频域磁声耦合成像实验系统研究
2015-12-19张顺起周晓青刘志朋
张顺起,周晓青,殷 涛,刘志朋
频域磁声耦合成像实验系统研究
张顺起,周晓青,殷涛,刘志朋
目的:研究设计频域磁声耦合成像系统,以实现组织样本的电导率成像。方法:采用连续波正弦信号激励产生磁声信号,利用锁相放大器进行磁声信号的频域幅值和相位的检测,设计基于虚拟仪器的磁声成像实验系统控制程序,进行金属模型的磁声信号实验验证。结果:设计的频域磁声成像实验系统信号幅值检测精度明显提高,达到10-7Pa,实现了磁声信号声源的空间定位,定位精度达到mm级。结论:设计的频域磁声耦合成像系统实现了低频激励下高分辨率声源定位,对于磁声耦合声源理论的研究以及提高磁声成像的精度具有重要意义。
磁声耦合成像;频域;实验系统;锁相放大
0 引言
生物组织电特性反映了生物组织生理和病理状态[1-2],通过对其进行检测和成像[3-4]有助于相关疾病的早期诊断。磁声成像技术是一种新型的生物组织电特性成像技术[5-6],它通过交变电流激励施加于生物组织,产生振动并形成声波[7],接收到该声压信号后即可获得待测组织的电导率信息[8],实现生物组织电特性的检测和成像。磁声耦合无损功能成像方法同时具有电阻抗成像高对比度[9]及超声成像高空间分辨率[10]的特点,对肿瘤等疾病的早期诊断具有重要的研究价值。
目前,磁声耦合成像正处于实验室研究阶段,国内外有多篇文献对此方法进行报道[11-17]。目前报道主要采用基于短脉冲的激励与检测模式,使用10 kV级高压μs短脉发生器产生激励[12-13],该激励源涉及高速高压开关控制技术,实现具有难度。该方法信号相对直观,重建算法相对简单,但是由于信号噪声比有限,检测精度低,限制了成像质量。另有文献报道采用锁相放大方法检测磁声耦合生物电流[6],可提高检测精度,但仅获得了单一频率的幅值,尚无法获得声源空间位置信息,进而实现成像。
