控制点与检查点数量和比例对水深遥感反演精度的影响分析
2015-12-15梁建,张杰,,马毅
梁 建, 张 杰, , 马 毅
(1.大连海事大学, 辽宁 大连 116026; 2.国家海洋局 第一海洋研究所, 山东 青岛 266061)
利用光学遥感影像进行水深反演一直以来都是传统水深测图的有效替代手段。国内外学者在该领域开展了大量的研究工作[1-15]。与现场测量手段相比,遥感反演具有大面积同步、低成本和快速成图的特点, 尤其对现场测量无法抵达的区域, 遥感反演甚至成为获取水深的唯一可行手段。
目前常见的光学遥感水深反演模型主要有 3类,分别为: 理论模型、统计模型和半经验模型。其中半经验模型是将理论模型进行参数简化, 然后利用统计回归的方式反演获得水深。这种模型既具有一定的物理意义, 又兼备简单易操作的特点, 且反演精度相对较高, 是目前水深遥感反演最常用的方法。半经验模型所需的数据除了遥感影像以外, 还需要一定数量的实测水深数据, 用作水深遥感反演的控制点和检查点。控制点用于建立实测水深值与遥感影像灰度值之间的定量关系, 检查点则用于评价水深反演模型的精度。因此控制点和检查点的选择也是使用半经验模型开展水深反演过程中的关键环节。但前人已有的工作中对于水深控制点和检查点的选择只有一些定性描述, 例如水深点的选取在空间上要尽量均匀分布以及水深点在不同水深段上也要尽量做到均匀分布[16]等。而对于可以量化的指标, 如水深控制点和检查点的数量以及比例, 以及由于这些数量的差异而对水深反演精度所造成的影响, 则未见研究报道。
针对这一问题, 作者以覆盖东岛的 WorldView-2、GF-1 WFV和Landsat8 OLI多光谱影像为数据源,拟使用6020个实测水深点, 基于半经验模型中的三波段水深反演模型, 选择不同数量和比例的水深控制点和检查点开展相关实验, 分析比较反演结果的平均绝对误差、平均相对误差和反映实测水深与反演水深相关性的决定系数R23种指标, 指出水深点数量变化导致水深反演精度变化的趋势并分析其原因, 最后给出水深控制点和检查点的建议数量。
1 数据与方法
1.1 数据及预处理
作者使用了三景覆盖中国西沙群岛东岛的光学卫星影像, 分别为 WorldView-2、GF-1 WFV 和Landsat8 OLI多光谱影像(图1), 影像数据的基本参数如表1所示。影像在使用前进行了以下预处理: 几何配准、辐亮度转换和FLAASH大气校正。

表1 影像参数Tab.1 Specifications of the test images
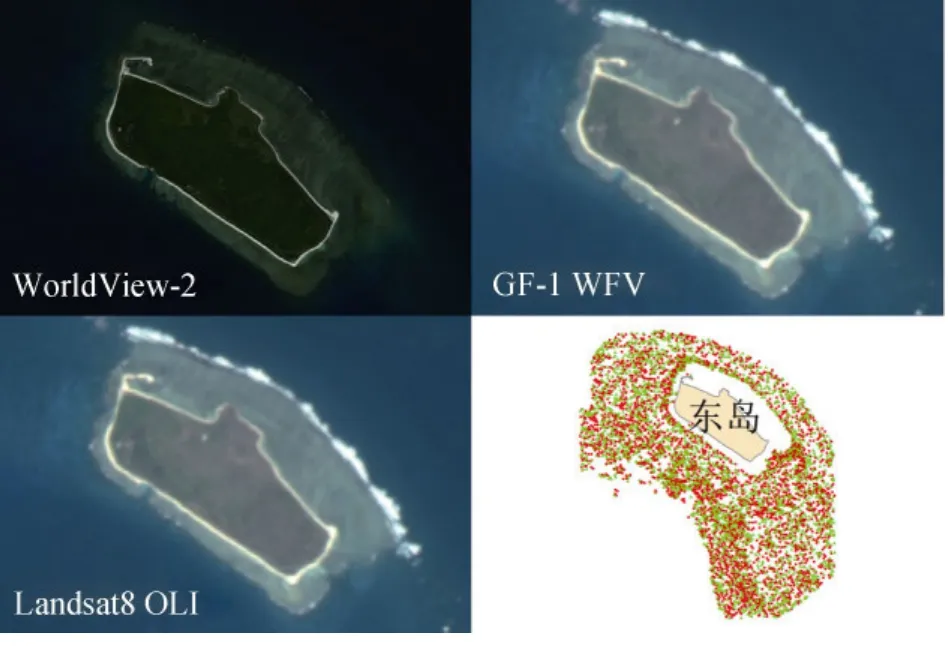
图1 东岛影像以及水深控制点(绿)与检查点(红)分布Fig.1 Images of Dong Island and distribution of control points (green) and check points (red)
由于 WorldView-2拥有更高的空间分辨率和自主定位精度, 因此以 WorldView-2影像为参考图像,配准另外两景影像, 配准中误差都在1像元以内。
