顶部驱动钻井转速扭矩控制技术研究及应用
2015-12-15王博张尧马瑞孙明寰谢海欢
王博,张尧,马瑞,孙明寰,谢海欢
(北京石油机械厂,北京 100083)
0 引言
顶部驱动钻井装置(简称顶驱)是当今钻井装备中技术含量较高、结构复杂的机电液一体化设备,已成为现代钻机的重要配置,是21世纪钻井三大技术装备之一[1]。与传统钻井设备相比,顶驱可极大地提高钻井作业的效率和安全性,推进了钻井的自动化进程[2]。钻井作业时需要根据地层构造来控制钻头转速和扭矩,作为驱动钻头的动力源,顶驱装置必须保证输出转速和扭矩精确可控。基于闭环矢量控制的交流变频调速技术,因其具有无级调速、调速范围较大、较强过载,显著节能等诸多优势,可以满足钻井作业对转速和扭矩控制的要求,在石油钻机,尤其是顶驱装置上得到了广泛应用[3]。
1 技术背景
1.1 交流变频调速
20世纪70年代后,大规模集成电路和计算机控制技术的发展,以及现代控制理论的应用,使得交流电力拖动系统逐步具备了宽的调速范围、高的稳速范围、高的稳速精度、快的动态响应以及在四象限作可逆运行等良好的技术性能,在调速性能方面可以与直流电力拖动相媲美[4]。交流变频器一般采用交-直-交结构,利用电机的转速和频率成线性关系的原理,把工频(50/60 Hz)变换成各种频率的交流电源,以实现电机的变速运行。用于交流异步电动机的调速,调速范围广、节能显著、稳定可靠,交-直-交变频器结构如图1所示。

图1 交-直-交变频器典型结构
1.2 矢量控制技术
矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,将异步电动机的定子电流矢量分解为产生磁场的电流分量(励磁电流)和产生转矩的电流分量(转矩电流)分别加以控制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式称为矢量控制方式[5]。这样就可以将三相异步电机等效为直流电机来控制,不仅可在调速范围上与直流电动机相匹配,而且可以控制异步电动机产生的转矩,因而获得与直流调速系统同样的静、动态性能,带速度反馈的矢量控制原理如图2所示。
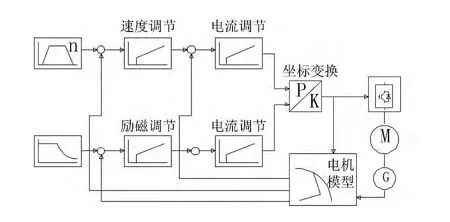
图2 矢量控制原理
2 常见解决方案
基于以上基础技术的优越性考虑,目前已经得到广泛应用的,名义钻深在7 000 m及以上的顶驱,一般都采用交流变频技术,两台三相异步电机驱动的配置,这种配置主要有以下三点好处:
双电机可以在顶驱主体上对称布置,较好的解决顶驱本体重心居中;
双电机可以均分负载,单个电机承担的负载仅为实际负载的一半,有效延长轴承、齿轮等机械承载件的使用寿命;
双电机可以互为备份,出现问题时可以单电机降低负载使用。
双电机顶驱优势明显,但同时也增加转速同步和负载均分的技术难度。各电机输出扭矩的方向和大小一致,实际输出扭矩等于各电机输出扭矩之和,一般将这种技术称为电机同步。实现电机同步,目前常见的解决方案有以下二种:
2.1 双电机并联连接
两台电机接线采用并联连接在一台变频器上,变频器将两台电机作为一台电机驱动,输出电流由电机绕组均分。
根据三相异步电机转速公式n=60f(1-s)/p[6],在两台电机参数完全一致、齿轮间配合间隙近乎为零的理想情况下,因输入频率f、电机极对数p,转差率s都一样,两台电机的转速n是完全一致的。同时,由于两台电机分得的输入电流也一样,其产生的输出扭矩也是完全相等的,由此实现双电机同步,负载均匀分配。
这种解决方案的优点是变频系统设计相对简单,不需考虑电气同步,完全依赖电机特性和较小的啮合间隙实现机械同步。缺点是随着使用时长的增加,齿轮磨损后啮合间隙增大,其同步性能下降,两台电机的输出扭矩有相当部分被互相抵消,且无法被控制系统感知并修正,导致显示输出扭矩不等于实际值,进而影响对井下情况的分析判断。
2.2 双电机各自独立连接
两台电机分别连接两台变频器,一台变频器控制一台电机的转速和扭矩,作为主动。另一台变频器只控制另一台电机的扭矩,作为从动,并使从动电机的输出扭矩始终跟随主动电机,并严格保持一致。
在这种解决方案中,主动电机需要编码器提供速度反馈,并根据速度设定值与实际值之间的偏差来调整电机的转速和扭矩,从动电机不需要编码器提供的速度反馈,只根据与主动电机输出扭矩之间的偏差来调整电机的转速和扭矩。
这种解决方案的优点是充分考虑了齿轮间必然存在的啮合间隙,以及由此产生的两台电机之间的转速差。这样即使电机自身特性发生变化,或者齿轮啮合间隙增大,变频器也可以通过控制电机输出不同的转速和相同的扭矩,对两者之间的差异做出补偿,实现输出扭矩完全等于实际输出扭矩。其缺点是需要两套各自独立,但又有相互联系的变频系统,设计难度、软件硬件成本都成倍增加,对制造商提出了更高的要求。
综合比较二种解决方案,第二种方案具有明显的技术优势,因此各顶驱制造商都逐渐放弃第一种方案,转而采用第二种解决方案。
3 应用
北京石油机械厂与西门子工厂自动化工程有限公司合作研制开发基于西门子新一代S120驱动系统的顶驱装置,采用主从控制实现同步,已有超过200台S120系统的顶驱在世界各地成功应用,成为目前世界唯一批量应用S120系统的顶驱装置制造商。下面以DQ70BSC型号顶驱为例,介绍基于闭环矢量控制的S120系统转速扭矩控制技术,以及在此基础上,顶驱单、双电机切换,主从控制等技术的应用。
顶驱电控系统采用二对二的驱动方式,即两个逆变柜分别驱动两台电机,这种结构可靠性高,可作为两套独立的系统单独工作。单电机工作时,系统所能承受的工作扭矩和最大扭矩为双电机运行时的一半。驱动采用西门子S120系列产品,通过交流变频调速系统,驱动两台交流变频电机,两台电机既可以联合驱动,也可以分开独立工作。主传动采用两台三相六极异步感应电机,交流变频驱动。顶驱驱动系统单线图如图3所示。