本研究提出并设计了新型频域磁声耦合成像系统,通过低频连续波进行磁声信号激励,采用锁相放大实现微弱声信号幅值、相位的检测。研究中进行了基于虚拟仪器的频域磁声成像系统控制程序设计,并对连续波频域磁声成像方法进行实验验证。本文设计的频域磁声耦合成像实验系统对后续研究验证磁声耦合声源理论以及提高磁声成像精度具有重要意义。
1 理论方法
1.1频域磁声耦合成像方法的数学模型
频域内的磁声耦合波动方程[12]为

其中,P(r,jω)为频域磁声耦合声信号;F为介质质点受到的洛伦兹力密度;若设电流密度为J,静磁场为B0,则F=J×B0;S(jω)为激励函数频谱;H(jω)为磁声成像系统函数的傅里叶变换,为角频率;c为介质中的声速。利用格林函数,根据分离变量法[11],求解得到频域磁声耦合声信号表达式:
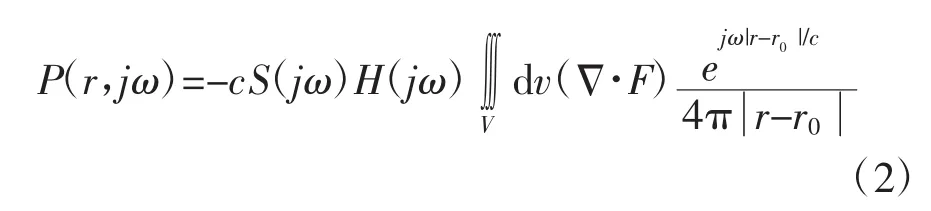
其中,F=J×B0,▽·F为介质声源项,根据本构关系欧姆定律J=σE,可见,声源项包含了介质电导率信息。ejω|r-r0|/c反映了介质各质点到检测器距离形成的频域相位延迟。为声波在距离上的传输系数,将反映在频域的幅Δ值信息中。由此可见,频域磁声信号即为介质声源▽·F与延迟在检测点r0处的空间积分。
1.2基于连续波的磁声信号锁相放大检测方法
本研究采用锁相放大方法实现对频域磁声信号幅值和相位的检测,锁相放大框图如图1所示[18-19]。
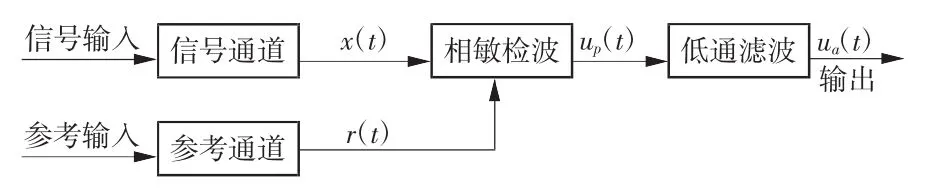
图1 锁相放大框图
设待测磁声耦合信号为正弦激励,则

其中,AMP为幅值;PHA为相位。当锁相放大器参考信号频率与待测磁声信号频率相同时,即

经过模拟乘法器后,

由于f(r,t)中包含了成像系统函数h(t),该参数反映了成像系统中包括声传感器、放大器等元器件的频率特性,可视为滤波器。代入sin(ω1t)激励频谱,可得:
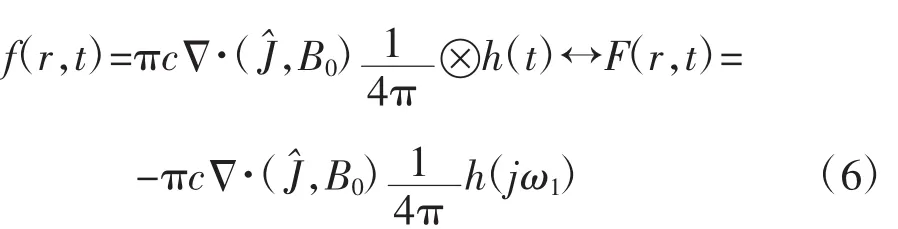
当成像系统确定时,系统函数h(jω1)确定,将其作为常数进行计算,因此得到:

