基于ARM的交流异步电机控制与馈电系统设计
2015-12-15张斌斌殳国华丁君武
张斌斌,殳国华,丁君武
(上海交通大学电子信息与电气工程学院,上海 200240)
0 引言
随着计算机技术及数字控制技术的飞速发展,以微处理器为核心的全数字化电动机控制系统已经被广泛采用。最早在电动机控制系统中广泛应用的是通用单片机,然而受到自身结构的限制,处理速度都比较慢,难以满足控制精度及性能的要求。20世纪80年代出现了数字信号处理器(Digital Signal Processor,简称DSP),其数据运算速度快,并具有强大的I/O控制功能,使其成为电动机控制中最常用的控制器。而近阶段随着(Advanced RISC Machines,简称ARM)芯片的出现和迅速发展,ARM处理器核因其卓越的性能和显著优点,已成为高性能、低功耗、低成本嵌入式处理器核的代名词。一些基于ARM核的微控制器都可支持DSP运算并能够达到更快的运算速度,以其作为整个系统的控制单元,能够弥补单DSP芯片在控制方面的不足,节约成本并降低系统的复杂性[1-2]。
本文设计了一种基于ARM核微处理器的交流异步电机控制与馈电系统,其控制精度高、实时性好、动态响应快,并能够将电机再生制动产生的能量回馈至电网[3],完成再生制动能量的高效利用。
1 系统总体设计

图1 系统总体硬件框图
图1 给出了交流异步电动机控制及馈电系统的总体结构框图,整个系统为交直交变压变频电路,由主回路、控制回路、逆变回路及信号采集电路几部分组成。主要包括交流异步电动机、基于ARM微控制器的运算控制单元、基于(Intelligent Power Module,简称IPM)智能功率模块的主回路功率变换单元及逆变单元和反馈信号检测单元组成。
2 系统硬件设计
2.1 控制电路
控制电路采用ST公司的STM32F407微控制器作为系统的核心。STM32F407系列是基于高性能的ARM®CortexTM-M4F的32位(Reduced Instruction Set Computer,简称RISC)内核,工作频率高达168 MHz,支持所有ARM单精度数据处理指令和数据类型的单精度浮点单元。它还实现了一套完整的DSP指令和内存保护单元,从而提高了应用程序的安全性。其内部含有1 M字节的FLASH闪存和高达192 KB的(Static Random Access Memory,简称SRAM),包括3个高精度12位(Analog to Digital Converter,简称ADC)和两个用于电机控制的(Pulse Width Modulation,简称PWM)定时器,特别适用于本系统的电机驱动与控制,其丰富的系统资源也为以后的功能扩展提供了空间。
