电磁气门发动机的活塞位移计算
2015-12-14魏毅立周金生张自雷田春雨
魏毅立,周金生,张自雷,田春雨
(内蒙古科技大学信息工程学院,内蒙古 包头 014010)
电磁气门发动机的活塞位移计算
魏毅立,周金生,张自雷,田春雨
(内蒙古科技大学信息工程学院,内蒙古 包头 014010)
由于活塞位移是曲轴转角的非线性函数,在DSP控制器中不易实现在线实时计算,不利于对气门及时、准确地控制。为此,对活塞位移与曲轴转角的非线性关系进行傅里叶展开分析,推出一个简化的位移计算式来替代原有的复杂非线性位移计算,用Matlab对误差进行仿真分析,并成功应用于二冲程电磁气门气动发动机控制系统。实验表明:采用该近似计算,误差可以控制在要求的范围内,发动机能够平稳、可控、高效地运行。
电磁气门配气;活塞位移计算;傅里叶展开;误差分析
0 引 言
常规的机械式气门凸轮配气机构经过一百多年的实践考验,证明工作可靠,因而至今仍广泛应用,但因这种机构具有不变的配气正时和不变的气门升程,不能灵活控制配气、优化工作过程。无凸轮轴电磁气门控制系统取消了传统发动机气门机构中的凸轮轴及其机器从动件,而直接以电磁方式驱动气门[1-2]。
电磁气门发动机设有电控单元,以检测发动机的工况,接受和处理传感器信号,并控制气门的开通与关断,由于系统调节不受凸轮轴的制约,结构简单,响应速度快[3-4],气门参数可按照工况的变化灵活调节。另外,电磁气门通过准确开通与关断部分气缸的气门,优化配气并且减少残余废气[5-6],控制气动发动机的输出功率。但是,无凸轮轴电磁气门控制的重要问题就是需要对活塞的位置进行准确检测,及时控制进气门和排气门的开通与关断[7]。由于活塞在气缸中做高速运动,很难直接检测活塞位移,本文在发动机外部曲轴上安装角位置传感器,通过角位置传感器测得的曲轴转角,间接测量活塞位移;并对活塞位移与曲轴转角的非线性关系进行分析,推出一个简化的位移计算式来替代原有的复杂非线性位移计算[8]。
1 电磁气门控制系统
电磁气门控制系统示意图如图1所示,主要由进气电磁气门、排气电磁气门、气缸、活塞、连杆、曲轴、曲轴角位置传感器、控制器组成。其中控制器采用数字信号处理器(DSP),其最大的特点是程序运算处理速度快[9],符合电磁气门控制系统的需求。曲轴角位置传感器采用绝对式光电编码器,绝对式编码器在一个检测周期内对不同的角度有不同的角度值,因此编码器输出的位置数据是唯一的,因使用机械连接的方式,它无需记忆,无需找参考点,在掉电时编码器的位置不会改变,上电后立即可以取得当前位置数据,可测出曲轴角的当前位置。

图1 电磁气门控制系统示意图
以二冲程气动发动机为例,电磁气门控制系统的基本工作过程为:DSP根据曲轴角位置传感器反馈来的信号,当活塞位于上止点时,控制进气电磁气门开通一定的角度,使气体进入到发动机气缸内,推动活塞下行到一定的位移,关断进气电磁气门;当进气和排气电磁气门全部关断时,气体在气缸中做绝热膨胀;DSP再根据曲轴角位置传感器反馈来的信号,当活塞将要到达下止点时,控制排气电磁阀开通到上止点,使气体排出气缸,完成一个周期的换气工作,这样与活塞相连的曲柄连杆机构带动曲轴进行旋转,输出机械能。整个过程中DSP要不断地读取曲轴位置传感器反馈来的信号,对活塞的实际位置进行分析计算,以控制电磁气门的开通角度和关断角度,使发动机能平稳、可控、高效地运行。
2 活塞位移的计算
2.1活塞位移的数学分析
在常用的中心曲柄连杆机构ABO中(见图2),活塞A作往复直线运动,曲柄OB作旋转运动,而连杆AB作平面运动。活塞位移x的曲柄转角表达式为

图2 中心曲柄连杆机构简图

式中:r——曲柄半径;
φ——曲柄转角;
λ——曲柄连杆比,λ=r/l;
l——连杆长度。
(2)该支承辊剥落块中碳元素含量较标准值偏低,不满足标准要求,含碳量的适当降低,可以通过采用合理的热处理工艺来提高支承辊的综合使用性能,但不是导致辊面剥落掉快的主要原因。
2.2傅里叶展开
式(1)中,活塞位移x是曲柄转角φ的2π周期连续函数,并满足收敛定理,可以对x进行傅里叶展开,又因为活塞位移x是曲柄转角φ的偶函数,所以展开的傅里叶级数为余弦级数,即

