轨道测量仪超高测量分析
2015-12-17邓川
邓川
(中铁第一勘察设计院集团有限公司,陕西西安710043)
轨道测量仪超高测量分析
邓川
(中铁第一勘察设计院集团有限公司,陕西西安710043)
从轨道的超高测量原理出发,对不同轨道测量设备超高测量结果不一致的原因进行研究。轨道测量仪与其他轨道测量设备超高测量结果不一致是由于超高测量面与轨道超高测线“线面不一致”。并对“线面不一致”导致的超高测量误差进行了误差分析和试验验证。基于轨道测量仪的自身结构和超高测量原理,提出了减少“线面不一致”超高测量误差的方法和建议。
轨道测量仪 超高测量 测量基准 误差分析
1 超高测量原理
目前,轨道的静态超高主要是利用轨道测量仪或道尺进行测量。在检测同一段线路的轨道超高时,不同的轨道测量设备的测量结果必须符合示值误差要求,且应相互一致。然而,在实际工作中却发现,不同的轨道测量设备在测量同一段线路的轨道超高时,各测量结果却不尽相同,直接造成对轨道实际超高的误判。因此,有必要分析不同轨道测量设备超高测量结果不一致的具体原因。
超高是指线路左右两股钢轨顶面的相对高差h (如图1所示),则超高计算公式为

式中:θ为钢轨顶面与水平面的夹角,可由轨道测量仪或道尺内置的倾角传感器测出;L为左右钢轨中心的间距,是计算超高的基准长度。
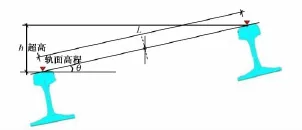
图1 超高测量原理
2 超高测量不一致分析
轨道测量仪与道尺的外形结构如图2、图3所示。轨道测量仪的外形呈“T”形结构,与左右股钢轨的顶面三点接触,测量基准为三点确定的平面。而道尺外形呈“一”字形结构,与左右股钢轨顶面两点接触,测量基准为两点确定的直线。
由于轨道设计存在坡度、曲线、超高等要素,如果未经调整,其各处几何状态各不相同,易使左右股钢轨发生空间扭曲。如图4所示,钢轨扭曲使轨道测量仪与钢轨接触点A,B,C处的轨道状态各不相同,导致其测量基准平面ABC发生倾斜,造成其超高测量轴线OC与轨道超高测线O'C不一致,其超高测量值Δh不能表征此处轨道超高。而道尺呈“一”字形结构,宽度很窄,不受左右股钢轨空间扭曲影响,其超高测量轴线始终与轨道超高测线一致,超高测量值与轨道超高相符。因此,轨道测量仪与其他轨道测量设备超高测量结果不一致的原因是由于其超高测量面与轨道超高测线“线面不一致”。

图2 轨道测量仪示意

图3 道尺示意

图4 轨道状态对超高测量影响的示意
3 超高误差分析
如图4所示,设A,B,C,O'四点的高程分别为HA,HB,HC,HO',以过O'点的水平面为投影基准,将A,B,C三点投影到基准面上,则L1,L2,L3的投影长度L'1,L'2,L'3分别为

以O'点为坐标原点,AB的投影线为X轴,O'C的投影线为Y轴,Z轴垂直于XO'Y平面构成独立坐标系,则O',A,B,C四点在独立坐标系下的三维坐标分别为(0,0,0)、(-L'1,0,HA-HO'),(L'2,0,HB-HO'),(0,L'3,HC-HO')。
由解析几何可知,平面ABC的法向量和直线CO'方向向量分别为

