利用机载LiDAR测绘大比例尺数字地形图的可行性研究
2015-12-11胡耀锋张志媛
胡耀锋,张志媛,林 鸿
(1.广州市城市规划勘测设计研究院,广东 广州510060;2.广州市规划局,广东 广州510060)
一、引 言
激光雷达技术是从20世纪中后期逐步发展起来的一门高新技术,是一项通过由传感器所发出的激光来测定传感器与目标物之间距离的主动遥感技术[1]。机载激光雷达测量技术作为一种新兴的空间对地观测技术,在多等级三维空间信息的实时获取方面取得了重大突破,引起了测绘、林业等相关行业人员的浓厚兴趣。虽然机载激光雷达无法完全取代传统的航空摄影测量作业方式,但可以预见,在未来的航空遥感领域,LiDAR将成为主流之一[2]。
美国国家宇航局(NASA)、美国地质调查局(USGS)以及美国地质学会(AASG)已经开始建设全美高分辨率激光雷达数据库。我国正处于经济高速发展的时期,国家、地方、企业生产单位迫切需要现实性强、精确度高、比例尺大的地形数据产品,满足这些要求的主要途径是采用激光雷达这一先进的测绘技术[3]。当前,在基础地形图的测绘中,LiDAR主要应用于专题和带状地形测量方面,真正用于大面积的地形图测量上还比较少。
二、LiDAR系统组成及主要误差来源
LiDAR系统主要由激光扫描系统(laser and scanning subsystem)、惯性测量装置(inertial measure unit,IMU)、GPS、监视及控制系统(operator display)组成。其中LiDAR传感器是系统的核心部件。由于这些部件高度集成,系统本身必将受到来自激光测距、姿态、飞行器位置等各种误差源的影响[4],这些误差能直接影响到激光脚点坐标的精度。机载LiDAR系统误差主要包括系统误差和偶然误差,系统误差会给激光脚点坐标带来系统偏差。主要包括:①GPS定位误差;②激光测距误差;③测角误差;④系统集成综合误差;⑤INS姿态测量误差;⑥其他误差,如搭载数码相机的LiDAR还包括相机的误差、通过不同航带获取的点云数据存在误差[5]等。GPS定位误差是目前影响机载激光雷达测量精度的最主要误差源之一,一般为厘米级到分米级[6]。
三、LiDAR测图实施及关键技术
LiDAR测图项目一般包括航外和航内作业两个步骤,航外作业包括航空权的申请、飞行前的准备、仪器检校、外业飞行、航测内业数据处理;航内作业包括内业成图、外业调绘、数据入库等环节。
1.项目概况
