大型风电机组安装塔筒法兰对中系统分析
2015-12-12乐韵斐范昌龙王庆洋
文 | 乐韵斐,范昌龙,王庆洋
海上风电机组整体安装是通过起重船钢丝绳吊架系统吊起整个风电机组,然后由对中系统控制风电机组塔筒根部法兰和安装平台塔筒法兰对中,风电机组随着起重船吊钩位置下降而安放在海上安装平台上,最后用螺栓紧固,解开并拆除上部吊架系统,完成安装,如图1所示。在海上风电机组整体安装中,风电机组塔筒根部法兰与安装平台塔筒法兰的准确、高效对中直接影响到风电机组安装效率,因此,开发出一套精确高效的塔筒法兰对中控制系统具有重要现实意义。
图像识别是利用计算机对图像进行处理、分析和理解,以识别各种不同模式的目标和对像的技术,具有自动化、客观、非接触和高精度等特点。近年来图像识别技术开始应用在工程领域,在海上风电机组整体安装中,已经实现计算圆心和半径的图像处理对中控制系统,但是这种方法计算量大,对周边环境噪声敏感。本文在NIVisionAssistant机器视觉模块的基础上,开发了一套基于图像识别圆质心提取的对中控制系统,提高对中效率。
塔筒法兰对中系统原理
海上风电机组整体安装塔筒法兰对中系统主要由对中液压执行系统、对中图像采集系统和上位机LabVIEW控制界面三部分构成。
对中液压执行系统如图2所示,安装平台的左右相应位置各设置两个液压缸,液压缸的一端铰接在一起,铰接点为销孔座。另一端各自铰接在安装平台上。销孔座在两个液压缸的作用下可以在径向和切向运动并到达指定的区域。风电机组根部法兰在起重设备的适当操作下,销轴能够插进销孔座实现风电机组和安装平台的初步定位,然后由上位机控制对中液压缸带动销孔座进行精确对中,完成风电机组对中安装。
对中图像采集系统采用两个高清免驱自动调焦摄像头作为图像采集器,把摄像头USB输出口直接和路由器端口相连便可以直接在上位机通过LabVIEW编程读取相应摄像头图像,两个对中摄像头布置在塔筒法兰相隔一定距离的法兰孔中,风电机组塔筒根部法兰与塔筒法兰对中需要两个法兰平面平行并且至少两个法兰孔对中。对中图像采集系统安装结构如图3所示。在安装平台塔筒法兰孔内设置摄像头筒套,摄像头安置在套筒内,在风电机组根部待对中法兰孔内设置灯盒套筒,照明灯安装在灯盒套筒顶部,调节照明灯亮度可以得到最佳对中法兰孔成像。

