气动盾形闸门协同纠偏控制系统研究
2015-12-15冯磊华
杨 锋,冯磊华,2
(1.湖南江河机电自动化工程有限公司,湖南长沙410013;2.长沙理工大学能源与动力工程学院,湖南长沙410114)
气动盾形闸门协同纠偏控制系统研究
杨 锋1,冯磊华1,2
(1.湖南江河机电自动化工程有限公司,湖南长沙410013;2.长沙理工大学能源与动力工程学院,湖南长沙410114)
气动盾形闸门是目前水利工程主要的发展趋势之一,在国外已得到较广泛应用,但在我国的使用才刚刚起步。针对该闸门在使用过程中存在闸门开度之间偏差较大、水位控制精度不高的问题,本文设计了一种协同纠偏控制系统。该系统将每组闸门的开度偏差经模糊跟踪控制器校正之后,施加到每组闸门的执行机构中,达到消除偏差的目的。通过仿真及实际应用结果对比分析,协同纠偏控制减小了闸门开度之间的偏差,并对水位调整过程中的超调量和调整时间均有较大改善,提高了水位控制精度,为该闸门在我国的进一步推广打下了坚实的基础。
气动盾形闸门;协同纠偏控制;水位控制;水利工程
引言
气动盾形闸门是综合了传统钢闸门及橡胶坝优点的一种新型闸门,由美国O H I公司研发,可广泛运用到河道治理及城市景观、大坝加高、引水、农田灌溉、防旱排涝、水力发电、海堤建设防海水倒灌等工程。目前,该闸门已经成功应用在美国及加拿大等地渠道与河道上。
我国对气动盾形闸门的使用尚处于起步阶段,且在使用过程中出现了一些较难解决的问题,主要包括:闸门开关过程中水位调整时间较长、闸门运行过程中各闸门之间开度存在偏差。为解决这些问题,必须改变现有的控制系统。
协同控制(Synergetic control)就是自组织过程,主要是指在一定边界条件下由系统中所出现的某个(或某些)序参量运用正反馈作用对系统中各子系统产生支配和控制作用,从而使系统趋于协同的过程。对于协同控制的应用,主要有:航天器系统的协同运动,多U A V之间协同任务规划问题,物流系统分散式协同处理等;而对于协同纠偏控制,目前仅查到文献研究了连续平压板厚自动纠偏协同控制。对于气动盾形闸门采用协同纠偏控制的研究尚无先例。
针对气动盾形闸门使用过程中出现的问题,结合协同控制的特点,我公司研发了一套气动盾形闸门协同纠偏控制系统。通过仿真验证和现场实际使用,该系统较好解决了闸门之间开度存在偏差的问题,并提高了水位控制精度。
1 控制系统设计
1.1 协同校正原理
自校正协同,是由控制中介通过在同一控制系统的终端之间建立交叉耦合结构,对每个执行器的输出实施协同校正,进而实现输出相同物理量的同步控制。交叉耦合控制是一种将同步误差进行反馈从而达到抑制效果的方法,符合最基本的控制规律。在多执行器控制系统中,交叉耦合的实现是将其中某一执行器的输出变换作为其他执行器的参考输入。如果各执行器的输出互为参考输入的一部分,其控制方式即为等状态方式,各执行器之间协调关系由同步系数决定。这种结构注重系统的整体性能,不存在滞后问题,具有较强的干扰抑制能力。
1.2 协同纠偏控制系统整体结构
假设系统有n组闸门,基于自校正协同控制的气动盾形闸门纠偏控制系统结构如图1所示。其中,Φ0为根据给定水位换算成的给定闸门倾斜角度;Φ1、Φ2、…、Φn为每组闸门实际倾斜角度;e1、e2、…、en为每组闸门实际开度与系统给定值之间的偏差。
在各执行器位置控制器的输出上,附加了同步误差作为补偿,各执行器的跟踪误差和控制相互制约,同步控制器输出的附加控制量通过某种算法u0=f(ex,ey)来获得,再经特定的分配算法附加到每组闸门位置控制器的输出上。
附加控制量可按一定比例分配给各组闸门控制执行器,使各执行器的附加作用所产生的补偿效果与同步误差的作用相反。补偿作用的强弱体现在耦合控制算法参数的大小上。将各执行器的误差校正因子a1、a2、…、an,分别引入到各组闸门的控制器中进行误差补偿。误差校正因子取值的大小由现场实际水流大小、水位深浅等因素决定,但由人为取值,很难达到最佳。因此,本文通过在跟踪回路中引入模糊跟踪控制器来补偿协同校正对闸门控制的影响。

图1 气动盾形闸门协同纠偏控制系统整体结构图
1.3 模糊跟踪控制器设计
模糊控制器主要包括:输入模糊化接口、输出反模糊化接口、模糊推理机及知识库。
1.3.1 输入/输出值的模糊化
为了增强控制系统的性能,将模糊控制器的输入为气动盾形闸门协同控制系统中执行器输出的误差e和误差变化率e c,e和e c的论域范围为[-3,3];输出为对原控制量进行作用的增益kp,其论域为[-10,10]。输入量、输出量的模糊集均为﹛N B,N M,N S,Z O,P S,P M,P B﹜。
1.3.2 模糊控制算法的设计
设计理念:将所有角度仪测得的值进行计算得出平均值,每组闸门与平均值对比,当差值大于平均值时控制系统将输出负值进行调节,即闸门下降;当差值小于平均值时控制系统将输出一个正值进行调节,即闸门上升。其模糊控制规则如表1。