ARM微控制器的主要任务是产生驱动IPM逆变单元的PWM信号。通过按键输入获得系统的参数设定信息及指令,并实时检测三相异步电机的直流母线电压、相电流和转速信号,进行计算形成驱动逆变器工作的PWM开关信号,最后通过(Flexible Static Memory Controller,简称FSMC)接口将相关信息显示于(Liquid Crystal Display,简称LCD)上。当系统发生故障时,控制器也能立刻响应进行中断保护。
2.2 功率变换电路
系统主电路采用的是交-直-交电压源型变压变频器,整流单元采用不可控二极管整流桥,滤波环节采用了大容量电解电容和小容量薄膜电容滤除脉动和干扰。
传统的逆变电路是由六只全控型开关器件(Metal-Oxide-Semiconductor Field Effect Transistor,简称MOSFET)组成的三相桥式电路,为了提高系统的集成度和稳定性,本系统采用三菱公司生产的IPM智能功率模块PS21564作为逆变单元。PS21564内部集成了六个高速低功耗的(Insulated Gate Bipolar Translator,简称IGBT)管芯,最大耐压600 V,最大电流15 A,最大开关频率可达数百KHz,最小死区时间2 μs。以其作为系统逆变电路的功率开关器件,兼有(Giant Transistor,简称GTR)高电流、低饱和电压和高耐压以及MOSFET高输入阻抗、高开关频率和低驱动功率的优点。IPM模块内部集成了驱动、检测和保护电路,不仅大大减少了系统的体积,也提高了系统的稳定性和可靠性。其内部的IGBT桥式拓扑如图2所示。
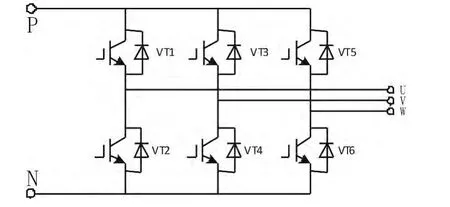
图2 逆变电路的IGBT桥式拓扑
为了保护ARM控制电路尽量不受到主电路的影响,故将所有与ARM控制器相连的信号电路 都添加了光耦隔离电路。本设计选择安捷伦公司专为IPM等功率器件设计的光电隔离接口芯片HCPL4504作为PWM信号的驱动隔离光耦,其响应时间小于0.3 μs,内部集成了高灵敏度光传感器,极短的寄生延时确保了高速开关死区时间的安全。光耦输出端的信号再经过六重施密特触发器40106B整形滤波后输入到IPM相应信号端,其驱动电路如图3所示。
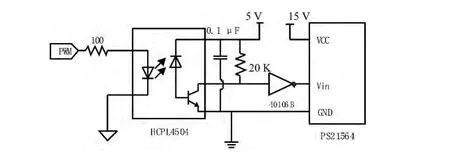
图3 IPM驱动电路