图1 海上风电机组整体安装
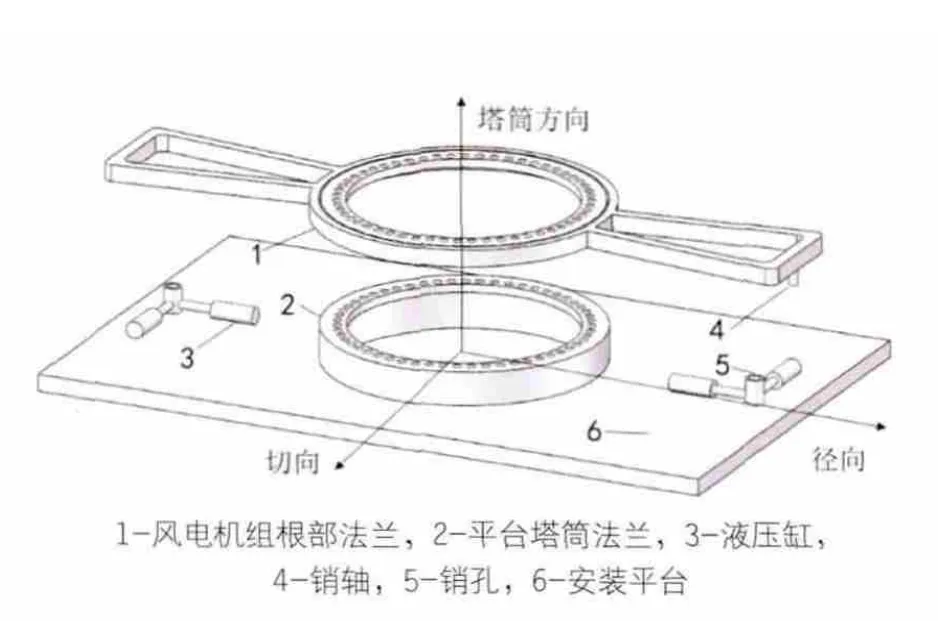
图2 对中液压执行系统
海上风电机组整体安装对中过程中,上位机发送指令控制对中液压缸动作,同时安装在塔筒法兰孔内的图像采集摄像头实时监测风电机组根部待对中法兰孔的运动情况,并且同时将采集到的图像反馈给上位机,上位机通过调用NIVisionAssistant视觉助手处理,识别并提取出风电机组根部待对中法兰孔质心,通过判断法兰对中与否,再次发送指令控制对中液压缸动作。这样通过风电机组根部待对中法兰孔图像信息反馈,不断控制对中液压缸来调整风电机组根部法兰位置,使之不断向安装平台塔筒法兰对中,对中控制流程如图4所示。
使用NIVision Assistant对对中图像的识别处理
取对中过程中经一路摄像头采集回来的一幅原始图像分析,如图5(a)所示,使用NIVisionAssistant视觉助手对这幅图像进行识别处理。从摄像头获取的原始图像是一副彩色图像,图像处理之前需要进行颜色模型转换,HSL亮度平面模型是常用的图像处理颜色模型,可以把原始的彩色图像转换为亮度图像,以便后续处理,颜色模型转换后的图像如图5(b)所示。由于对中过程图像较暗导致风电机组根部待对中法兰孔与其他部分区分不明显,可以使用查找表功能函数处理,在降低了图像的亮度、减少了暗区的对比度的同时增加了亮区的对比度,从而突出风电机组根部待对中法兰孔以便后续处理,处理后的对中图像如图5(c)所示。在对图像特征做统计分析之前必须对图像分割,把图像分成若干个特定的、具有独特性质的区域,提取出感兴趣目标。通过图像分割可以提取出风电机组根部待对中法兰孔,处理后的对中图像如图5(d)所示。为了消除对中图像噪声粒子之间的小间隙,扩展目标点的轮廓,需要进行图像基本形态处理,处理后的对中图像如图5(e)所示。由上述处理后,对中图像视野中仅剩下较大的风电机组根部待对中法兰孔和由于照明原因所形成的外围一圈亮斑圆环,可以使用高级形态处理消除外围亮斑,处理后的对中图像如图5(f)所示。最后对图像处理做出统计,得到所识别的风电机组根部待对中法兰孔个数以及质心坐标。

图3 对中图像采集系统安装结构

图4 对中控制流程图

图5 NIVision Assistant图像处理演示图
使用NIVisionAssistant对对中图像处理的程序流程如图6所示。
对中结果分析
海上风电机组整体安装对中过程中,上位机程序不断记录对中摄像头视野中风电机组根部待对中法兰孔质心坐标,取其中一路摄像头图像数据做对中全过程分析,质心坐标数据如表1所示,进而可以得到风电机组根部待对中法兰孔质心运动轨迹,如图7所示。
经过处理后的对中图像在计算机中其实是个一维矩阵,这里的质心坐标代表风电机组根部待对中法兰孔质心在摄像头图像矩阵中的坐标位置。在对中安装之前,必须提前进行标定,把安装平台上固定不动的塔筒法兰孔坐标标定出来,以便对中过程做控制参考。把风电机组根部待对中法兰孔质心坐标和标定的塔筒法兰孔坐标比较,就可以实时清晰地观察对中过程中待对中法兰孔与标定法兰孔的实时位置,如图8所示。
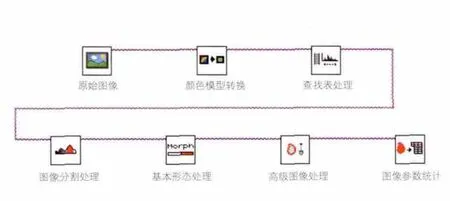
图6 NIVision Assistant图像处理流程

表1 对中全过程风电机组根部待对中法兰孔质心坐标

图7 待对中法兰孔质心运动轨迹

图8 待对中法兰孔与标定法兰孔实时位置
从对中结果中可以看到,运用图像识别提取风电机组根部待对中法兰孔质心,可以很清晰的掌握与控制风电机组整体安装对中过程,可以更精确高效指导风电机组安装,提高安装效率。
结语
海上风电的迅猛发展势必会对风电机组的安装提出更高要求,本文阐述的图像识别提取风电机组根部待对中法兰孔质心的对中方法,是图像处理在工程领域的新应用,清晰、精确、高效率的指导和控制海上风电机组整体安装,为大型风电机组整体安装提供了新方案。