激光全息干涉测物体微小位移的研究
2015-12-11邵嶽,胡杰
邵 嶽,胡 杰
(1.沈阳工业大学 电气工程学院,辽宁 沈阳 110870;2.沈阳理工大学 理学院,辽宁 沈阳 110159)
激光全息干涉测物体微小位移的研究
邵嶽1,胡杰2
(1.沈阳工业大学 电气工程学院,辽宁 沈阳 110870;2.沈阳理工大学 理学院,辽宁 沈阳 110159)
摘要:提出一种基于计算机、CCD和Image-Pro6.0软件的双曝光全息测微小位移的有效测量方法。通过CCD采集图像和Matlab软件的GUI用户界面交互功能制作实验参数可连续计算的平台。结果证明,此平台参数输入灵活,运算过程简化,运算速度加快,精确度提高。
关键词:激光全息干涉;微小位移;CCD
激光全息干涉,是利用同一光束在不同时间的波前来进行干涉,由于相干光束出自同一个系统,因而包围介质的欠缺引起的光程变化会自动消除,这种方法优于其它干涉测量法,也称为“全息干涉计量”技术。
文献[1]研究了获得激波流场的有限条纹全息干涉图,利用图象处理技术对干涉图进行了细化处理,再用人机交互的方式采集数据计算出条纹的位移量。文献[2]利用CCD及自编的图像处理软硬件来测量干涉条纹间距,从而得出复合材料的微小形变量。
本文提出一种基于计算机、CCD摄像头、视频图像采集卡、Image-Pro6.0软件测量微小位移的有效方法,使激光全息干涉微小位移测量实现光学图像数字化,以便更迅速准确地分析光学干涉图像的数据[3]。通过CCD采集图像,利用Matlab软件的GUI用户界面交互功能制作实验参数可连续计算的平台,此平台参数输入灵活,运算过程简化,运算速度快,提高了实验结果的精确度。
1 激光全息干涉理论
激光全息干涉是全息干涉计量技术中测量物体微小位移变化或形变的一种常用方法。
本文以漫反射平板(钢板尺)双曝光全息为例,说明实验过程,光路图如图1所示。由全息照相原理可知[4],第一次曝光记录的物光波
U1(x,y)=O0(x,y)exp[-jφ(x,y)]
(1)
第二次曝光记录的物光波
U2(x,y)=O0(x,y)exp{-j[φ(x,y)+Δφ(x,y)]}
(2)
式中:U1、U2分别为两次曝光的物光波函数;O0为物光波振幅;φ为物光波的相位;j为复函数的虚部;Δφ为相位差。
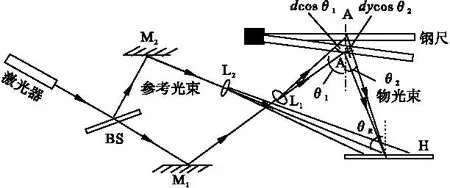
M1、M2为全反射镜;L1、L2为扩束镜;BS为分束镜
经两次曝光的全息图,用原参考光照射,既再现出两个原物光波,再现波的复振幅将和两次曝光的物光波的和成正比,其光强分布为
I(x,y)=|U1(x,y)+U2(x,y)|2
=|O0exp[-jφ(x,y)]+O0(x,y)exp{-j[φ(x,y)+Δφ(x,y)]}|2

(3)
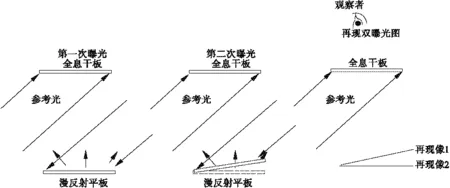
图2 漫反射平板旋转的双曝光全息图

由式(3)可知,在条纹定义域面上出现暗条纹的位置为

(4)

(5)

(6)
式中,k表示从零位移(固定点)算起的暗条纹序数;dy为微小位移。由式(6)可知
(7)
2 实验
2.1 角度测量
根据式(7),计算微小位移需要知道物光波入射角θ1和散射角θ2。以往角度测量一般使用量角器,测量精度低,数据不确定度较大。本文利用计算机、CCD、白屏和Image-Pro6.0软件进行角度测量,提高了测量结果准确度,测量装置如图3所示。
测量步骤如下:
(1)双曝光全息图获取后,将载有实验白板的元件移入,与待测物(钢板尺)平面重合;
(2)将CCD移入上方,对准映有两条光线的白板,调焦直至电脑屏幕上两条光线清晰可见;
(3)调用Image-Pro6.0软件中的库函数[6],即可快速知道入射光和散射光与法线的夹角,即θ1、θ2。如图4所示。