2.3活塞位移近似计算
1)忽略2次及以上谐波的活塞位移近似计算,只考虑含有基波分量和平均值时,式(2)可表达为

活塞位移x与x1的误差Δx1为

2)忽略k+1次及以上谐波的活塞位移近似值xk的表达式为

活塞位移x与xk的误差Δxk为

3)误差极值可由其导数为0求得:

3 活塞位移的实例计算
以某型柴油机为例,曲柄半径r=52.5 mm;连杆长度l=160.6mm,根据以上数据代入式(1)求得其活塞位移:

根据式(2)和上式求得傅里叶系数a0=113.9mm;a1=-52.5 mm;a2=-4.4 mm;a3=1.780 8×10-5mm;a4=9.528×10-2mm。傅里叶系数的谱图如图3所示,由图可知a3以后的傅里叶系数几乎为0。

图3 傅里叶系数谱图
3.2忽略2次及以上谐波的活塞位移近似计算
把a0和a1的值带入式(3)得忽略2次及以上谐波的活塞位移近似值x1:

将x与x1在同一坐标系下进行Matlab仿真,结果如图4所示。
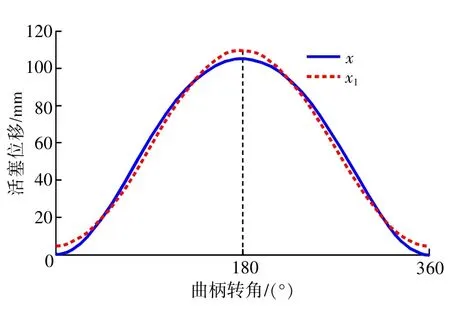
图4 x及x1的Matlab仿真曲线
由图可见,x1与x很近似。把式(8)、式(9)代入式(4),可以求得活塞位移与其近似值的误差Δx1:

活塞位移误差值Δx1在Matlab中仿真结果如图5所示。

图5 误差值Δx1的Matlab仿真曲线
根据式(7)求得Δx1的最大值为4.38 mm,最小值为-4.45 mm,取它们绝对值的最大值得最大误差为4.45mm,占活塞最大行程2r的4.24%。
3.3忽略3次及以上谐波的活塞位移近似计算
把a0、a1、a2的值代入式(5)可得忽略3次及以上谐波的活塞位移近似值x2:

将x及x2的曲线在同一坐标系下进行Matlab仿真,得出仿真曲线如图6所示。
由图可以看到,x与x2的曲线基本重合,说明x2非常接近x。把式(8)、式(11)代入式(6)得x与x2的误差Δx2:

活塞位移误差值Δx2在Matlab中的仿真曲线如图7所示。
根据式(12)得出Δx2的3个极值:-0.05 mm,-0.099 mm,-0.023 mm,取其绝对值的最大值得最大误差为0.099mm,占活塞最大行程2r的0.09%,可见x几乎可以由x2代替。
4 二冲程电磁气门气动发动机实验及结果
利用四缸四冲程柴油机,取消其凸轮轴、气门座,在主轴上连有绝对光电编码器用于曲轴转角检测,DSP采用F2812,在柴油机机体上加电磁气门,成为电磁气门气动发动机。把1#、4#缸并联,2#、3#缸并联,实现二冲程运行,发动机进气来自于压缩空气储气罐,发动机排气排入大气。通过DSP控制器调节进气电磁气门的开通角度,可以控制活塞进气位移,从而控制气缸的进气量,来控制发动机的转速及输出功率。实验中,应用活塞位移近似计算,DSP控制器通过绝对光电编码器实时检测曲柄转角,由实时检测到的曲柄转角经过活塞位移近似计算,得出活塞位移状态,及时控制进气、排气电磁气门的开通与关断,实现可变气门控制。实验结果如图8所示,压缩空气的压力分别为0.2MPa和0.3MPa时,通过改变进气脉宽,发动机的转速可在80~240r/min任意调节,发动机运行稳定。

