GPS-RTK三维水下地形测量的应用与误差分析
2015-12-12郑伟李炜
郑伟,李炜
(中交广州航道局有限公司,广东 广州 510221)
0 引言
港珠澳大桥沉管隧道工程的主要工序有基槽精挖、碎石整平、管节沉放等,各工序之间衔接紧密,质量要求高,水下地形测量必须实现高精度、高效率、高标准才能满足各工序的顺利开展,因此打破传统的测量模式,应用GPS-RTK三维水下高精度地形测量势在必行。
1 GPS-RTK三维水下地形测量技术的基本原理
GPS-RTK三维水下地形测量是利用RTK高精度的三维坐标配合测深仪实时完成水下地形测量的过程,其基本原理如图1所示。
假设船舶静止在水面上,H为大地高,L为RTK天线到水面的高度,d为换能器到水面的距离(静吃水),T为船舶静态水面到当地基准面的距离(潮位),S为换能器到泥面的距离,§为当地基准面到WGS84椭球面的距离,h为当地基准面下的地形高程或水深。
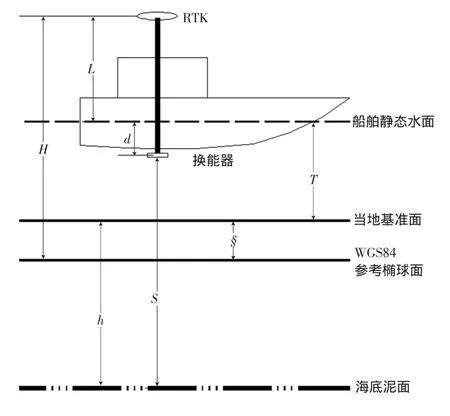
图1 GPS-RTK三维水下地形测量的基本原理图Fig.1 Basic principlesof GPS-RTK three-dimensional underwater topographic survey
由图1可以得到以下三个关系式:

若当地基准面为85高程基准面时,§即为高程异常,此时H-§=H85高程。
由式(3)转换得到:

此时S由测深仪实时测得水深,d+L为固定值(钢卷尺丈量),若RTK实时采集到85高程,便可实时测得水下85高程地形数据。
2 实际应用与实施
由以上公式及原理,港珠澳大桥岛隧工程主要采用单波束和多波束测量两种模式,采用双频测深仪(ODOM)和R2Sonic2024采集器,辅助设备有声速剖面仪、运动传感器、罗经、GPS-RTK及相关设备和数据采集软件[1-3]。在此主要阐述Trimble GPS-RTK配合ODOM双频测深仪及国际常用的海洋调查和航道测量HYPACK数据采集软件在工程中的应用。
2.1 外业数据采集
在测量前进行仪器安装与调试,包括丈量换能器吃水(d)及RTK天线高(L),进行海水声速剖面测量,各测量设备添加驱动及设备连接,进行Hypack软件中各参数设置及通讯测试等。港珠澳大桥所在区域采用BJ54坐标系和TCS2010坐标系及BCS坐标系,采用85高程系统。软件各参数设置主要关键操作如下:
1)Hypack软件椭球参数设置,椭球转换参数将GPS大地坐标转换到当地坐标系;正高改正值将大地高转换为本工程所需的85高程即高程异常值(§)。
2) RTK天线高改正值(L)设置,其目的是为了实时计算出85高程基准面以上海水面变化值,也即潮位变化;GPS时间延迟的时间改正值设置,是为了修正由测量船前进速度导致的GPS-RTK时间延迟造成坐标定位差异。
3)各设备的同步时间设置,一般选择计算机时间同步于各设备时间,也就是各设备采集的数据以传输计算机时间作为标准,自动匹配GPS坐标信息和ODOM测深信息;或是选择同步于RTK时间(RTK时间将自动修改电脑时间为RTK时间),意义同上,给各设备传输数据一个共同的时间匹配平台。
4)船舶的姿态修正及导航由GPS-RTK完成,ODOM水深数据采集及其他设备设置在此不再赘述。各设备测试通讯完毕后,进行外业数据采集及存储。
2.2 内业编辑处理
根据采集回来的外业数据进行内业处理。Hypack软件导入外业采集的原始数据,注意声速文件的配置及表面声速的设置;RTK Tide Method的平均周期设置以消除波浪的周期影响;经过内业数据处理输出满足工程施工需要的水下数据及图形文件。
2.3 成果精度分析
通过上述外业设置、数据采集及内业设置、数据编辑处理,完成了GPS-RTK三维水下地形测量的实施及实际操作应用,下面将对以上实施过程中各环节所产生的误差及原因进行分析,并提出相应的对策与建议,以不断提高水下地形测量精度。
3 RTK精度?误差的影响特性及原因分析
在进行RTK三维水下地形测量实施过程中,根据船舶运动姿态的修正关系及各参数设置,主要产生平面精度和水深高程精度的误差。误差根源受到外部作业环境、设备精度和软件内部协同、人为操作、内业处理等多重因素影响[4]。影响测量精度的误差特性可归纳为以下因素。
3.1 物理丈量
