基于单片机的转角测量系统设计
2015-12-10梁应选,杨明亮,何亚银等
基于单片机的转角测量系统设计
梁应选,杨明亮,何亚银,丁敏
(陕西理工学院 机械工程学院, 陕西 汉中 723000)
[摘要]在明确测量任务的前提下,对增量式编码器的工作原理以及对其输出信号四细分处理的方法进行研究,在此基础上利用Proteus仿真软件对旋转编码器原始信号及经过四细分处理信号进行仿真分析,为合理选择硬件电路元器件找到充分的依据。进而构建了以AT89S52单片机为主控单元,增量式编码器为前端传感器,外加中间四细分辨相处理电路,选用LCD液晶显示器显示测量结果,实现信号采集和数据处理的硬件检测系统,所构建的硬件检测系统电路结构简单、成本低。
[关键词]转角测量;单片机;仿真分析;细分;辨相
[文章编号]1673-2944(2015)03-0044-05
[中图分类号]TP212
收稿日期:2014-12-13
基金项目:陕西省教育厅科学研究计划项目(12JK0675)
作者简介:梁应选(1968—),男,陕西省大荔县人,陕西理工学院高级工程师,主要研究方向为测试技术、机电工程及自动化;杨明亮(1954—),男,陕西省富平县人,陕西理工学院教授,硕士生导师,主要研究方向为机械设计及理论、智能仪器。
滚珠丝杠螺母副是数控机床和精密机械上最常使用的传动元件,由于具有高精度、可逆性、摩擦阻力小和高效率等特点,被广泛应用于加工机床、机器人、自动控制、精密仪器等领域。滚珠螺旋传动(滚珠丝杠副)是在丝杠和螺母旋合螺旋槽放置适量的滚珠作为中间传动体,借助滚珠返回通道,构成滚珠在闭合回路中反复循环运动的螺旋运动。丝杠与螺母间的相对运动借助于滚珠链的作用由滑动摩擦变为滚动摩擦,这也是滚珠螺旋运动的最大特点。滚珠丝杠副一般是由丝杠、螺母、滚珠以及滚珠返回通道4部分组成[1],其外观如图1所示。
