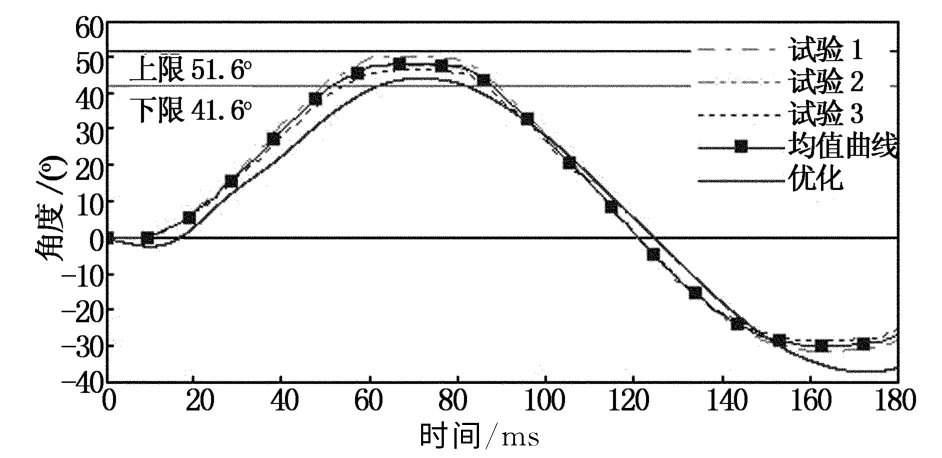
图16 优化后侧向标定头部角度试验曲线和仿真曲线对比Fig.16 Head angle curves comparison between neck lateral calibration test and optimized simulation

图17 优化后侧向标定力矩试验曲线和仿真曲线对比Fig.17 Moment curves comparison between neck lateral calibration test and optimized simulation
优化后正向标定和侧向标定头部角度和力矩都满足标定要求.正向头部角度峰值为42.0°,较试验曲线峰值偏差3.6%,较优化前减少了19.0%;正向力矩峰值为25.1N·m,较试验曲线峰值偏差4.6%,较优化前减少了15.3%.侧向标定头部角度峰值为43.9°,较试验曲线峰值偏差8.5%,较优化前减少了10.3%;侧向标定力矩峰值为25.1N·m,较试验曲线峰值偏差7.6%,较优化前减少了8.4%.优化后的仿真曲线峰值与各自试验曲线峰值的相对偏差均较小,且峰值时刻的相对偏差得到改善.
4 结 论
本文运用三维激光扫描和CT 等逆向工程方法得到Q6儿童假人颈部三维几何模型,并以此建立了一个具有较好的细节表现和较高精度的Q6儿童假人颈部有限元模型.
对颈部材料参数进行正向和侧向标定试验仿真模型的多目标优化,经数次迭代得到优化结果.优化后的模型有效地降低了峰值偏差,改善了峰值时刻和峰值脉宽的偏差.本文建立的Q6儿童假人颈部有限元模型满足Q6儿童假人颈部标定要求,可广泛应用于汽车碰撞仿真研究,其建模和验证的方法可以作为一种参考,应用于后续的假人有限元模型的研究与开发.
[1]白中浩,颜强,龙瑶,等.基于独立碰撞工况的儿童约束系统参数优化[J].湖南大学学报:自然科学版,2012,39(11):46-51.
BAI Zhong-hao,YAN Qiang,LONG Yao,etal.Optimization of child restraint system parameters based on independent crash cases[J].Journal of Hunan University:Natural Sciences,2012,39(11):46-51.(In Chinese)
[2]卢晋成.六岁儿童碰撞假人有限元模型的开发及验证[D].长沙:湖南大学机械与运载工程学院,2013.
LU Jin-cheng.The development and validation of six year old child crash dummy FE model[D].Changsha:College of Mechanical and Vehicles Engineering,Hunan University,2013.(In Chinese)
[3]张金换,李志刚,胡敬文,等.汽车儿童安全保护的欧美法规对比及未来研究方向[J].汽车安全与节能学报,2011,2(3):185-191.
ZHANG Jin-huan,LI Zhi-gang,HU Jing-wen,etal.Child passenger safety regulation comparison between Europe and United States and the developing trends[J].Journal of Automotive Safety and Energy,2011,2(3):185-191.(In Chinese)
[4]ERUO NCAP.Assessment protocol-child occupant protection[S].Europe:European New Car Assessment Programme,2013.
[5]VAN RATINGEN M R,TWISK D,SCHROOTEN M,etal.Biomechanically based design and performance targets for a 3-year old child crash dummy for frontal and side impact[C]//SAE Technical Paper 973316.Child Occupant Protection 2nd Symposium Proceedings.Orlando,Florida,USA:SAE Publication,1997:316.
[6]MAURATH C A.Development and validation of a finite element model of the Q3anthropomorphic testing device[D].Washington,DC:School of Engineering and Applied Science,George Washington University,2008.
[7]LSTC.LS-DYNA keyword user’s manual:volume 1[S].Livermore,California:Livermore Software Technology Corporation,2007.
[8]First Technology.Q6(advanced 6year old child)user manual[S].Plymouth,USA:First Technology Safety Systems,Inc,2008.
[9]KANT R,JILIE F.Q6Child dummy and FLEX PLI GTR leg model development[R].Bonn:Humanetics Europe Gmbh,Altair Development France,2011.
[10]Dummy Testing Eqwpment Subcommittee.Drawing package for Q3dummy[S].Geneva:Humanetics,2012.
[11]LSTC.LS-OPT user’s manual-a design optimization and probabilistic analysis tool for the engineering analyst[S].Livermore,California:Livermore Software Technology Corporation,2012.
[12]杨济匡,杨杏梅,张超尘.轿车侧碰撞中儿童乘员约束系统的多目标优化[J].机械工程学报,2011,47(12):79-84.
YANG Ji-kuang,YANG Xing-mei,ZHANG Chao-chen.Multi-objective optimization of child restraint system for vehicle side impact[J].Jouranl of Mechnical Engineering,2011,47(12):79-84.(In Chinese)