对于海上测量,海平面受风浪影响,很难确定一个标准平静的海面,此时用钢尺丈量RTK天线到水面的距离(L)及测深仪吃水改正数(d)的精确距离,很难正确丈量,将影响测深仪和RTK的高程测量精度。
3.2 船舶姿态
当进行外业作业时,海上无风三尺浪,测量船舶并非如履平地。受风、浪、流的影响,测量船舶将产生纵摇、横摇及艏摇,船舶姿态的不同将造成测量数据在三维坐标系中的测量误差。
对于测量船姿态的影响,根据图1,设船舶的姿态倾斜角度为α,RTK天线到探头的距离为N,测深仪测深为S,则测深时垂直方向的误差为:△L=N×(1-cosα),△S=S×(1-cosα);平面定位产生的中误差为:M△p=N×sinα(α随机分布)。
一般双频测深仪的换能器波束角≤8°,船舶姿态摇摆超过4°时,换能器将接收不到回波信号。若船舶姿态倾角α为3°,N为4 m,S为50 m时,计算得:
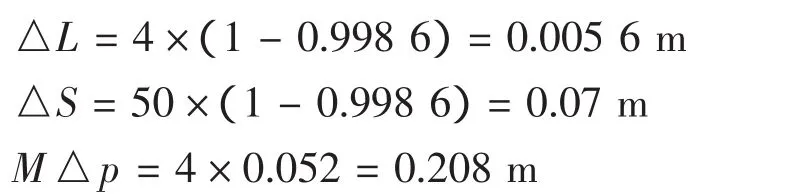
以上是测量数据在三维坐标系中产生的精度误差。
3.3 时间延迟
由于船舶动态运动,导致各设备传输过程中的时间延迟,RTK输出三维坐标的频率为每秒10组三维信息。以RTK输出三维坐标时间延迟0.1 s,船舶航速以5 kn为例,将产生约0.257 m定位误差(1.852 km/h×5×0.1 s=0.257m)。
3.4 人为操作
各设备的同步时间设置,若GPS—RTK与电脑时间不同步,此时GPS-RTK外业测量若勾选了时间不同步时使用UTC时间,GGA及位置坐标信息将以UTC时间与测深仪数据信息传入计算机时间相匹配,此时若计算机时间和UTC时间存在5 s的时差,将造成坐标位置与水深高程因时间不匹配的信息偏移,导致三维信息错乱,严重影响数据三维质量。
3.5 声速剖面
由于海水受温度和盐度的影响,声速在海水中的传播速度也随之变化。岛隧工程项目工期长,随着季节的变化及基槽深度的增加,表面声速变化且海水各层声速也随着海水温度和盐度的变化呈分层现象。双频测深仪ODOM输出水深数据信息的频率为每秒1~20次,若ODOM以1 500 m/s的声速发射,海水深度为40m,则测深仪接收到一个地形回波信号大概需要0.053 s,如声速变为1 510 m/s,将产生测距误差0.53 m,由此造成地形高程误差。
3.6 RTK潮位周期
船舶测量作业时,受波浪影响,特别是测量船长小于波浪波长时,由公式(2)得出的T就受到波峰波谷的影响较大,并且伴随着有效浪高的影响,公式(3)计算出的h就受到很大的影响,三维水下地形精度就得不到保障。
3.7 高程异常
由于受椭球曲率半径及重力场的差异影响,造成参考椭球面和似大地水准面不重合,并随着距离RTK基准站的差异而变化。由于本工程施工区域狭长,高程异常变化将影响公式(2)中的85高程基准面以上的水面变化(即85高程潮位)和公式(3)中h的精度。
4 提高RTK三维地形测量精度的对策
对RTK三维水下地形测量的影响因素进行了分析,为提高水下地形测量精度,提出改进和应对策略如下。
1) 为消除波浪对丈量精度及视觉误差的影响,如图1所示,公式(3)中的d+L为固定值,因此建议用钢尺直接丈量RTK天线到测深仪换能器的整体距离N,测深仪吃水改正数为d,直接计算出L=N-d,由此可以看出不影响测量水深h,可以提高高程精度。
2) 波浪引起的垂直变化,根据图1和公式(3)的分析,在大地高H和测深S中可以互相抵消,所以该项误差在RTK水深测量中可以忽略。由横摇造成的水深S误差可以通过运动传感器加以补偿和消除。测量船舶尽量垂直波浪方向前进,以减弱或消除平面误差。
3) 正确计算GPS延迟时间,提高GPS与水深数据的匹配精度,减小位置偏差。正确使用Hypack软件及各设备时间同步的设置,避免出现严重三维数据质量偏差。使用声速剖面仪精确计算出各层海水声波的传播速度,在内业处理过程中对声速加以改正,提高RTK三维水下地形测量的三维精度。
4) 通过现场水文观测站,实时记录海浪实况,统计测量时段、风速、流速、流向、浮标海浪有效波高及周期,在内业处理过程中,RTK潮位采用波浪半周期的整数倍,以消除或减弱波浪对公式(2)中T的影响,提高水下地形测量的三维精度。