滚珠丝杠螺母副按循环方式分为外循环和内循环。内循环结构如图2所示。内循环均采用反相器实现滚珠循环,反相器有两种类型:一种为圆柱凸键反相器,另一种为扁圆镶块反相器。反相器镶块嵌入螺母的切槽中,用镶块的外轮廓定位。与外循环反相器比较,由于内循环反相器尺寸较小,从而减小了螺母的径向尺寸并缩短了轴向尺寸[2],因而在滚珠丝杠中被广泛使用。

图1 滚珠丝杠副

图2 内循环回珠器
内循环滚珠丝杠螺母回珠器孔的加工,一般是先加工好安装回珠器的孔,然后再加工滚珠丝杠螺母的螺旋槽[3]。加工螺旋槽时,工人无法确定螺旋槽相对回珠器孔准确的加工位置,通过试磨的方法,透过已加工的回珠器孔观察螺旋槽相对于回珠器孔的位置。回珠器孔与螺旋槽的位置度,直接影响着滚珠丝杠的性能[4],如果位置度偏差较大,钢球从螺旋槽进入回珠器或从回珠器进入螺旋槽时,钢球在过渡状态会发生一个位置突变,该突变影响滚珠丝杠运动精度;如果误差更大一些,将会产生卡滞现象。随着控制水平的提高,滚珠丝杠的运动速度要求越来越高,回珠器孔与螺旋槽的位置度是影响滚珠丝杠速度的一个重要因素。
通过对某机床有限公司的现场调研,发现目前在生产线上,还没有一种快速检测回珠器孔与螺旋槽位置度的仪器,检测手段的滞后严重影响着滚珠丝杠螺母加工的质量。针对这一现状,本文结合精密测量技术与单片机技术,着重就如何利用单片机组建数据采集和处理系统,对滚珠丝杠螺母回珠器孔从一端到另一端所转过的转角准确测量进行了研究。回珠器孔两端圆弧中心与轨道中心位置误差分析、计算另有文章论述。
由图1和图2可知,要想测出回珠器孔位置(即回珠器槽与其内部螺旋线切合度),回珠器槽一端螺旋上升到另一端时所转过的角度准确测量是必须解决的首要问题。为此,本文就转角测量单片机测量系统组建过程阐述如下。
1 测量系统的组成
测量系统的硬件结构主要由增量式编码器、四细分辨相电路、单片机系统及显示部分等硬件组成。
1.1 光电编码器的选用依据及工作原理
1.1.1 光电编码器的选用依据