辐亮度转换是开展图像大气校正的基础。对于不同类型的影像, 由原始DN值转换到辐亮度的计算公式会略有差异。以WorldView-2多光谱影像为例, 它的辐亮度转换的公式如下:

式中L(λi) 为第i波段的辐亮度, 单位为 W·m-2·sr-1·μm-1;absCalFactori为第i波段的绝对定标系数, 对WorldView-2的这 4个波段来说取值分别为0.01783568, 0.01364197, 0.01851735和0.02050828;Δλi为第i波段的等效波段宽度, 4个波段的值分别为0.0543、0.0630、0.0574 和 0.0989 μm。absCalFactori和Δλi可以从WorldView-2影像元数据(扩展名为.IMD)文件中查到。
多光谱影像的大气校正使用 ENVI 5.1软件的FLAASH模块进行, 得到的结果为遥感反射率。需要注意的是4波段的WorldView-2多光谱影像无法使用FLAASH中内嵌的 WorldView-2传感器模型进行处理(该模型适用于8波段WorldView-2影像), 必须使用自定义的4波段光谱响应函数作为输入。
作者收集到的原始实测水深点为33 508个, 通过与影像匹配, 初步筛选出21 908个水深点。由于水深点数量较多, 通过人工选取满足空间和水深段分布均匀的水深点是一项极其复杂繁琐的工作。作者所采用的方法是, 按照水深0.1 m间隔从0 m到30 m共计301个区间内分别随机取出20个点。然后再次随机将选出的6 020个点平分成两部分。一部分用作控制点, 另一部分用作检查点。将选出的点与影像叠加, 基本符合空间上均匀分布的原则。
接下来进行控制点和检查点数量的选择。需考虑3个因素: 首先无论选点多少, 都要保证均匀覆盖全部水深范围; 其次是选点数量尽量覆盖不同数量级, 以便结果能够更好地反映出变化趋势; 再次是尽量使所有点都有机会参与反演或评价。基于以上3点, 作者选取的控制点按数量分为9组, 检查点按数量分为3组。具体分组情况详见表2和表3。为保证实验结果的一致性, 无论控制点还是检查点, 前一组中的所有点均包含于后一组中。
在水深反演模型拟合之前, 需要对实测水深点进行潮汐校正。通过查阅历年潮汐表, 推算出WorldView-2、GF-1WFV和Landsat8 OLI影像成像时刻的潮高分别为0.70、0.55和1.28 m, 水深点的深度加上潮高值即为影像成像时刻的瞬时水深。
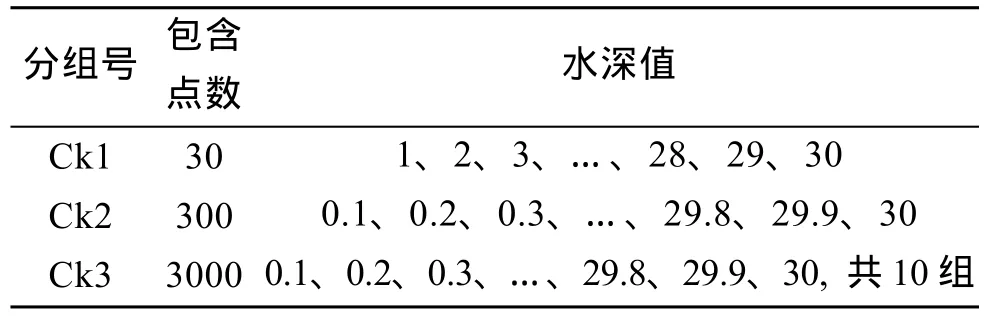
表3 检查点分组Tab.3 Groups of check points
1.2 方法
作者使用的半经验水深反演模型是基于以下公式[3-6]:

式中,i指波段号,Li是传感器接收到i波段的辐亮度;Lsi是最大水深区的辐亮度;Ci是与太阳辐照度、大气和水面透过率及水面折射等有关的常数;Rbi是底质反射率;ki是漫衰减系数;f是水体路径长度(通常取值2);Z为水深。