当变频器驱动异步电机减速时,电机转子的旋转速度会超过给定频率下的同步旋转磁场的转速,造成转子切割磁感线的方向反向,使电机工作于发电制动状态,能量将从电机侧回馈至直流侧,其能量大小与系统的转动惯量、转速、电机参数等因素有关[4]。回馈能量将导致直流母线电压上升,即泵升电压。若电动机制动时间较短,或者长时间工作在再生制动发电状态时,泵升电压过高将对变频器造成损坏。
针对上述问题,本设计增加了一种并网逆变装置,采用(Space Vector Pulse Width Modulation,简称 SVPWM)控制策略[5]。当异步电机处于电动运行状态时,逆变装置开关管均被封锁,处于关断状态。当电机处于再生制动状态时,回馈能量使直流母线电压超过某一设定值VH时,逆变装置开始工作并从直流线路吸收电流,将能量回馈至电网,同时稳定直流侧电压。当直流母线电压下降到另一设定值VL时,逆变器停止工作。
2.3 信号检测电路
2.3.1 电流、电压检测单元
由于本控制系统中定子电流检测的精度和实时性是整个控制精度的关键,普通的电流传感器难以满足要求。所以选用LEM公司生产的霍尔电流传感器LTS6-NP来检测电机的动态电流,其检测精度高,相应速度快,完全满足本系统的需要。三相异步电机属于三相平衡系统,故只需用霍尔电流传感器测量定子两相电流,便可知道第三相电流大小。
LTS6-NP自带了上拉电阻,可以直接输出电压信号。当电机正常运行时,霍尔传感器输出的是单极性的类正弦电压信号,而STM32控制器的ADC模块输入的电压信号范围是0~3.3 V,故需加入电压偏移和信号放大电路。采用运放用作信号放大,并取参考电压Vref作为电平偏移电压,电流检测信号处理电路如图4所示。
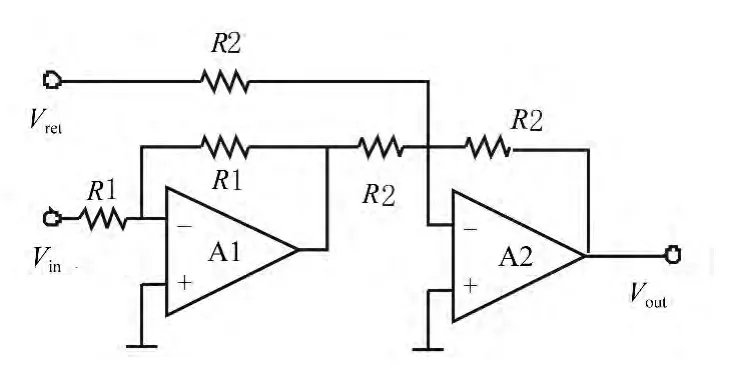
图4 相电流检测信号处理电路
由图4可以得出输出信号Vout和输入信号Vin的关系:
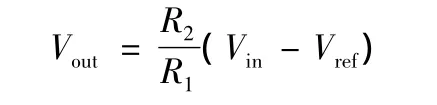
由上式可以看出Vref完成了输入电压的偏移,而通过调节R2和R1的比值即可调节输出电压的大小,完成信号的放大。
直流母线电压同样采用LEM公司的霍尔电压传感器LV25-P进行检测,输出信号经信号放大和限幅电路输入A/D接口。通过对直流母线电压的精确检测与控制可以确保IGBT单元的安全使用,并为并网逆变电路的启用和关断提供了触发信号。
2.3.2 转速检测单元
由于本控制系统的控制算法需要转子的转速作为反馈信号参与计算,采用增量式编码器ZSP3806-003G-2048BZ1-5L作为系统的速度传感器,其检测精度完全满足调速系统的控制精度与稳定性。该编码器有A相、B相和Z相三路输出。其中A相、B相相差90度,每转一圈输出2048个脉冲,主要用于转速检测;Z相每转一圈输出一个脉冲,主要用于定位。将STM32控制器的高级定时器设置为编码器接口模式,即可与传感器输出信号相连测量输入脉冲数,进而得到转子的转速信息。