经过内部低通滤波后得到:

再经过相敏检波得到包含介质电导率信息及其空间分布的幅值和相位,实现对与磁声耦合成像微弱声信号对应频率的分量幅值和相位的检测。
2 实验系统设计
为了实现频域磁声成像的信号激励以及基于锁相放大方法的信号检测,本研究设计建立了频域磁声耦合成像实验系统,编制了实验系统控制程序。
2.1磁声成像系统的主要结构
频域磁声信号实验检测系统的主要结构如图2所示,主要由信号发生激励模块、扫描驱动模块和信号检测处理模块组成。
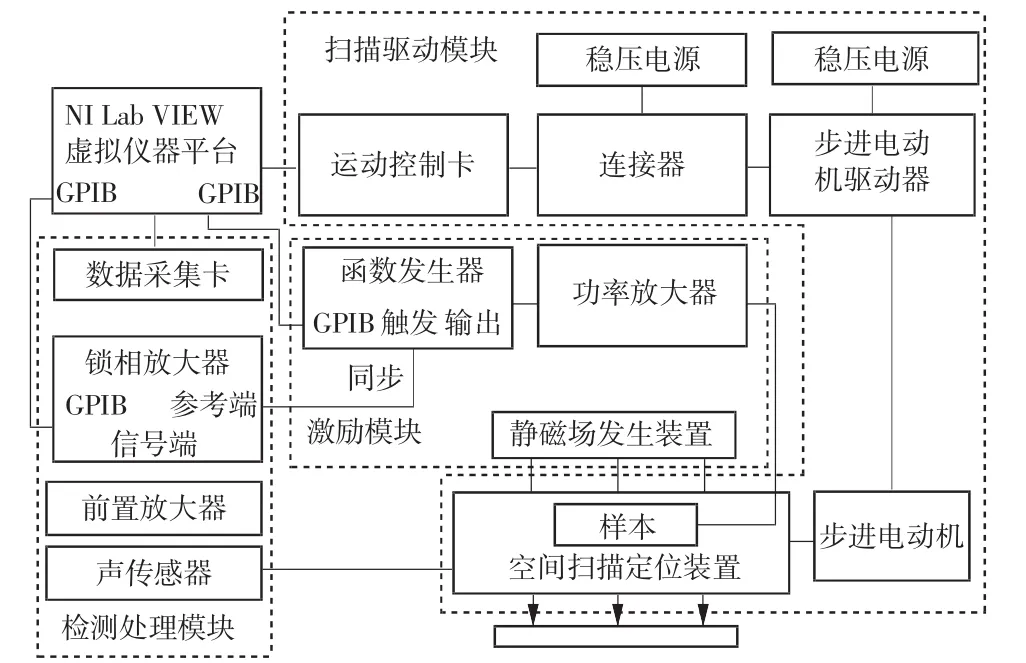
图2 频域磁声成像实验检测系统主要结构图
信号发生激励模块主要由函数发生器、功率放大器以及静磁场发生装置组成。其主要功能为对实验样本模型施加电流激励和静磁场,生成磁声耦合声信号。
扫描驱动模块由运动控制卡及其配套连接器、步进电动机及驱动器以及磁声成像空间扫描定位装置组成。主要实现传感器的运动定位和驱动以及空间位置的定位检测。
信号检测处理模块由声传感器及其前置放大器、锁相放大器及数据采集卡等组成。主要实现频域磁声信号的检测和采集处理。
2.2系统工作流程
系统工作时,由NI Lab VIEW虚拟仪器平台通过GPIB接口对实验系统各模块进行控制。通过虚拟仪器面板实现函数发生器输出参数、激励波形的设置和输出控制。由功率放大器进行功率输出,激励静磁场中的样本,静磁场在磁极中心半径5cm、高10cm的圆柱形空间内均匀分布,磁感应强度0.3 T。函数发生器同时输出同步时钟信号,提供锁相放大参考。同时,虚拟仪器平台通过运动控制卡(PXI7340)进行运动控制,输出控制代码,经由连接器输入到步进电动机驱动器进行编码,驱动步进电动机进行角度步进。步进电动机(NEMA23)最小步进角为1.8°。由空间扫描定位装置驱动传感器进行定位检测,空间扫描定位装置可实现5轴驱动,即x、y、z轴平移以及传感器和样本的转动,x轴丝杠齿距为3 mm,y轴丝杠齿距为4 mm,z轴丝杠齿距为3 mm。