对公式(2)两边同时取对数并整理可得:


这就是单波段水深反演的模型公式, 式中的常数项A0和系数A1可通过实测水深值和影像灰度值统计回归得到。
在假设底质反射率的比值与底质变化无关的情形下, 通过公式(2)还可以导出双波段模型和多波段模型公式, 本文使用的三波段水深反演模型如下:

式中的常数A0, 系数A1、A2和A3均为待定项, 可通过统计回归得到。
2 结果与分析
控制点和检查点共计27种组合, 三景影像的实验结果分别如表4~表6所示, 表中列出了反演结果的MAE、MRE和反映实测水深与反演水深相关性的决定系数R2。
从中可以看出, 3个表格除对应位置数值大小有所不同之外, 它们所表现出来的整体趋势是非常相似的, 即: 随控制点数量的增加, 反演误差有1个明显的先减小后稳定的过程; 检查点数量不同, 评价的反演误差也有所不同, 但这种差异远不如控制点数量变化所导致的反演误差变化明显。
从控制点方面来讲, 当控制点数量很少时, 检查点验证的反演误差都比较大; 随着控制点数量的增加, 水深反演的误差迅速降低, 并趋于稳定; 当控制点数量继续增加时, 水深反演的误差非但没有进一步减小, 反而略有增大的趋势, 不过增大的程度都非常有限。而反演误差由大变小趋于稳定的拐点,基本上都位于 Ct3组控制点的位置, 此时控制点的数量为31个。

表4 WorldView-2影像的反演试验结果Tab.4 Inversion results of WorldView-2 image
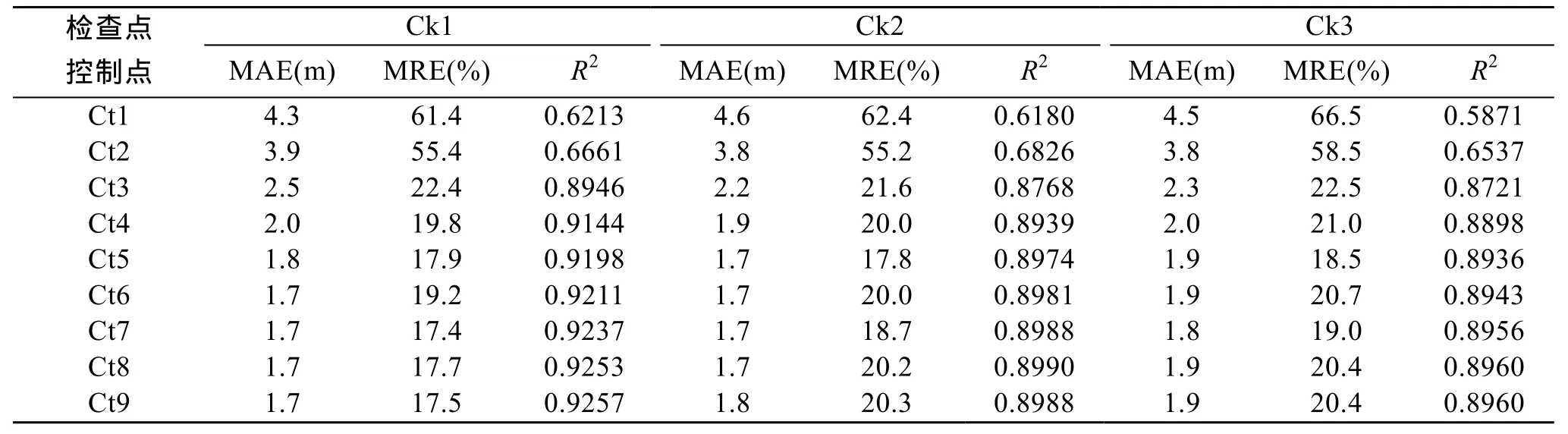
表5 GF1影像的反演试验结果Tab.5 Inversion results of GF1 image
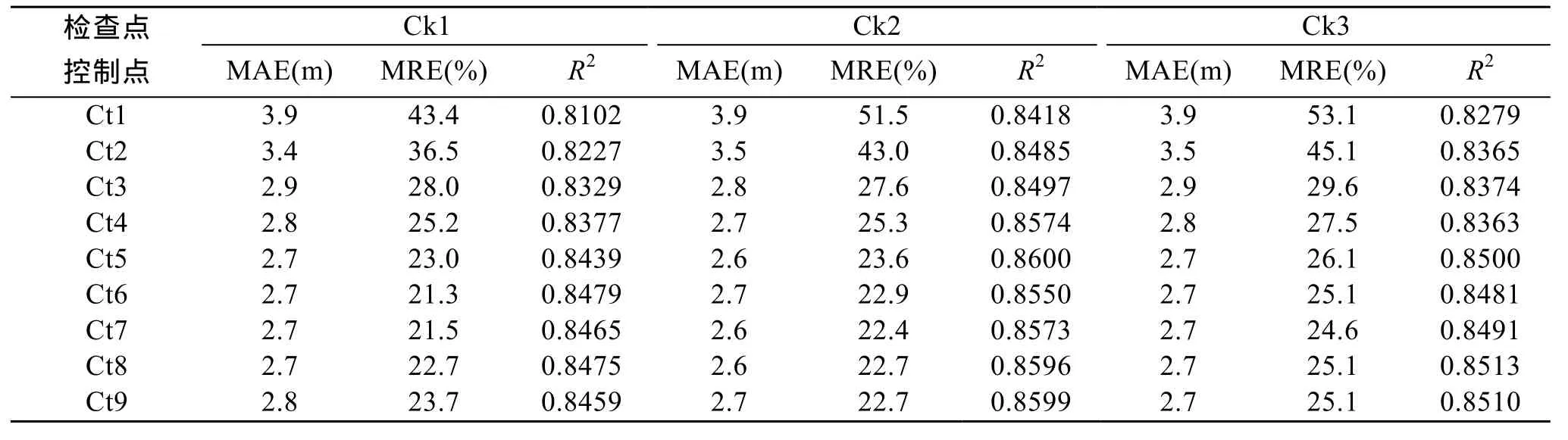
表6 Landsat8 OLI 影像的反演试验结果Tab.6 Inversion results of Landsat8 OLI image
从检查点方面来讲, 虽然 3组检查点在数量上都存在数量级的差异, 但用它们计算所得的误差都非常接近。实验结果也没有显示出反演误差与所选检查点的个数之间存在相关性。这说明, 在保证检查点在各水深段分布均匀的情况下, 检查点的数量不会对水深反演结果的评价产生明显影响。
除此以外, 实验结果中还有一个共同点, 即反演误差随控制点数量增加趋于稳定之后, 若继续增加控制点数量, 反演误差非但不会减小, 反而略有增大的趋势。这类似于高光谱中的 Hughes现象[16],但又有着本质的区别。在控制点数量很少时, 其代表性相对较差, 而利用得到的回归参数进行水深反演,精度较低; 随着控制点数量的逐渐增加, 其代表性逐渐改善, 致使反演精度提高并趋于稳定; 当控制点数量进一步增加, 其中包含的“坏点”数量逐渐累积, 进而影响到回归参数的计算, 并导致最终反演精度略有降低。此处所谓“坏点”往往都对应影像中的异常点, 例如太阳耀斑、白冠以及云等等。在人工选取控制点和检查点时, 这样的情况都可以排除。