图6 x及x2的Matlab仿真曲线
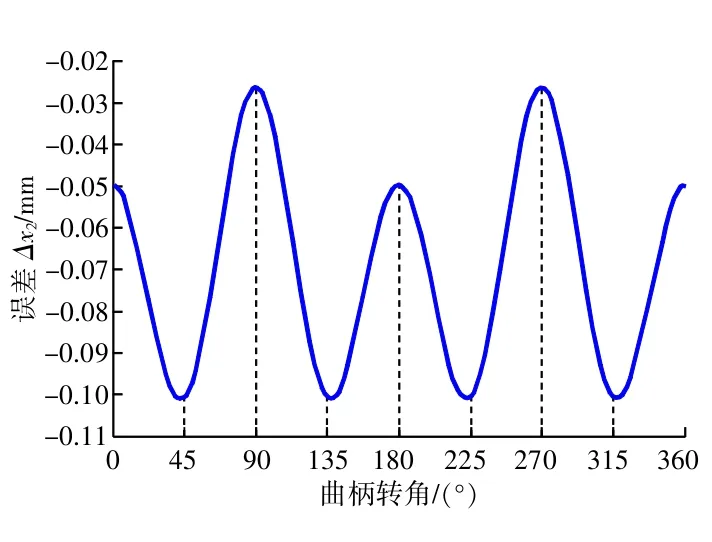
图7 误差值Δx2的Matlab仿真曲线

图8 在不同压力、不同进气脉宽下测得的转速变化曲线
5 结束语
活塞位移不易直接检测,需通过曲柄转角来检测,曲柄转角与主轴转角一致,在主轴上安装角位置传感器比较方便。活塞位移是曲柄转角的非线性函数,在DSP控制器中不易计算,由于其为周期性偶函数,它可展开为傅里叶余弦级数由于高次谐波的傅里叶系数很小,可以忽略,活塞位移可以用曲柄转角的几个低次谐波、基波以及平均值的叠加来近似计算,经Matlab对误差的分析,误差可以控制在要求的范围内。活塞位移的近似计算应用于电磁气门发动机的实验结果说明,该近似计算公式是有效的。
[1]徐涛,詹樟松,吴学松,等.可变气门升程技术现状及发展趋势[J].内燃机,2013(6):1-5.
[2]魏彦.发动机测功系统转速检测研究 [J].中国测试技术,2005,31(6):84-86.
[3]龚文资.一种新型发动机可变配气相位与气门升程机构的设计[J].中国农机化,2012,243(5):74-76.
[4]邓明阳,孙旭.发动机全可变气门升程技术现状的分析与展望[J].南通航运职业技术学院学报,2011,10(3):69-72.
[5]顾浩.发动机电磁驱动配气机构的控制技术研究[D].南京:南京理工大学,2012.
[6]Cato P A,Song H H,Kaahaaina N B,et al.Strategies forachievingresidual-efffectedhomogeneouscharge compression ignition using variable valve actuation[C]∥SAE,2005.
[7]刘镇,徐立春,石荣婷,等.电控配气柴油机性能分析研究[J].内燃机工程,2010,31(2):81-85.
[8]常思勤,刘梁,李子非,等.一种发动机电磁驱动配气机构应用研究[J].南京理工大学学报,2011,35(5):585-589.
[9]苏奎峰,吕强,常天庆,等.TMS320X281X原理及C程序开发[M].北京:北京航空航天大学出版社,2013:112-119.
Calculation of piston displacement of electromagnetic valve engines
WEI Yili,ZHOU Jinsheng,ZHANG Zilei,TIAN Chunyu
(School of Information Engineering,Inner Mongolia University of Science and Technology,Baotou 014010,China)
How to detect accurate piston positions and control valve on-off in time is one of the most important technical problems to be solved for camless electromagnetic valve engines.It is uneasy to calculate piston displacement online in real time with a digital signal processor due to the nonlinear relationship between piston displacement and crank angle.Based on the Fourier expansion,a simplified formula has been deduced to replace the available complex one.Matlab has been used to analyze the calculation errors.This method has been applied to two-stroke electromagnetic valve air-powered engine control systems.Experiments shows that,by using this approximate calculation,the errors can be reduced to a specified range to guarantee that the engine operates in a smooth,controllable and efficient manner.
electromagnetic valve valvetrain;piston displacement calculation;Fourier expansion;error analysis
A
1674-5124(2015)12-0010-04
10.11857/j.issn.1674-5124.2015.12.003
2015-07-14;
2015-09-06
内蒙古自治区应用技术与研究开发计划项目(20120309);内蒙古自治区高等学校科学研究基金资助项目(NJ06073)
魏毅立(1962-),男,内蒙古包头市人,教授,研究方向为太阳能热动力发电、电力电子、控制工程。