本项目位于广州市从化区,面积1985 km2,测区东北部以山地、丘陵为主,中南部以丘陵、谷地为主,西部以丘陵、台地为主。市内最高点海拔1210 m,最低点为海拔16.3 m。测区植被茂盛。
2.本项目使用的LiDAR设备
本项目采用的LiDAR扫描设备为德国TopoSys公司的Harrier 68i,是新一代LiDAR设备,激光扫描仪的型号为Riegl LMS-Q680;飞机采用运-5,数码相机为Rollei Metric AIC Pro65;惯导系统型号为Applanix POS/AV系列,该仪器的GPS、IMU、激光扫描仪、相机均集成在设备箱内。
3.LiDAR测图关键技术
外业航飞计划制定、GPS基站设置、参考面测量、内业成图是测图的关键,另外由于市面上还没有成熟的LiDAR地形图测制软件,软件开发也是重点。
1)飞行计划制订:包括航带划分、飞行高度、速度、激光脉冲频率、航带宽度、激光反射镜转动速度、数码相机方位元素及定位、相机拍摄时间间隔等内容。本项目分A、B两个范围设计,其中A区飞行方向为西北—东南,共布设29条航线,相对航高为1600 m;B区飞行方向为西北—东南,共布设51条航线,相对航高为900 m。
2)GPS基站设置:在地面沿航线布设一定数量GPS基准站用于动态GPS定位,保持平均间距应在30~50 km,合理布设基准站可有效减小大气误差、电离层延迟误差、对流层延迟误差、卫星钟差及轨道差等。在测区中最好也布设1~2个基准站,用于数据处理后快速检测已知点与所测点云的绝对误差。将流动站安置在飞机上,将基准站和流动站采样间隔调整一致。本项目实际架设5个基站,平均间距为24 km,分布如图1所示。
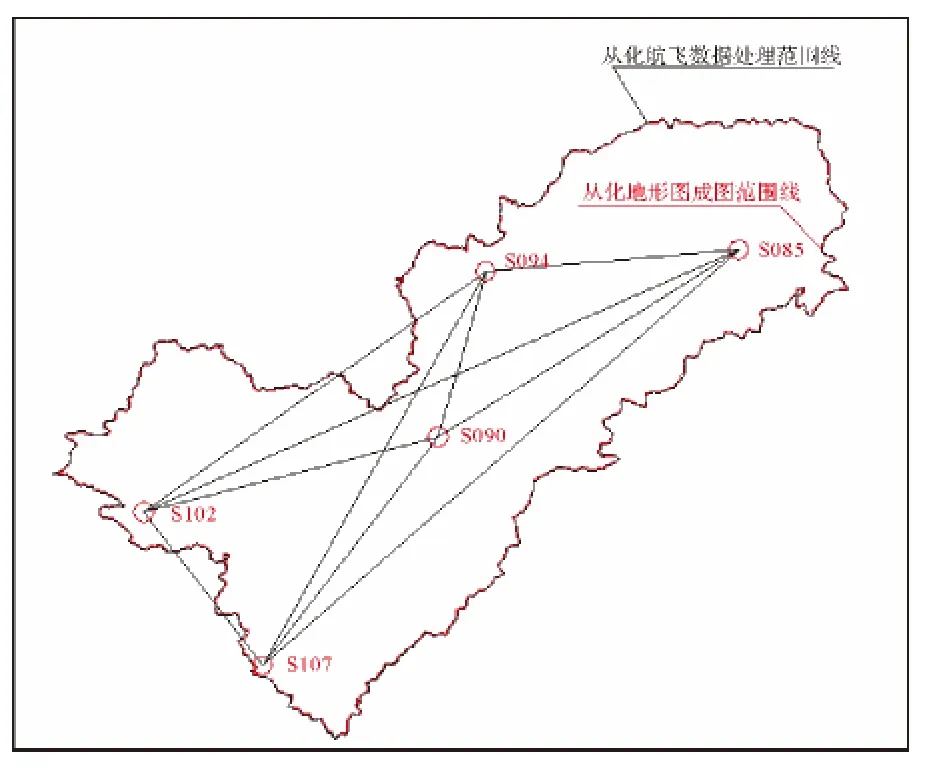
图1 GPS基站分布图
3)参考面测量:为保证数据处理的精度,消除系统误差,在测区范围内测量部分高程和平面参考数据,本测区共设计9个参考面,参考面均匀分布在测区范围内,平均间距约15 km,如图2的所示。
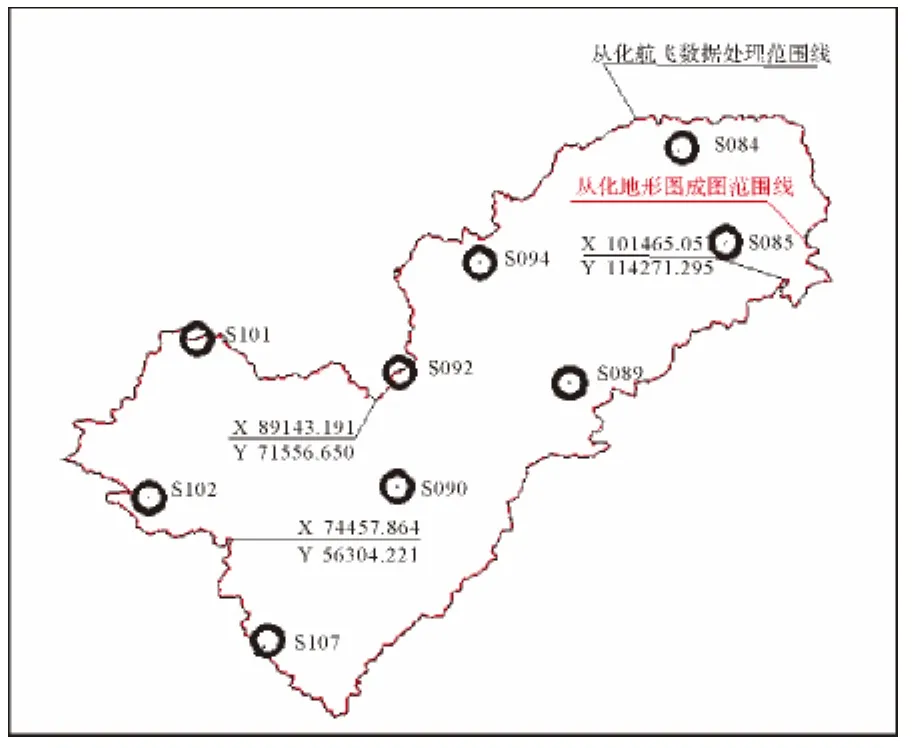
图2 参考面分布图
4)成图软件开发及内业成图。经过LiDAR航飞后,获得了数字正射影像图、点云数据(地面点与非地面点数据,COO格式)、DEM(数字高程模型)等。由于目前市面上激光点云处理软件地形图测制功能较弱,研制LiDAR测图软件也是项目的关键。针对LiDAR特点及其成果的特征,该软件主要功能应包括:地形图绘制、点云数据快速调入、点云抽稀、影像图快速调入及管理、房屋自动倾斜改正等。