从以上实验结果可见, 只要控制点、检查点在空间和水深段上都均匀分布, 可以认为水深反演的精度与控制点和检查点的比例没有关系。30个左右的控制点和检查点便可保证很高的反演精度, 选取过多的水深点, 不但增加工作量, 而且还对提高反演精度没有任何帮助, 这对于大多依靠人工从海图中提取水深点来开展的遥感水深反演作业模式来说,是非常有意义的。
3 结论
通过作者的实验, 可以得出以下结论:
(1) 当控制点数量达到 31个时, 水深反演精度即趋于稳定;
(2) 当检查点数量在 30个时, 其评价指标已可以代表模型反演精度;
(3) 控制点和检查点的数量比例对反演精度并无影响, 但控制点选取过多则会产生反演精度降低的现象, 采用人工选点时剔除异常点可有效避免这一现象。
作者使用的多光谱影像在空间分辨率的覆盖上不够全面, 只有2、16和30 m 3种, 除此以外其他空间分辨率的多光谱影像, 如5.8 m的ZY-3, 6.0 m的SPOT6, 8.0 m的GF-1 PSM和10.0 m的SPOT5多光谱影像没有涵盖。这主要是由于作者研究区位于热带, 云层的遮挡影响了可用影像数据的选择。此外作者实验仅用了三波段模型开展水深反演, 其他水深反演模型是否能得到同样的结论仍有待实验验证。
[1]Lyzenga D R.Passive remote Sensing techniques for mapping water depth and bottom features[J].Applied Optics, 1978, 17(3): 379-383.
[2]Lyzenga D R.Remote sensing of bottom reflectance and water attenuation parameters in shallow water using aircraft and Landsat data[J].International Journal of Remote Sensing, 1981, 2(1): 71-82.
[3]Polcyn F C, Sattinger I J.Water depth determination using remote sensing techniques[C]//Proceedings of the 6th International Symposium on Remote Sensing of Environment.Michigan, Ann Arbor: Enviromental Research Institute, 1969: 1017-1028.
[4]Polcyn F C, Lyzenga D R.Calculation of water depthfrom ERTS-MSS data[C]//Proceedings Symposium on Significant Results Obtained from ERTS-1.Washington:NASA 1973: 1433-1436.