3 控制策略
在电力电子器件和变频技术不断发展的同时,先进的控制方法也在不断推陈出新,目前应用比较广泛的是高性能的矢量控制[6-7]和直接转矩控制技术[8]。本控制系统使用矢量控制方法,采用速度外环、电流内环控制的双闭环结构形式,与传统的V/F变频调速方法相比,控制精度高,动态性能好。异步电机矢量控制基本结构框图如图5所示。
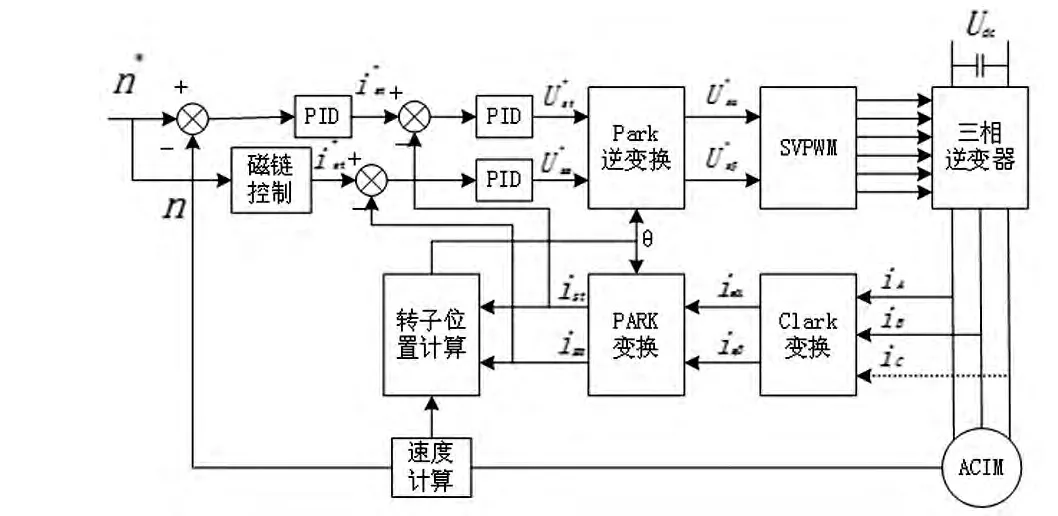
图5 异步电机矢量控制基本结构框图
异步电动机是一个多变量、强耦合、高阶的非线性系统,矢量控制的主要思想是通过坐标变换将定子电流分解为按转子磁链定向的励磁分量ism和转矩分量ist,并对这两个分量分别进行控制,从而可以使异步电机像直流电动机一样进行控制。由电机的在同步旋转正交坐标系上的数学模型可以推导出转子磁链ψr和电磁转矩Te表达式为
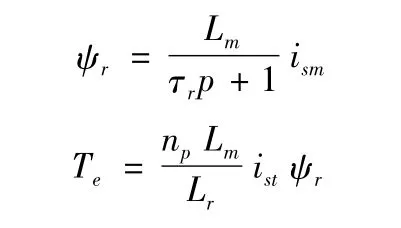
由上式可见,转子磁链ψr仅由励磁分量ism产生,而电磁转矩Te正比于转子磁链ψr和转矩分量ist,由此实现了定子电流励磁电流分量和转矩电流分量的解耦。
在异步电机额定频率及基频以下时,通常采用恒磁通调速,励磁电流ism保持不变,为额定值,属于恒转矩调速;而在基频以上采用弱磁调速,励磁电流ism随着转速的增大而减小,属于恒功率调速。该控制方法驱动三相逆变器时使用了SVPWM方法[9],可以控制三相电机的定子产生逼近理想磁通圆的实际磁通,提高了直流侧电源电压利用率,且计算简单,开关损耗小,实现起来方便,正逐渐取代传统的(Sinusoidal Pulse Width Modulation,简称SPWM)技术[10]。
4 系统软件设计
本控制系统的软件设计主要包括主程序、中断服务程序及各个子程序模块。
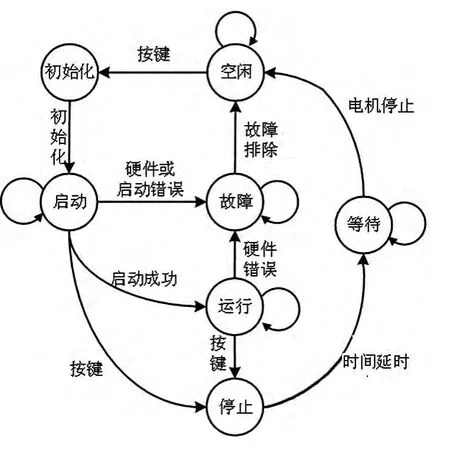
图6 主循环状态机
主程序对定时器、ADC、按键与LCD接口等外设和各变量进行初始化,设置相应中断后,便进入一个主循环状态机,完成系统的电机控制任务及故障信息的检测。主程序的主循环状态机如图6所示。
中断服务程序是系统的核心部分,主要完成电流、电压及转速检测、矢量控制算法实现、SVPWM调制及故障中断处理等。其中矢量控制算法中断服务程序流程如图7所示。
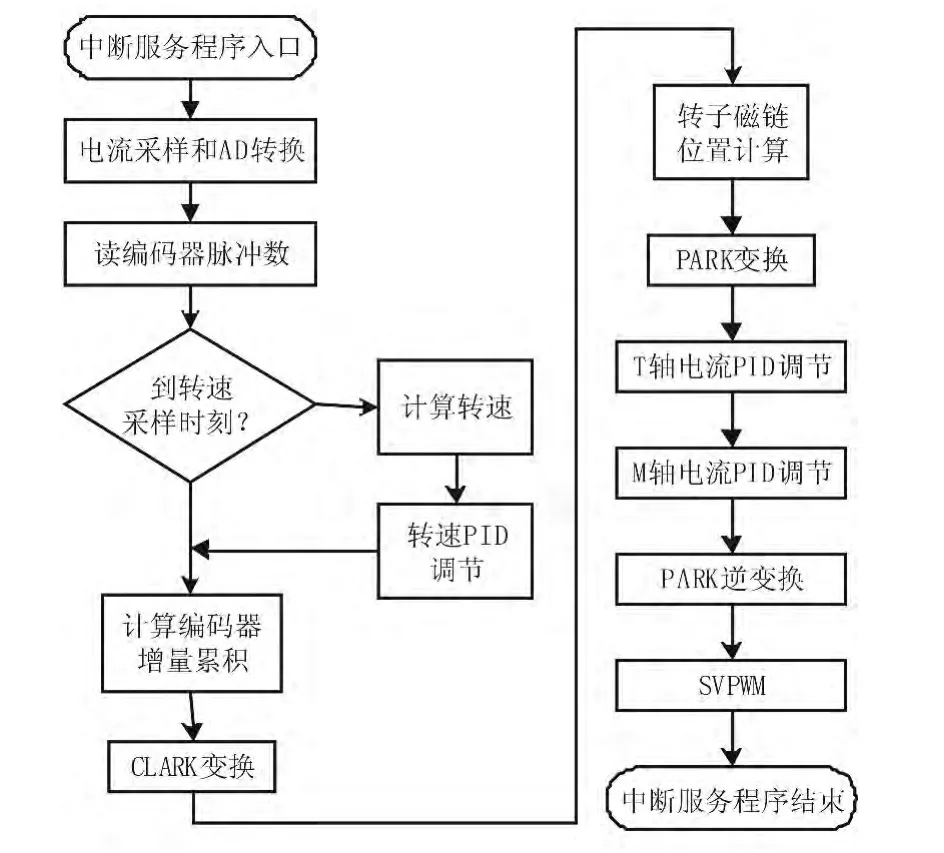