由于实验室仅有型号为ISC3004-001E-360B-5E增量式编码器,且该编码器输出信号经初步分析满足测量精度要求,故选用该型号编码器作为数据采集前端部分。
1.1.2 光电编码器的工作原理
透彻理解传感器的工作原理是能否确保采集有效信号和后续四细分处理电路设计的必要条件,故将光电传感器的工作原理简单介绍如下。
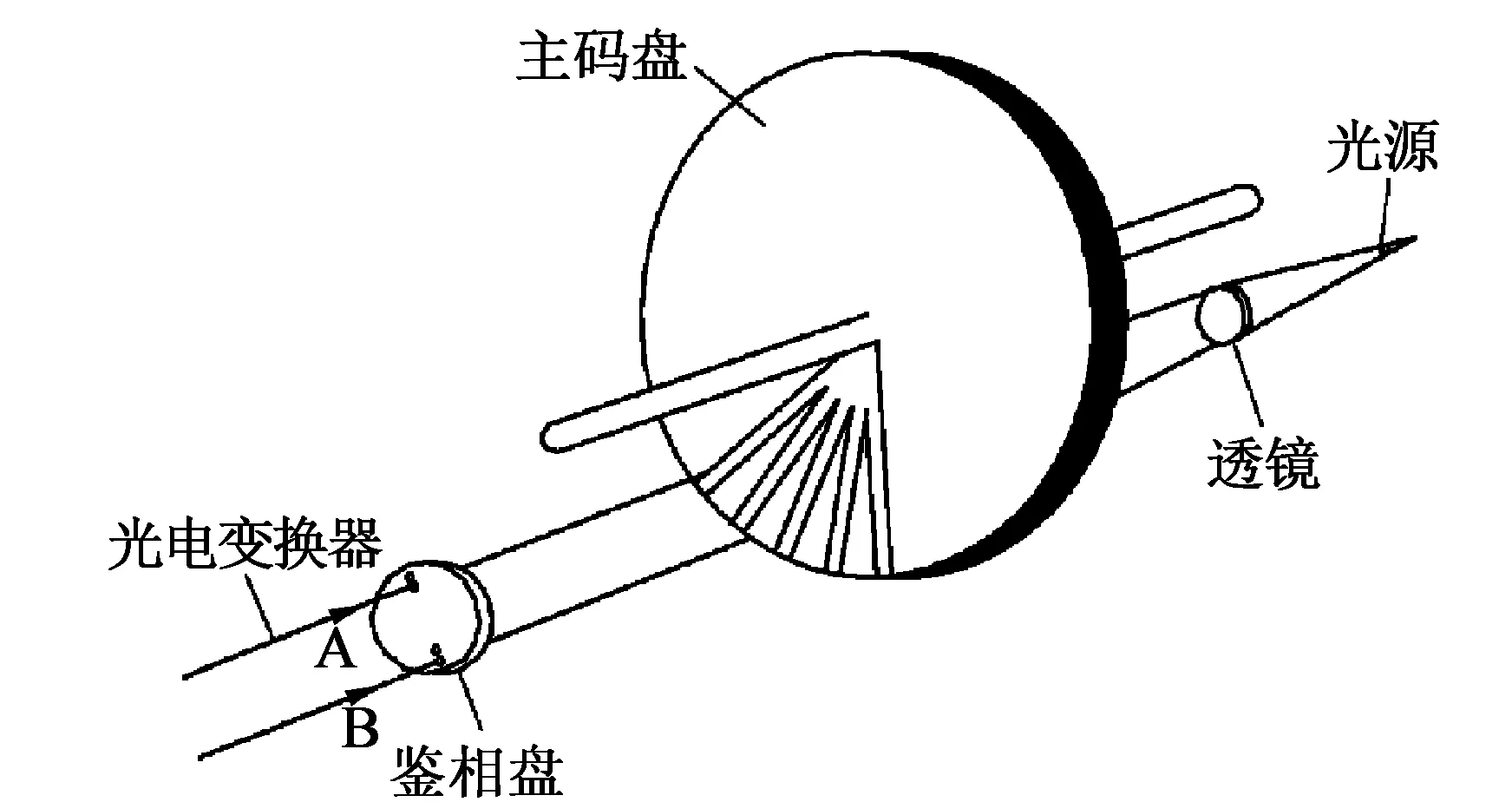
图3 增量式编码器工作原理
增量式编码器的工作原理[5]如图3所示。它由主码盘、鉴相盘、光学系统和光电变换器组成。主码盘(光电盘)周边上刻有节距相等的辐射状窄缝,形成均匀分布的透明区和不透明区。鉴相盘与编码盘平行,并刻有两组透明检测窄缝,它们彼此错开1/4节距,以使从两个光电变换器输出的信号A、B在相位上相差90度。工作时,鉴相盘静止不动,主码盘与转轴一起转动,光源发出的光投射到主码盘与鉴相盘上。当主码盘上的不透明区正好与鉴相盘上的透明窄缝对齐时,光线被全部遮住,光电变换器输出电压为最小;当主码盘上的透明区正好与鉴相盘上的透明窄缝对齐时,光线全部通过,光电变换器输出电压为最大[6]。主码盘每转过一个刻线周期,光电变换器将输出一个近似的正弦波电压,且两个光电变换器输出信号A、B的相位差为90°。
所选编码器型号为ISC3004-701E-360B-5E,每转360个脉冲,分辨率为360°/360=1°,而设计要求分辨率为0.25°,故需对编码器输出信号进行四细分处理。四细分以后,每转可输出360×4=1 440个脉冲,每个脉冲转过的角度为360°/1 440=0.25°,满足设计分辨率要求。同时该传感器原理决定了无需要标定,可直接对其输出脉冲进行数据采集。
1.2 四细分处理电路的原理及设计
1.2.1 四细分处理电路的原理
细分原理:输入信号为具有一定相位差(通常为90°)的两路方波信号。基于这两路方波在一个周期内具有两个上升沿和两个下降沿,通过对边沿的处理实现四细分[7],具体设计论述如下。