声传感器进行由声信号到电信号的转换检测,其采用预极化传声器(MP201),频率响应在6.3 Hz~20 kHz,开路灵敏度为50 mV/Pa。经过前置放大后,由锁相放大器根据函数发生器的同步参考信号进行对应频率的检测,锁相放大器(LI5640)最小检测电压精度为nV,相位精度为0.01°。最后由信号采集卡(PXI5922)进行采集处理和存储。
2.3基于虚拟仪器的系统控制程序设计
为了实现频域磁声检测实验系统的仪器驱动、运动控制和信号采集,本研究基于虚拟仪器平台进行了频域成像系统控制程序设计,实现了信号的激励与锁相放大检测、信号采集与运动控制。程序框图如图3所示。
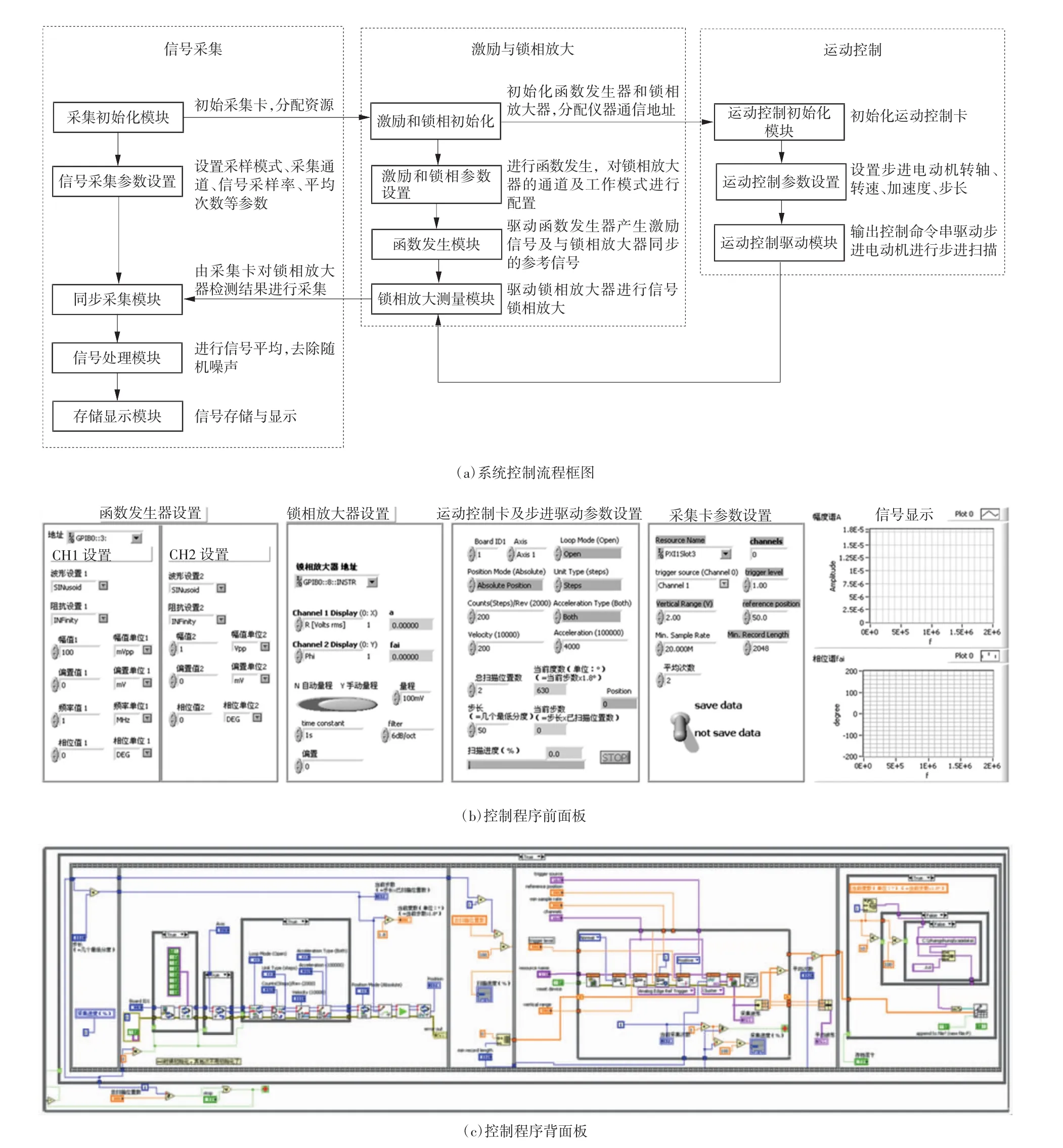
图3 频域磁声成像系统Lab VIEW虚拟仪器平台控制程序
3 结果
为了验证和测试本研究设计的频域磁声耦合成像系统对磁声信号幅值的检测精度及相位对声源的定位精度,本研究利用频域磁声耦合成像系统对金属丝样本进行了实验研究。
3.1声信号检测实验研究
3.1.1不同激励磁声信号的检测实验
实验采用单根直导线作为声源,通过设置不同的激励研究频域磁声耦合成像系统对磁声信号幅值的检测精度以及相位与声源位置的对应关系。实验装置与图2一致。
设置静磁场0.4 T,激励频率10 kHz,检测距离0.1m。设置不同量级的电流激励,强度由0.1mA~1A,锁相放大检测频域磁声信号幅值和相位,信号经过512次平均。幅值和相位检测结果如图4所示。
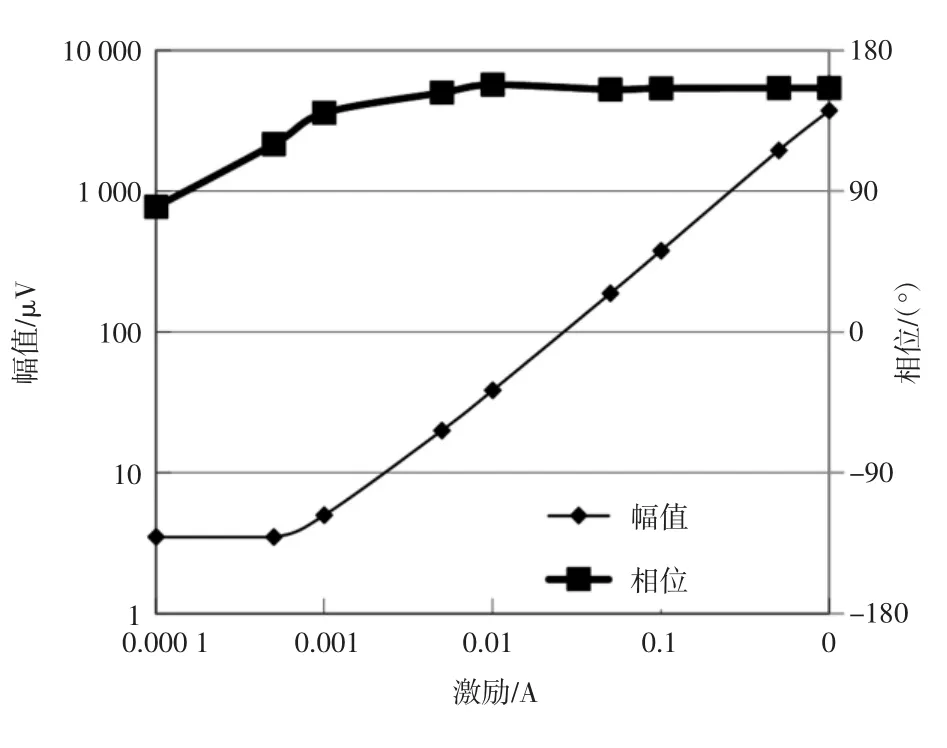
图4 不同激励下的直导线声源的磁声信号锁相放大幅值和相位测量结果
由不同激励下磁声信号的幅值、相位实验结果可见,在激励电流大于1 mA情况下,幅值与激励呈现线性关系,即在大于此激励水平下,可测得对应激励的磁声信号。由于检测器与声源相对位置不变,因此可见相位曲线在该范围内为恒定值。同时注意到,当激励小于1 mA时,磁声信号受到噪声影响,检测存在一定误差,此时检测到的信号为随机噪声。