图7 矢量控制算法中断服务程序
5 系统测试与结果
根据以上设计方案,制作了硬件实物并在一台鼠笼式异步电机上进行了测试,电机额定电压220 V,额定电流 4.25 A,额定频率150 Hz。系统控制参数及反馈相关信息可显示于LCD屏上[11],如图8 所示。
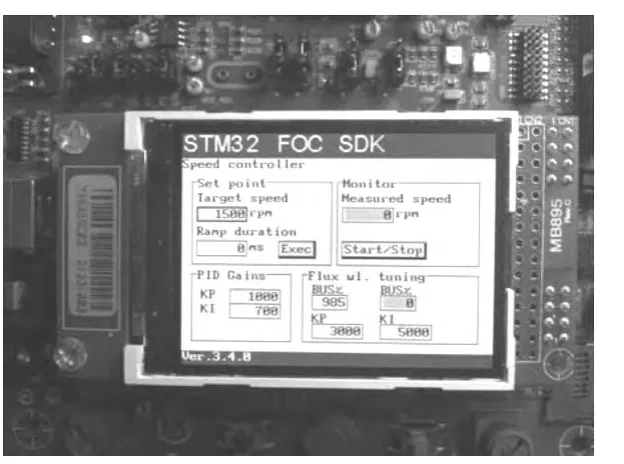
图8 控制系统LCD显示
电机在基频以上运行经转换测得的励磁电流ism随定子频率变化规律如图9所示。
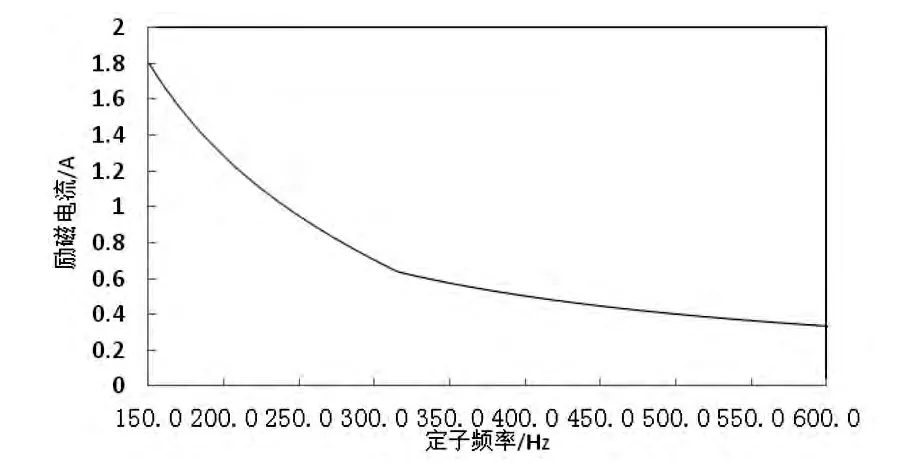
图9 定子励磁电流波形图
6 结束语
本文所设计的三相交流异步电机调速系统,充分利用了ARM微控制器的高速运算能力及丰富的片上资源,并且采用了集成化的IPM模块作为逆变单元,简化了硬件设计,增强了系统的可靠性。加入的再生制动逆变单元也很好的抑制了直流侧过高的母线电压,解决了回馈能量的损耗问题,提高了系统的安全性和实用性。实验测试结果表明,整个系统控制精度高,实时性好,并且实现了异步电机的四象限运行,节能效果明显,拥有广阔的应用前景。
[1]杨旭强,吴红星,金钊.基于ARM的电动机控制技术[M].北京:中国电力出版社,2008.
[2]交流电机数字控制系统[M].北京:机械工业出版社,2002.
[3]张秋瑞,毕大强,葛宝明.地铁再生制动能量逆变回馈电网装置的研究[J].电力电子技术,2012,46(9):61-63.
[4]张承慧,杜春水,李珂.变频驱动异步电机再生制动及馈电技术[J].电机与控制学报,2006,45(4):356-360.
[5]张敏,江博,杨磊,等.基于SVPWM的新型光伏并网逆变器的研究[J].电气技术,2010,11(9):36-39.
[6]孙鹏飞,冯晓云.基于DSP异步电动机矢量控制系统的设计与实现[J].电力电子技术,2010,44(7):40-41.
[7]刘娟,胡泽,庄培.基于DSP的电动车用感应电机矢量控制研究[J].科学技术与工程,2013,13(18):5325-5328.
[8]王继忠.感应电动机直接转矩控制技术的发展[J].微电机,2012,41(2):83-87.
[9]沈浙,乔鸣忠,张晓锋,等.SVPWM异步电动机矢量控制系统研究[J].船电技术,2009,29(4):1-4.
[10]张大为,刘迪,高艳丽.SPWM变频调速在交流异步电动机控制中的应用[J].船电技术,2012,32(2):30-32.
[11]潘宗衢,赵益民,路宏敏.基于ARM的LCD图像显示系统设计[J].数字技术与应用,2012,33(7):126-127.