图3 利用CCD采集激光夹角的实物图
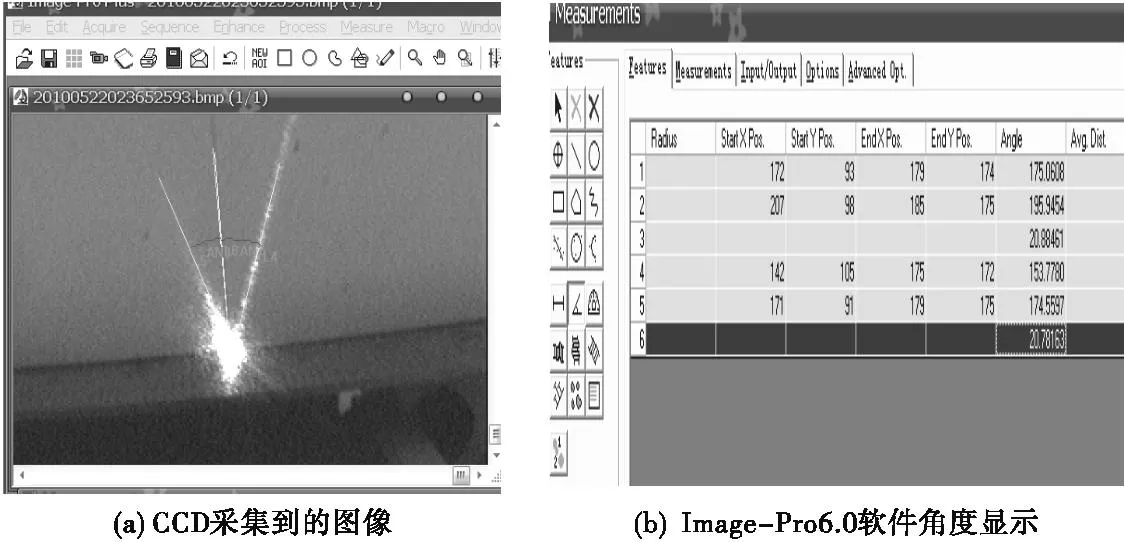
图4 角度测量
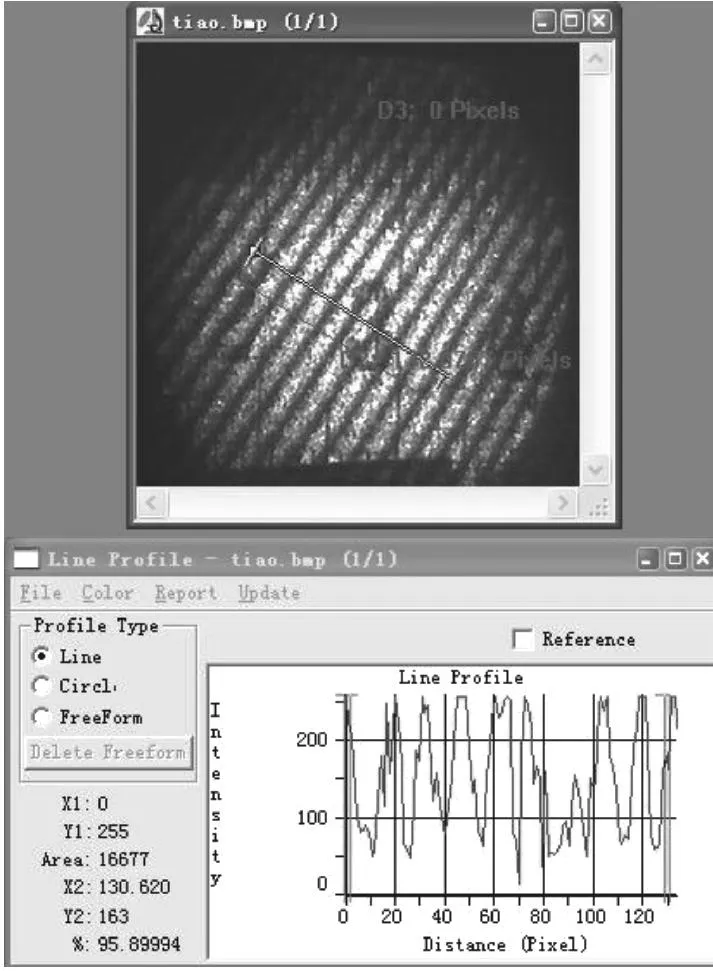
图5 Image-Pro6.0测量条纹间距图
2.2 条纹间距测量
双曝光全息图获取后,用CCD采集干涉图像,记录条纹序数,测量条纹间距,如图5所示。若CCD测的条纹间距为x′,条纹实际间距为x,二者的关系可表示为
x=βx′
(8)