以上实验结果说明,利用连续波激励方法,对于金属丝模型,当激励信号达到mA级即可检测到磁声信号,计算可知精度明显提高,达到10-7Pa量级。
3.1.2不同空间位置声源的定位特性
基于前述实验,进一步对连续波激励下磁声成像频域的幅值和相位与声源空间位置的对应关系进行实验研究,选择不同检测位置进行频域信号检测,研究频域方法对于声源的空间定位特性。
设激励为1V,静磁场为0.4T,检测距离为0.1m,检测距离由2、5、10、15、20 mm……逐渐增大,描记幅值、相位随距离的变化曲线,信号经过512次平均。幅值检测结果如图5(a)所示,相位检测结果如图5(b)所示。
由不同检测距离下的频域磁声信号实验检测结果可见,随着声源与检测器距离的增加,传播时间延迟t增加,频域相位发生变化,不同相位对应不同距离。一个周期内相位与空间距离呈现线性关系,对于5、10、20 kHz频率,10 mm距离变化对应的频域信号相位变化分别为25、50和100°左右,与理论仿真结果一致。同时由于锁相放大器相位角检测范围在-180~180°之间,可见相位曲线呈周期性变化,其周期与信号周期一致。经过对曲线360°跳变的修正后,相位曲线如图5(c)所示,曲线呈现近似直线变化,证明了声源位置的移动导致相位产生了对应变化,系统可实现基于相位的声源定位。
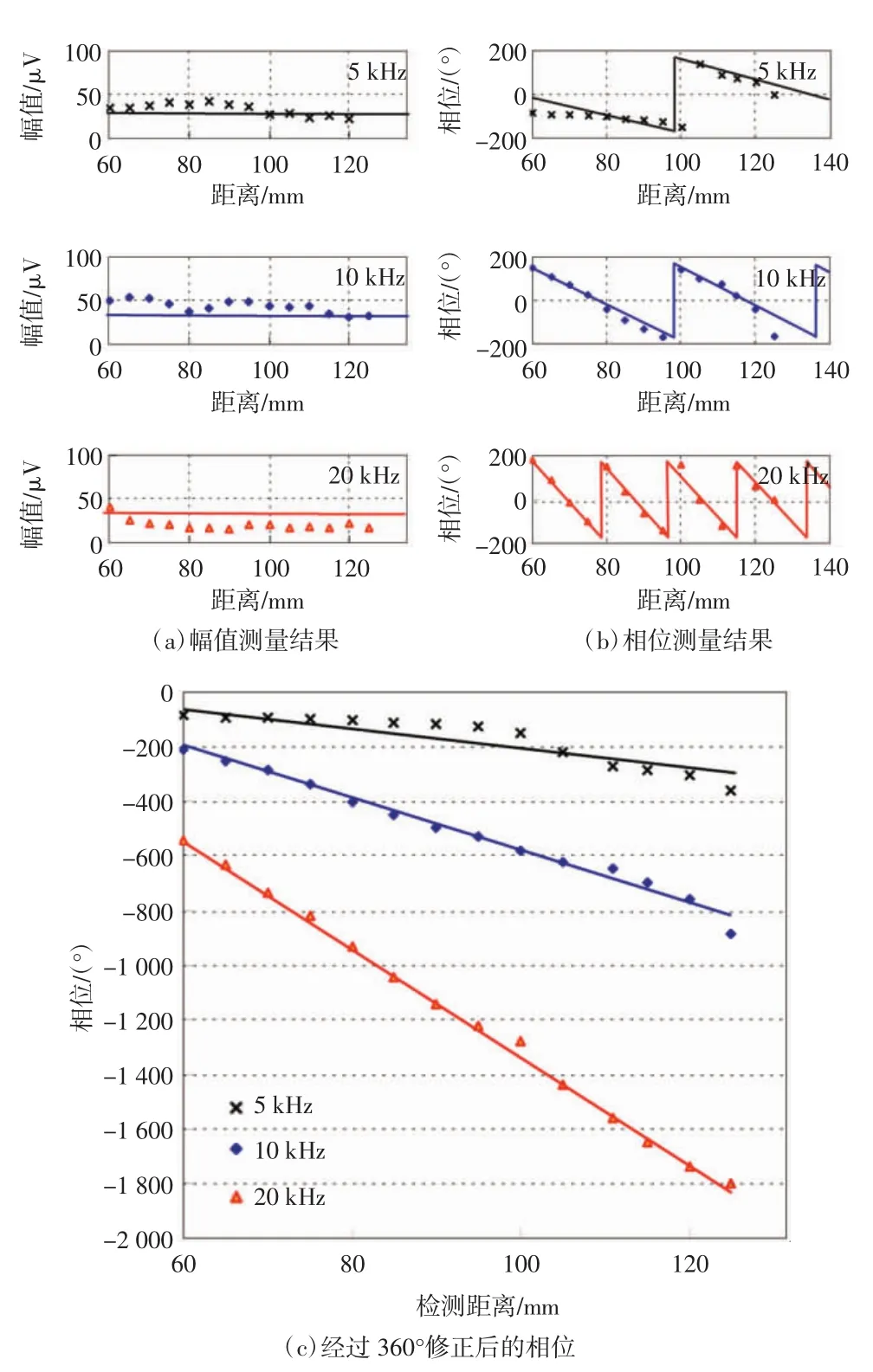
图5 不同距离下直导线声源的磁声信号锁相放大幅值相位测量结果
另外,从实验结果可见,幅值曲线在距离60~80 mm附近与理论计算结果近似相同。同时由于受到环境噪声、测试装置对声波的反射散射以及电路导线噪声等影响,导致相位检测结果与理论值具有一定误差,在60 mm以外位置,经过相位补偿后计算可知,测量的相对误差小于±6%。
3.1.3频域成像系统的空间定位精度分析