图3 顶驱驱动系统单线图
因单电机运转时不涉及速度同步,在此不作详细分析,下面就双电机运转时的速度同步和扭矩分配展开讨论。
3.1 速度同步
双电机运转时,其中一台电机作为主动电机,工作在速度控制模式下,变频系统会同时控制该电机的转速和扭矩;而另一台电机作为从动电机,工作在扭矩控制模式下,变频系统只控制该电机的扭矩。下面以A电机做主动,B电机做从动为例,介绍主从同步。
3.2 扭矩限定和分配
在变频系统中,扭矩设定值为一个整形(INT)数据,占用一个字(两个字节)的长度,其中高字节的最高位为符号位,电机允许短时间内150%的过载,因此100%的额定扭矩设定,对应的二进制数值为 0011.1111.1111.1111,换算成十进制即 16 384,为防止溢出,取16 383。在双电机模式下,要求单个电机输出扭矩为总输出扭矩的一半,因此在PLC系统中,双电机模式下扭矩限定值应将设定值除以2,做如下编程:
CALL#TORQUE_DRILL
SETPOINT:= ”Setpoint”.torque_set_drill
AN "M_A+B"
JNB _016
L "Setpoint".torque_set_drill
L 2
*I //双电机模式时扭矩限定值除以2
T "Setpoint".torque_set_drill
_016:NOP 0
变频系统通过Profibus自由报文接收PLC系统传送过来的扭矩限定值,送到电机模块的扭矩限幅功能块中,其功能图如图4所示。
3.3 主动电机速度和扭矩控制

图4 扭矩限幅功能图
在变频系统中,速度设定值为一个整形(INT)数据,占用一个字(两个字节)的长度,其中高字节的最高位为符号位,同时电机允许在200%额定转速运转,因此100%的额定转速设定,对应的二进制数值为0011111111111111,换算成十进制即16 384,为防止200%额定转速设定时数据溢出,取16 383。在PLC程序里,主动电机的速度设定值应做如下编程:
CALL #SPEED
SETPOINT:= ”Setpoint”.speed_set
A M1.5
JNB a001
L“Setpoint”.speed_set
L 2
*I //顶驱高速时速度设定值乘以2
T“Setpoint”.speed_set
a001:NOP 0
变频系统通过Profibus自由报文接收PLC系统传送过来的转速设定值,送到主动电机模块的速度设定功能块中,根据速度设定值与编码器反馈的速度实际值之间的偏差,变频系统通过PI调节器计算出需要调整的扭矩设定值,扭矩设定值被传输到主动电机模块的扭矩设定功能块中,如图5所示。
此时电机模块工作在速度控制模式下,主动电机将按照设定的速度运转,输出扭矩不超过扭矩限定值。
3.4 从动电机扭矩控制
从动电机不受速度设定值的限制,只需要严格保持与主动电机输出扭矩相等即可。为达到这个目的,可以将从动电机模块切换到扭矩控制模式,然后直接将主动电机的实际扭矩输出值作为从动电机的扭矩设定值,如图6所示。
从图中可以看到,与主动电机模块明显不同,从动电机模块工作在扭矩控制模式下,扭矩设定值源于CU_S_008:r20225,而此时r20225中的值正是主动电机模块的r079,即主动电机的实际输出扭矩值。

图5 主动电机扭矩限幅功能图

图6 从动电机扭矩限幅功能图
通过以上流程,巧妙的利用变频系统中的内存交换,极其方便的实现了主从电机之间实际扭矩输出值的传递,由于这种传递是在变频系统控制器的不同内存区域间进行的,几乎不存在交换时间,因此相对于6SE70系统采用的Simolink光纤同步,S120系统的内存交换可以保证极高的数据实时性。
4 结束语
北石顶驱采用本文阐述的解决方案,使用S120系统作为电机驱动系统,并成功实现现场批量应用。实践证明,本方案充分利用S120系统的新特性和新功能,优化控制精度,使顶驱输出转速更平稳,输出扭矩更均衡,更好地满足复杂钻井工艺对顶驱性能的苛刻要求。
[1]葛运锋.顶部驱动钻井装置电控系统的设计研究[D].北京:北京交通大学,2006.
[2]王耀华.超深井钻机顶驱动力系统研究[D].吉林:吉林大学,2012.
[3]刘广华.顶部钻井装置操作指南[M].北京:石油工业出版社,2010.
[4]郑月非.低压变频器的研发及异步电动机间接转矩控制策略的研究与设计[D].山西:太原理工大学,2010.
[5]苟婷婷.异步电动机矢量控制技术若干问题研究[D].陕西:西安电子科技大学,2010.
[6]马燕.异步电动机的转速公式与功率控制调速理论[J].西北民族大学学报,2005,26(56):21-25.