则平面ABC与直线CO'的夹角α的正弦值为

将式(5)代入式(1),即可计算出“线面不一致”造成的超高测量误差。
4 试验验证
将某段未开通运营的客运专线作为试验场地,在其直线段和曲线段各选取10个轨枕进行测量试验。首先,对试验场地的左右股钢轨进行清理,清除附着的铁锈、灰尘、杂质等。然后,采用经检测合格的轨道测量仪推行测量每个钢轨扣件处的超高值,并用记号笔准确标记出其走行轮与钢轨的3个接触点。之后,再利用检测合格的0级道尺测量每个钢轨扣件处的超高值。最后,利用水准测量方式,依次测量出每个标记点处的高程值。
测量数据及对比结果,如表1所示。
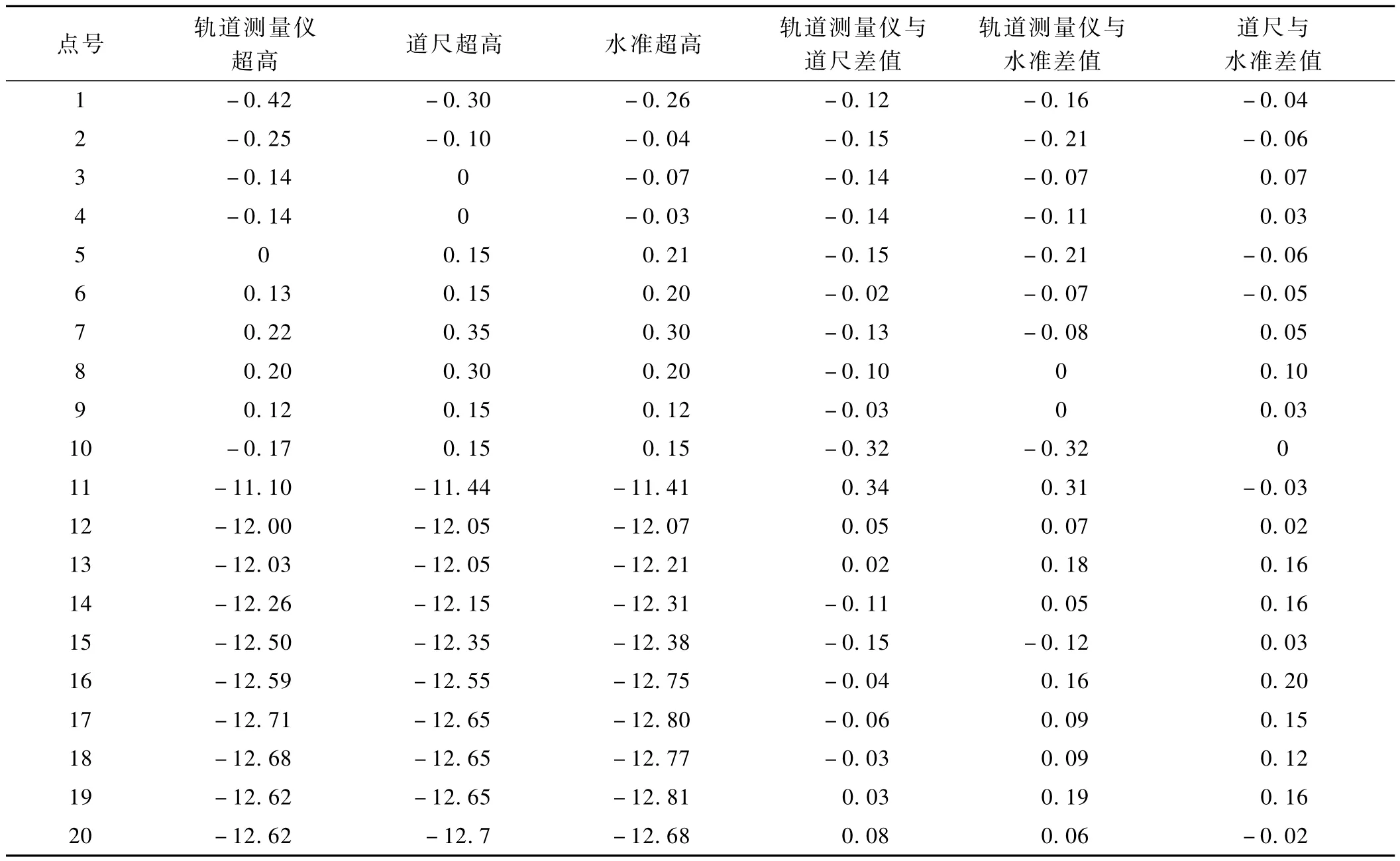
表1 轨道测量仪、道尺和水准测量的超高值及相互差值mm
由表1可知:道尺与水准的超高测量值符合较好,差值最大为0.20 mm;而轨道测量仪与道尺的超高测量值在轨枕10和轨枕11处的差值均>0.30 mm,但道尺与水准的超高测量值却相符合。
由于轨道测量仪与钢轨接触点的高程已通过水准测量得到,且轨道测量仪的结构参数L1,L2,L3已知,则可构成独立坐标系。轨枕10和轨枕11处各接触点在各自独立坐标系下的坐标如表2所示。
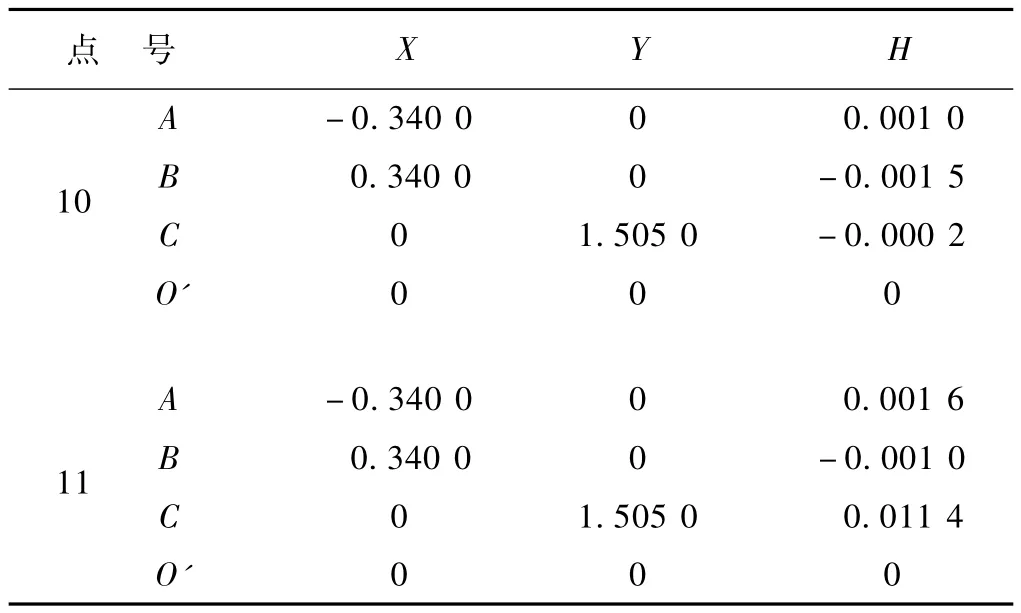
表2 轨枕10和轨枕11处各接触点的坐标m