另外,由于本项目地面激光点密集,每平方千米约为1~4个,数据量非常庞大,利用传统建立三角网生成等高线的办法无法实施,因此,等高线大区域、快速生成也是项目的关键。本项目参考国家标准定制了地形图测制模版(包括数据标准、地形图图式等),并开发了LiDAR测图软件,解决了等高线快速生成等技术难题。在内业成图上,正射影像图中道路、水体、坎、斜坡的判读与绘制是影响地形图精度与质量的主要环节,同时,高层房屋的倾斜纠正也是项目的关键。
四、精度及植被穿透性检测
1.平面、间距及高程精度检测
本项目数学精度采用外业设站检测及内业大比例尺(1∶500)地形图精度比对两种方法进行,外业设站进行了点位平面精度检测、高程精度检测、点位间距精度检测。检测成果见表1。

表1 平坦和丘陵地貌数学精度检测表
2.植被穿透性检测
表1中检验了平坦和丘陵地貌的高程精度,这些区域大部分位于居民区内,通常无成片植被覆盖。本项目作业区中北部有2/3属于山地丘陵地貌,植被覆盖茂密,属于典型的南亚热带和热带混交林带,激光点的高程精度直接影响到地形图中高程点和等高线的精度。为了检验本项目激光扫描仪对植被的穿透情况,测试激光点在不同植被下的高程精度,制定高程改正方案,本项目选定了作业区具有代表意义的8种不同植被类型进行高程检测,如图3所示。
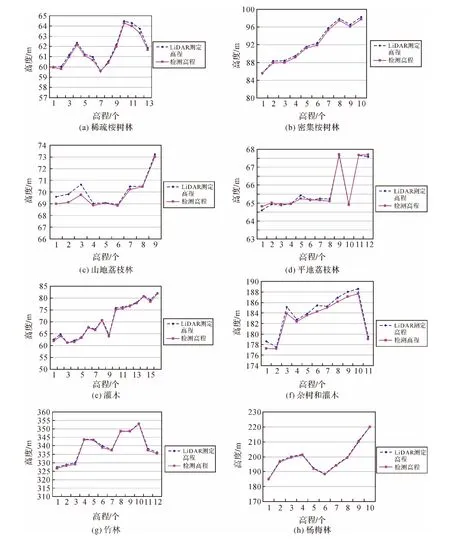
图3 典型植被高程检测对照图(虚线为LiDAR测定高程,实线为实地测量高程)
针对不同植被类型和覆盖高度,对检测点作了中误差统计,结果见表2。
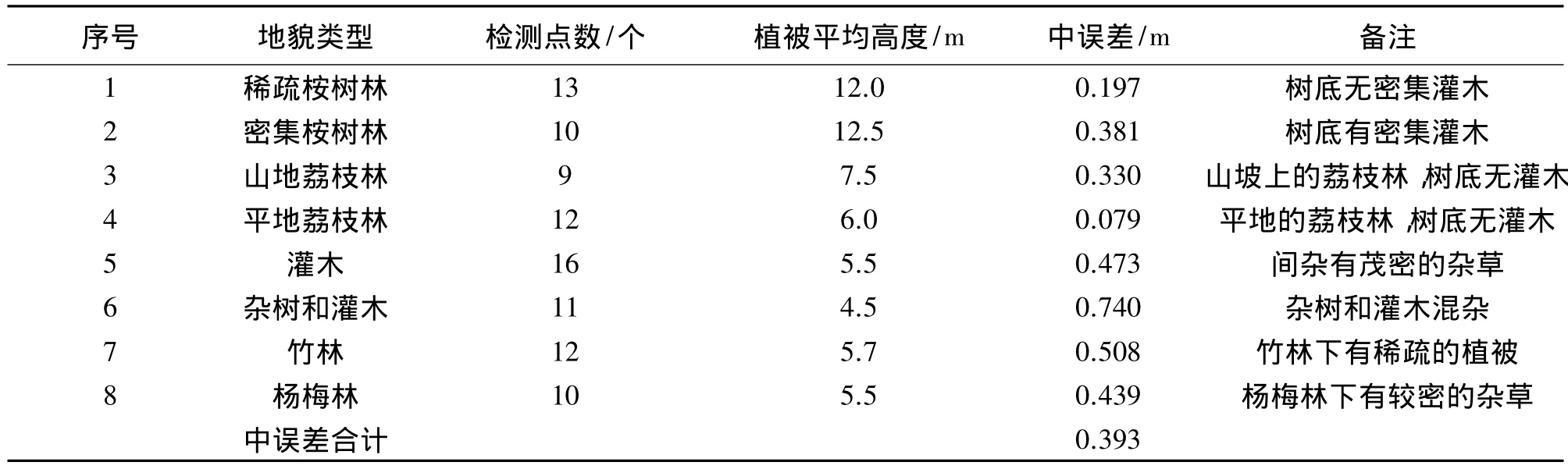
表2 山地植被高程检查表
通过对图3和表2的分析可以得出结论:①在一般情况下LiDAR航测高程大于实际检测高程,如果需要得到更高的高程精度,可以为局部地貌减去高程中误差以提高航测的精度,但是平地荔枝林地貌除外。在该地貌中共检测了12个高程点,LiDAR航测高程大于实际检测高程有7个点,中误差为-0.08,小于实际检测高程有 5个点,中误差为+0.078,高程正负相当,这与平地高程检测(见表1)的情况相类似,不能通过高程改正来提高精度。②点云分类的优劣是影响高程精度高低的主要因素。在表2中山地荔枝林的高程精度为0.33 m,平地荔枝林为0.079 m,误差相差4倍多,而实地的植被覆盖情况刚刚相反,平地荔枝林的覆盖密度要大于山地荔枝林,主要原因在点云的后继分类处理上。山地地形变化大,可供选取的分类参照点少且选取困难;平地地形变化小,可以选取树林边的道路作为参照点。分类参照点多且明显,分类的结果就会更好。