表1 模糊控制规则
表1中的模糊控制规则可用如下语句描述:
1.3.3 输出模糊决策
根据模糊量求得精确量。确定表达模糊控制规则的模糊关系,及给定某时刻e和e c,推理求得kp。之后再对输出值进行反模糊化,得到精确值,即可对各组闸门误差校正因子做出决策。
2 系统仿真与应用
将本文设计的协同纠偏控制系统应用在德江玉龙湖下游气动盾形闸门系统中。德江玉龙湖气动盾形闸门系统主要用于城区湖河治理,同时兼顾景观效果;玉龙湖下游河道景观坝跨度45米;气动闸有6组,每三片为一组、共用一个气袋支撑,每片闸门尺寸为5.0m*2.5m;最高挡水高度H为5.0米,水位传感器0~5.5m;对应工作压力0.12MP a,气泵压力1MP a,安全泄压阀0.18MP a,测量压力传感器0~1MP a、0~0.3MP a;每组闸门对应一个角度传感器,倾角传感器θ:0~80°。
假设水位高度h要求控制在4.0米,对应的闸门倾角应控制在:

为了验证本文设计的协同纠偏控制系统的性能,特将该系统与采用P I D控制的原系统进行仿真验证,仿真结果见图2、图3。图2为在稳态情况下,1~6组闸门的开度,其中“*”表示采用P I D控制系统的开度,“o”表示采用协同纠偏控制系统的开度;图3为水位调节过程,其中蓝线表示P I D控制的调节过程,红线表示采用协同纠偏控制系统的调节过程。

图2 闸门角度仿真对比
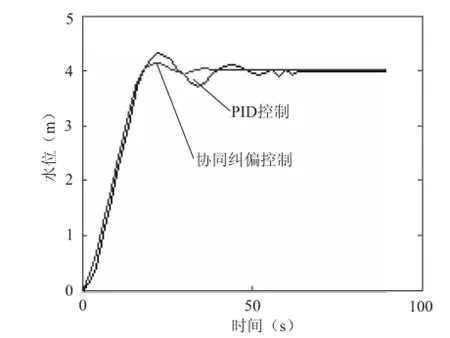
图3 水位控制仿真对比
由图2、图3的仿真结果可知,采用协同纠偏控制系统时,每组闸门之间的开度偏差减小,水位调整的幅度和调节时间均有所减小,能够满足现场控制需要。因此,进一步将本系统应用在德江玉龙湖下游气动盾形闸门的实际系统中,实际使用效果见图4、图5。其中,图4为稳态情况下,实际闸门开度对比,图5为实际水位调节过程对比。

图4 实际应用角度偏差对比

图5 实际水位控制对比
闸门开度偏差统计分析结果见表2,水位控制误差统计分析结果见表3。

表2 闸门开度偏差的统计分析结果

表3 水位误差的统计分析结果
由图4、图5和表2、表3的分析,可得出如下结论:
(1)每组闸门之间的开度偏差由原来的最大偏差6.5降到了2.8,其平均相对偏差由原来的0.0627降到了0.0233。说明协同纠偏控制系统较好了解决了原系统闸门开度偏差的问题。
(2)采用P I D控制的系统超调量和调节时间分别为10.8%、70s,而采用本文设计的协同纠偏控制系统的超调量和调节时间分别为5.0%、45s,均比原P I D控制的参数有较大幅度的减小。
(3)采用P I D控制的最大绝对误差为0.42,平均相对误差为0.2136,均方误差为0.1435;而采用协同纠偏控制的最大绝对误差为0.20,平均相对误差为0.0647,均方误差为0.0536,均比P I D控制有较大降低,系统收敛性更好。说明气动盾形闸门的协同纠偏控制系统提高了水位控制精度。
3 结论
本文针对气动盾形闸门在使用过程中的闸门开度存在偏差、水位控制精度不高的问题,设计了一种协同纠偏控制系统,并将该系统应用到德江玉龙湖下游气动盾形闸门中。通过仿真及现场实际使用效果对比分析,协同纠偏控制系统较好的解决了闸门开度偏差、水位控制精度不高的问题,为气动盾形闸门在我国的进一步推广打下了坚实的基础。
[1]冀振亚,高国柱,孙云峰.气动盾形闸门 系统力学模型的建立与分析[J].水利规划与设计,2013(11).
[2]FANG Hongwei,LIU Bin,HUANG Binbin.Diagonal cartesian method for the numerical simulation of flow and suspended sediment transport over complex boundaries[J].JHy dr oE ng,2006,132(11).
[3]杨锋,冯磊华.气动盾形闸门的自适应模糊P I D控制策略研究[J].液压与气动,2014(9).
[4]龙妍.基于物质流、能量流与信息流协同的大系统研[D].华中科技大学,2009.
[5]王平,郭继峰,史晓宁,崔乃刚.基于时间状态的敏捷自主在轨服务航天器协同运动规划方法研究[J].控制与决策,2011,26(11).
[6]任敏,王克波,沈林成.多U A V协同突防规划与仿真[J].控制与决策,2011,26(1).
[7]J.Sudeikat,J.-P.Steghofer,H.Seebach.On the combination of topdown and bottom-up methodologies for the design of coordination mechanisms in self-organising systems[J].Information and software technology,2012,54(6).
[8]武曲.MD F连续平压板厚自动纠偏协同控制研究[D].华北林业大学,2013.
[9]罗杰.基于模糊控制智能灌溉控制系统研究[D].吉林大学,2011.
T V 66
A
1672-2469(2015)05-0047-03
10.3969/j.i s s n.1672-2469.2015.05.016
杨 锋(1979年—),男,工程师。
科技型中小企业技术创新基金“气动盾形闸门智能协同控制系统”(12C 26214304732项目编号)。