[5]Tanis F J, Hallada W A.Evaluation of landsat thematic mapper data for shallow water bathymetry[C]//Proceeding of 18th International Symposium on Remote Sensing of Environment.Michigan, Ann Arbor: Enviromental Research Institute, 1984: 629-643.
[6]Tanis F J, Byrne H J.Optimization of multispectral sensors for bathymetry applications[C]//Proceeding of 19th International Symposium on Remote Sensing of Environment.Michigan, Ann Arbor: Enviromental Research Institute, 1985: 865-874.
[7]Jupp D L B, et al.Remote sensing for planning and managing the Great Barrier Reef of Australia[J].Photogrammetria, 1985, 40: 21-42.
[8]Clark R K, Fay T H.Thematic mapper band selection for bathymetric measurements[J].Ocean Optics X,1990, 1302: 630-640.
[9]Lafon V, Froidefond J M, Lahet F, et al.SPOT shallow water bathymetry of a moderately turbid tidal inlet based on field measurements[J].Remote Sensing of Environment, 2002, 81: 136-148.
[10]平仲良.可见光遥感测深的数学模型[J].海洋与湖沼, 1982, 13(3): 225- 229.
[11]张鹰.水深方法遥感研究[J].河海大学学报, 1998,26(6): 68-72.
[12]党福星, 丁谦.多光谱浅海水深提取方法研究[J].国土资源遥感, 2001, 4: 53-58.
[13]党福星, 丁谦.利用多波段卫星数据进行浅海水深反演方法研究[J].海洋通报, 2003, 22(3): 55-59.
[14]王艳娇.基于悬浮泥沙影响的水深遥感方法研究[D].南京: 南京师范大学, 2006.
[15]刘善伟.浅海水深遥感反演与海岸线判绘方法及其系统集成研究[D].北京: 中国科学院研究生院, 2011.
[16]杨哲海, 李之歆, 韩建峰, 等.高光谱中的Hughes现象与低通滤波器的运用[J].测绘学院学报, 2004,21(4): 253-258.