五、结 论
LiDAR系统能全天候高精度、高密集度、快速和低成本地获取地面三维数字数据,具有广泛的应用前景[7]。通过本项目实践和精度检验可以得出如下结论:
1)航高越高地面激光点的密度就越低,精度越差;反之,航高越低地面激光点的密度就越高,精度越高。降低航高将增加航飞次数及数据处理工作量,应当根据地理条件选择与测图比例相适应的航高。目前LiDAR能满足1∶5000、1∶2000甚至更大比例尺的精度要求。本项目精度满足国家相关规范要求,成果通过了国家测绘地理信息局测绘产品质量监督检验站的检测。
2)激光对植被具有一定的穿透性,植被越密集到达地面上的激光点越少,反之就越多。
3)LiDAR相对传统航空摄影测量具有极大优势。它不需要布设像控点,无须构建立体像对,采用高清晰数码相机拍摄,影像判读清晰,色彩更真实,地类分界明显,制图速度快,工艺流程与传统相比省去了胶片的冲洗和影像的扫描,减少了原始影像信息的损失[8]。本项目仅用时4个多月,成本和工期节约了30%~40%,验证了LiDAR的成图效率。
4)LiDAR的高程精度优于平面精度,这与传统的航测刚好相反,二者的结合将是以后生产1∶500甚至更大比例尺地形图的主要研究方向。
[1]赵峰,李增元,王韵晟,等.机载激光雷达(LiDAR)数据在森林资源调查中的应用综述[J].遥感信息,2008(1):106-110.
[2]吴华意,宋爱红,李新科.机载激光雷达系统的应用与数据后处理技术[J].测绘与空间地理信息,2006,29(3):58-63.
[3]宫鹏,黄华兵.激光雷达技术在我国地形测图中应用前景广阔[J].地理信息世界,2008(12):45-48.
[4]刘经南,张小红,李征航.影响机载激光扫描测高精度的系统误差分析[J].武汉大学学报:信息科学版,2002(4):111-117.
[5]王蒙,隋立春,黎恒明.机载LiDAR点云数据的航带拼接研究探讨[J].测绘通报,2010(7):5-8.
[6]张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007.
[7]李英成,文沃根,王伟.快速获取地面三维数据的Li-DAR 技术系统[J].测绘科学,2002(4):35-38.
[8]喻雄.机载激光雷达在山区高速公路勘测中的应用[J].测绘通报,2011(2):31-34.