根据轨道的几何状态,对轨道测量仪的超高测量值进行修正,并与道尺、水准测量的超高值进行比较,如表3所示。

表3 轨道测量仪的修正超高与道尺、水准测量的超高差值mm
由表3可知,经过“线面不一致”超高误差修正后,轨道测量仪与道尺、水准测量在轨枕10和轨枕11处的超高测量值基本一致,最大仅相差-0.07 mm,相互符合。
5 结论
轨道测量仪与其他轨道测量设备超高测量不一致的原因是由于其超高测量面与轨道超高测线“线面不一致”,其影响程度甚至超过超高测量示值误差0.3 mm的要求。因此,为了削弱“线面不一致”对超高测量的影响,可基于轨道测量仪的自身结构和超高测量原理,采用以下几种方法进行控制:
1)轨道测量仪需选用满足超高测量精度要求的倾角传感器。由于倾角传感器的灵敏度有方向性,轨道超高测线应与其横轴平行,因此除考虑其线性精度、温漂、零漂等常规性能特征外,还应考虑其横轴误差。
2)轨道测量作业前,需对所测钢轨表面和轨道测量仪的走行轮表面进行清理,清除附着的铁锈、灰尘、杂质等。
3)由于轨道测量仪的外形呈“T”形结构,其正、反向测量的超高误差符号相反、量值相等,调头超高修正后可有效削弱“线面不一致”影响。
[1]中华人民共和国铁道部.TB 10601—2009高速铁路工程测量规范[S].北京:中国铁道出版社,2009.
[2]中华人民共和国铁道部.TB/T 3147—2012铁路轨道检查仪[S].北京:中国铁道出版社,2012.
[3]中华人民共和国铁道部科学技术司.科技基[2008]86号客运专线轨道几何状态测量仪暂行技术条件[S].北京:中国铁道出版社,2008.
[4]彭春秀.轨道坡度对测量静态超高的影响[J].铁道技术监督,2014,42(3):17-19.
[5]王昆.高铁型轨道检查仪误差控制的关键技术研究[D].江西:南昌大学,2014.
(责任审编赵其文)
U213.2+32
A
10.3969/j.issn.1003-1995.2015.12.33
1003-1995(2015)12-0127-03
2015-06-28;
2015-09-02
邓川(1986—),男,工程师,硕士。