由前面实验可见,频域信息尤其是相位反映了声源的空间位置,为了验证频域成像系统对介质声源位置的定位精度,本研究通过频域磁声成像系统驱动步进电动机精密移动,检测不同移动距离下的磁声信号相位改变。
设初始检测距离为0.1 m位置处,消除丝杠运动空回后,通过设置步进电动机带动转轴丝杠运动0.1、1、10 mm,测量信号相位变化,经过512次实验测量统计平均值以及标准差,从而获得频域磁声信号对于空间距离变化的定位性能。实验结果见表1。
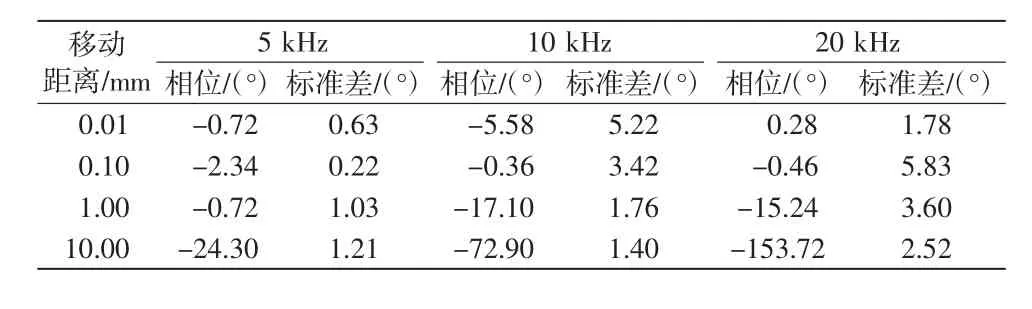
表1 不同移动距离下相位检测精度实验结果
由表1可见,对于0.01和0.1 mm的距离变化,其相位变化的标准差大于信号检测值,无法进行信号相位的检测和估计;对于1 mm以上的距离变化,信号相位检测标准差小于信号测量值。由实验结果可见,本研究设计的频域磁声成像实验系统可实现mm级信号的空间定位。
4 讨论与结语
本文设计了频域磁声耦合成像实验系统,基于连续正弦波进行了磁声信号激励,基于锁相放大进行了磁声信号检测。利用虚拟仪器平台进行了磁声耦合成像系统的驱动控制程序设计,开展了基于连续波方法的磁声成像系统性能测试实验。实验结果表明,频域磁声耦合成像系统可实现10-7Pa的声压检测精度。相比于传统时域检测方法,检测精度明显提高。同时,本研究设计的频域磁声成像系统声源的空间定位精度达到mm级。
总之,本研究设计的频域磁声耦合成像系统,实现了低频kHz激励下的mm分辨率的声源定位,有利于降低磁声耦合激励源设计实现难度,对于提高微弱磁声信号检测精度、进行介质内部声源相关理论的研究以及提高成像精度具有重要意义。
本文仅对频域磁声成像相关的系统和实验研究开展了初步的工作,目前尚存在一定问题,包括:(1)实验样本采用金属丝模型,由于频域方法对于幅值相位测量相对灵敏,对于多根金属边界其各条金属线之间的形状无法实现完全一致,形状的微小差别会导致频域幅值和相位测量数据上存在变化,其检测稳定性有待加强;(2)目前,成像系统对声信号的测量仍会受到噪声影响,噪声的屏蔽性能需要进行改进。需要进一步开展的工作包括:(1)相对复杂模型的研究,如多层电导率模型、基于人体组织器官分布的复杂模型;(2)考虑其他波形激励方式,适当提高成像范围;(3)设计噪声屏蔽装置,减小噪声引起的误差,进一步提高信号检测精度。
[1]Alexander S,Aviram N,Zahava G,et al.Electrical impedance scanning for the early detection of breast cancer in young women:preliminary results of a multicenter prospective clinical trial[J].Journal of Clinical Oncology,2005,23(12):2 703-2 715.
[2]Gabriel S,Lau R W,Gabriel C.The dielectric properties of biological tissues II:measurements on the frequency range 10 Hz to 20 GHz[J]. Phys Med Biol,1996,41(11):2 251-2 269.
[3]杨琳,徐灿华,史学涛,等.一种基于多频电阻抗断层成像系统的校准方法研究[J].医疗卫生装备,2014,35(1):1-5.
[4]Bradley J R,Peter J B.A theoretical model for magneto-acoustic imaging of bioelectric currents[J].IEEE Transactions on Biomedical Engineering,1994,41(8):723-728.
[5]HAN Wen.Volumetric Hall Effect tomography[J].Ultrason Imaging,1999,21:186-200.