(9)
通过式(8)和式(9),即可求出条纹的实际间距,再由式(7)求得待测物体的位移量,同时,可直观分析条纹间距与形变大小之间的关系及准确的记录条纹的序数k,如图5所示。再调用Image-Pro6.0软件中的测量函数库,找到测量工具模块,量出距离x′,求得x。
2.3 数据处理
首先编写GUI设计及.M文件代码。根据设计步骤,建立坐标轴对象、按钮、面板及静态文本标签等,并使用几何位置排列工具进行调整。在编辑器中布置控件,坐标轴Axes 1 用来显示实验光路图,Axes 2 用来显示实验照片,Axes3 用来显示图像的均化分析,图文本框用来输入相应的参数,再设置控件的String和Tag等相关属性,以便编辑、记忆和维护。
根据参数变化,设置相应的默认值,程序如下
set(handles.lam_edit1,′String′,632.8e-6);
set(handles.k_edit2,′String′,12);
set(handles.theta1_edit3,′String′,45);
set(handles.theta2_edit4,′String′,0);
…………
设计界面控件的回调函数的代码,在界面中输入参数,点击界面执行按钮,得到双曝光全息图计算的GUI界面[7]。
然后调用pushbutton7_Callback(hObject,eventdata,handles)函数,执行计算。
最后调用pushbutton4_Callback(hObject,eventdata,handles)函数,结束程序关闭图形。程序完成后,运行程序的GUI界面如图6所示。

图6 GUI计算界面
3 结论
阐述激光全息干涉测量物体微小位移的方法,以双曝光测量理论为基础,利用CCD、matlab自编程序和Image-Pro6.0图像处理软件来获得待测物体在定义域范围产生的条纹序数、相干光的夹角及位移量的计算。测量结果能精确反映待测物体的变形情况,处理数据快速准确,具有实际应用价值。
参考文献:
[1]王建岗,苗兴华,王国志,等.双曝光全息干涉法用于风洞中激波流场的研究[J].光子学报,1997,26(4):373-378.
[2]俞晓磊,赵志敏,郭林峰.激光散斑干涉条纹的CCD分析技术研究[J].应用激光,2007,27(5):378-381.
[3]曹秒,刘畅,林韵,等.基于CCD成像自动对准技术的玻璃折射率测量系统研究[J].仪器仪表学报,2013,34(11):2555-2570.
[4]黄婉云,傅里叶.光学教程[M].北京:北京师范大学出版社,1986.
[5]熊秉衡,李俊昌.全息干涉计量—原理和方法[M].北京:科学出版社,2009.
[6]畅想先锋,Image-Pro6.0使用教程[DB/OL].http://wenku.it168.com/d_001178432.shtml.
[7]陈垚光,毛涛涛,王正林,等.精通MATLAB GUI 设计[M].北京:电子工业出版社,2008.
(责任编辑:赵丽琴)
Measuring Micro-displacement of the Object by Laser Holographic Interferometry
SHAO Yue1,HU Jie2
(1.College of Electrical Engineering Shenyang University of Technology,Shenyang 110870,China;
2.Shenyang Ligong University,Shenyang 100159,China)
Abstract:A measurement and calculation method of tiny displacement using double exposure hologram based on computer,CCD and Image-Pro6.0 software is peresent.Images can be collected by CCD,and the experimental parameters can be calculated continuously using GUI user interface interaction function of Matlab software platform,thus the input parameters is flexible,operation process is simplified,the operation speed is accelerated,the accuracy of the experimental results is improved.
Key words:laser holographic interferomet ry;micro-deformation;CCD
中图分类号:O438.1
文献标志码:A
文章编号:1003-1251(2015)01-0069-04
作者简介:邵嶽(1973—),男,工程师,研究方向:光电转换技术与应用.
收稿日期:2014-06-04