5) 由于施工区域狭长[5],高程异常变化将影响公式(2)中的85高程基准面以上的水面变化(即85高程潮位)和公式(3)中h的高程精度。由于异常值变化明显,需要通过分区域进行确定,将岛隧工程施工区域划分为7个1 000m×500m的长方形区域,根据方格区域内的测点分别求得每一个区域内的高程异常值,区域划分如图2所示。单基站RTK作业时,将测量区域分区进行高程异常改正。
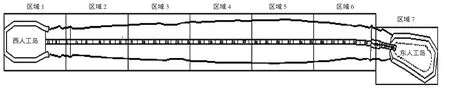
图2 高程异常分区图Fig.2 Testing area division of theelevation anomaly
目前,港珠澳大桥管理局测控中心已经完成GPS首级平面控制和水准测量并建立HZMBCORS系统,高程异常值通过CORS系统提供的85高程值和大地高的差值获得,将图2中每个区域内测试得到的各点高程异常值取平均作为这个区域的高程异常值,如表1,可见高程异常接近线性变化,最大-3.78 m,最小-3.51 m,水深测量时进行分区域修正高程异常值。
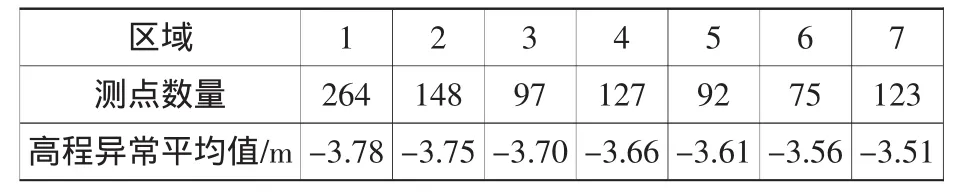
表1 岛隧工程各区域高程异常值Table 1 Each regionalelevation anomaly valueof the island and tunnelproject
港珠澳大桥岛隧工程在东、西人工岛设置了RTK单基站,同时也开启了HZMB-CORS系统定位,两套系统保证了RTK测量作业时定位系统的稳定性,为实现高精度、高效率、高标准的水下地形测量提供了保障,为各工序顺利衔接、施工高效有序提供了保证。
5 结语
通过对RTK三维水下地形测量在港珠澳大桥岛隧工程的应用及实施中产生误差的原因和特性进行分析,提高了水下地形测量精度,保证了各工序顺利衔接,施工高效有序进行,为以后更好地提高水深测量精度和推广GPS-RTK三维水下地形测量技术奠定了基础。
[1]上海航道局.HYPACKMAX测量和疏浚软件的应用手册[K].2003.CCCC Shanghai Dredging Co.,Ltd.Application manual of measurementand dredging software HYPACKMAX[K].2003.
[2] 丁树友,田俊峰.国际水道测量软件的最新技术进展[J].中国港湾建设,2007(2):19-22.DING Shu-you,TIAN Jun-feng.New technical development of internationalwaterway survey software[J].ChinaHarbour Engineering,2007(2):19-22.
[3] 徐绍铨.GPS测量原理与应用[M].武汉:武汉测绘科技大学出版社,1998.XU Shao-quan.Measuring principle and application of GPS[M].Wuhan:Wuhan Technical University of Surveying and Mapping Press,1998.
[4] 谢世杰,奚有根.RTK特点与误差分析[J].测绘工程,2002(2):34-37.XIE Shi-jie,XI You-gen.Characteristics and error analysis of RTK[J].EngineeringofSurveyingand Mapping,2002(2):34-37.
[5]中交股份联合体港珠澳大桥岛隧工程第Ⅳ工区项目经理部.港珠澳大桥岛隧工程沉管隧道基槽深水精确地形测量关键技术方案[R].2011.ProjectManagement Dept.ofWork AreaⅣfor Island and Tunnel ProjectofHongkong-Zhuhai-Macao Bridge JointVenture ofChina CommunicationsConstruction Co.,Ltd.Key technology programsof precise topographic survey in deepwater of immersed tunnel base slotof the Hongkong-Zhuhai-Macao Bridge island and tunnelproject[R].2011.