[6]Bradley J R.The role of magnetic forces in biology and medicine[J]. Experimental Biology and Medicine,2011,236:132-137.
[7]XIA Rong-min,LI Xu,HE Bin.Reconstruction of vectorial acoustic sources in time-domain tomography[J].IEEE Trans Med Imaging,2009,28(5):669-675.
[8]HU Gang,HE Bin.Magnetoacoustic imaging of magnetic iron oxide nanoparticles embedded in biological tissues with microsecond magnetic stimulation[J].Applied Physics Letters,2012,100:013 704.
[9]徐桂芝.生物医学电阻抗成像技术[M].北京:机械工业出版社,2010:20-32.
[10]万明习.生物医学超声实验[M].西安:西安交通大学出版社,2010: 20-38.
[11]XU Yuan,HE Bin.Magnetoacoustic tomography with magnetic induction(MAT-MI)[J].Institute of Physics Publishing,2005,50: 5 175-5 187.
[12]Leo M,HU Gang,HE Bin.Magnetoacoustic tomography with magnetic induction for high-resolution bioimepedance imaging through vector source reconstruction under the static field of MRI magnet[J]. Medical Physics,2014,41:022 902.
[13]HU Gang,HE Bin.Magnetoacoustic imaging of electrical conductivity of biological tissues at a spatialresolution better than 2 mm[J].Plos One,2011,6(8):e23 421.
[14]WANG Shi-gang,ZHANG Shun-qi,MA Ren,et al.A study of acoustic source generation mechanism of magnetoacoustic tomography[J]. Computerized Medical Imaging and Graphics,2014,38(1):42-48.
[15]Salim M M,Supriyanto E,Haueisen J,et al.Measurement of bioelectric and acoustic profile of breast tissue using hybrid magnetoacoustic method for cancer detection[J].Medical&Biological Engineering& Computing,2013,51(4):459-466.
[16]Emerson J F,Chang D B,Mcnaughton S,et al.Electromagnetic acoustic imaging[J].IEEE Transactions on Ultrasonics,Ferroelectrics and Frequency Control,2013,60(2):364-372.
[17]Grasland M P,Mari J M,Chapelon J Y,et al.Lorentz force electrical impedance tomography[J].IRBM,2013,34(4-5):357-360.
[18]Edwin C C.Electronics via Waveform Analysis[M].US:Springer Verlag,1993:315-317.
[19]高晋占.微弱信号检测[M].北京:清华大学出版社,2004:154-166.
(收稿:2014-10-27修回:2015-02-09)
System study on magneto-acoustic imaging in frequency domain
ZHANG Shun-qi,ZHOU Xiao-qing,YIN Tao,LIU Zhi-peng
(Institute of Biomedical Engineering,Chinese Academy of Medical Sciences&Peking Union Medical College,Tianjin 300192,China)
Objective To design a new frequency domain magnato-aoustic imaging system to image the conductivity of medium.Methods A continuous sine wave signal was adopted to stimulate the MAT signal.The lock-in technique was applied to measuring the amplitude and phase of the magneto-acoustic signal.The drive control program of the imaging system was designed using virtual instrument tools.The experiments were conducted on the phantom made of coper wire. Results The amplitude precision was improved up to 10-7Pa,while the system could locate the sonic source with locating precision of millimeter.Conclusion A new magneto-acoustic imaging system is proposed with high locating precision as well as low frequency excitation,which is significative to the study on the sonic source theory and improvement of the imaging precision.[Chinese Medical Equipment Journal,2015,36(5):1-5]
magneto-acoustic imaging;frequency domain;experiment system;lock-in amplification
[中国图书资料分类号]R318;TH776A
1003-8868(2015)05-0001-05
10.7687/J.ISSN1003-8868.2015.05.001
国家自然科学基金重点项目(51137004);国家自然科学基金面上项目(81171424);天津应用基础与前沿技术青年项目(13JCQNJC14000)
张顺起(1984—),男,博士,助理研究员,主要从事医学电磁成像方面的研究工作,E-mail:zhangshunqi2004@126.com。
300192天津,中国医学科学院北京协和医学院生物医学工程研究所(张顺起,周晓青,殷涛,刘志朋)
刘志朋,E-mail:lzpeng67@163.com