1.2.2 Proteus环境下四细分处理电路的设计及仿真过程
为了提高设计效率,这里使用Proteus仿真软件设计电路,并模拟实际运行结果,用以检验硬件设计电路的可行性及四细分结果。具体过程为,在元器件库中找到MOTOR-ENCODER编码器来模拟输出两路相差90°的方波信号[8-9],用传统的单稳态四细分辨相电路对编码器输出的两路相差90°的方波信号做四细分辨相处理。
如图4所示连接电路,在虚拟仪器模式中使用示波器演示编码器正转与反转时输出波形,编码器的信号输出端A、B分别接示波器的A、B端,将u1、u2分别接到示波器的C、D端,在示波器上可同时观察到编码器的原始信号A、B及经四细分辨相电路后正转与反转时u1和u2输出波形。
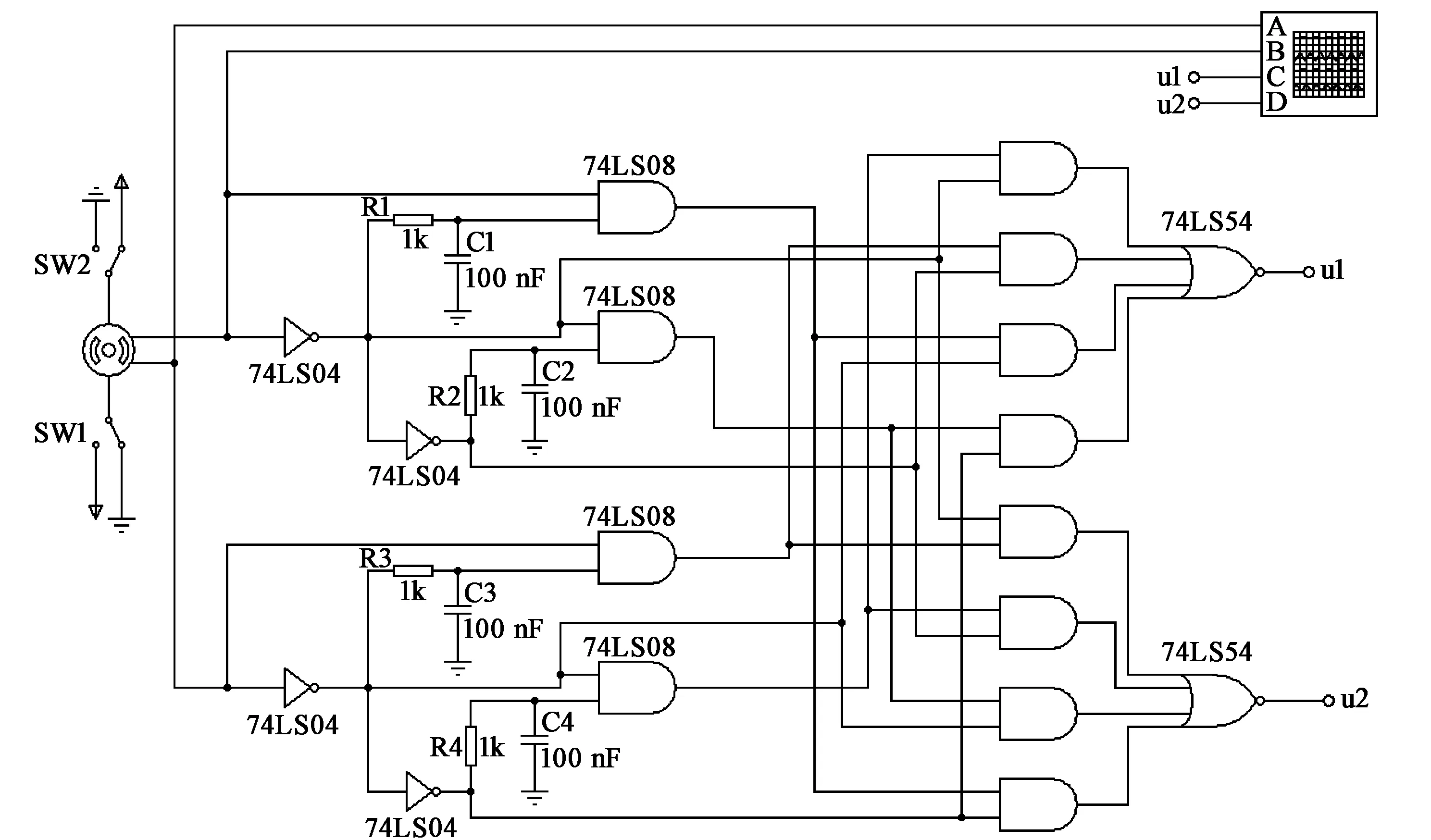
图4 四细分处理辨相电路
由图5仿真效果图可知,当编码器正向转动时,u1输出加计数脉冲,u2输出高电平;当编码器反向转动时,u1输出高电平,u2输出减计数脉冲。
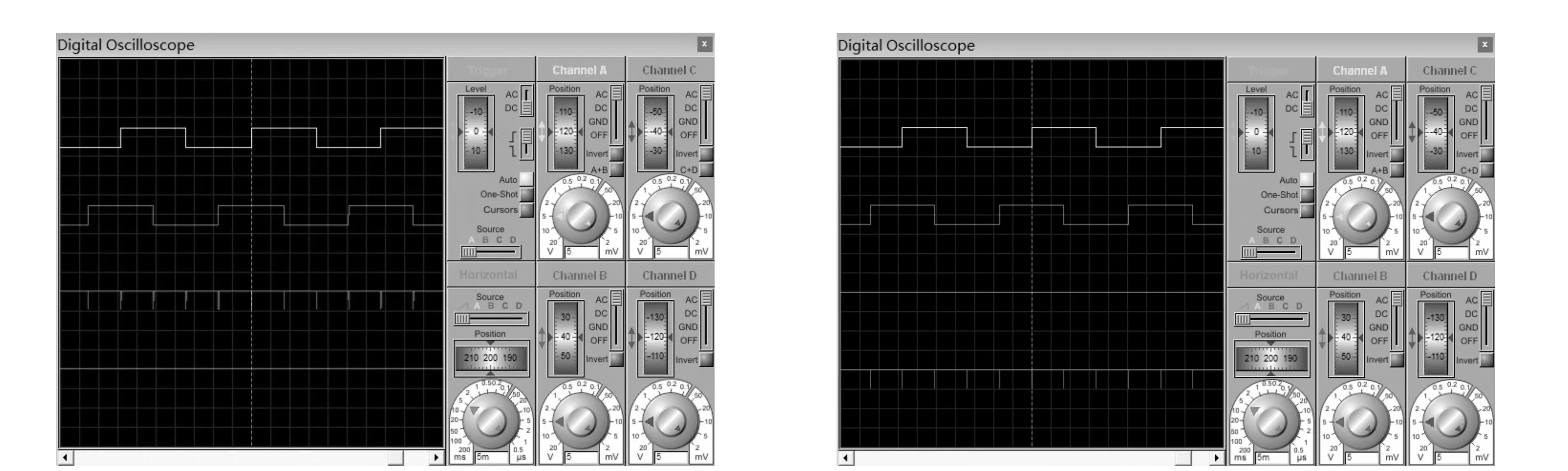
(a) 正转仿真波形 (b) 反转仿真波形
仿真实验验证其输出信号符合预期的四细分结果,同时也为实际硬件电路设计提供了有力依据。依据仿真电路参数,实际硬件电路设计中电阻选用1 kΩ,电容选用100 nF时输出波形比较理想,其它元器件按所实现功能,选用了一片74LS04芯片(6个非门)、一片74LS08芯片(4个与门)、两片74LS54芯片(与或非门)[10],进行实际测量系统的单稳态四细分辨相电路的搭接。实际硬件电路搭接好后,再次用数字式示波器观察四细分辨相后电路正反转输出信号(如图6所示),其结果与仿真效果图5显示完全相同,进一步验证了硬件电路设计各元器件参数选择的正确性和电路设计的合理性。
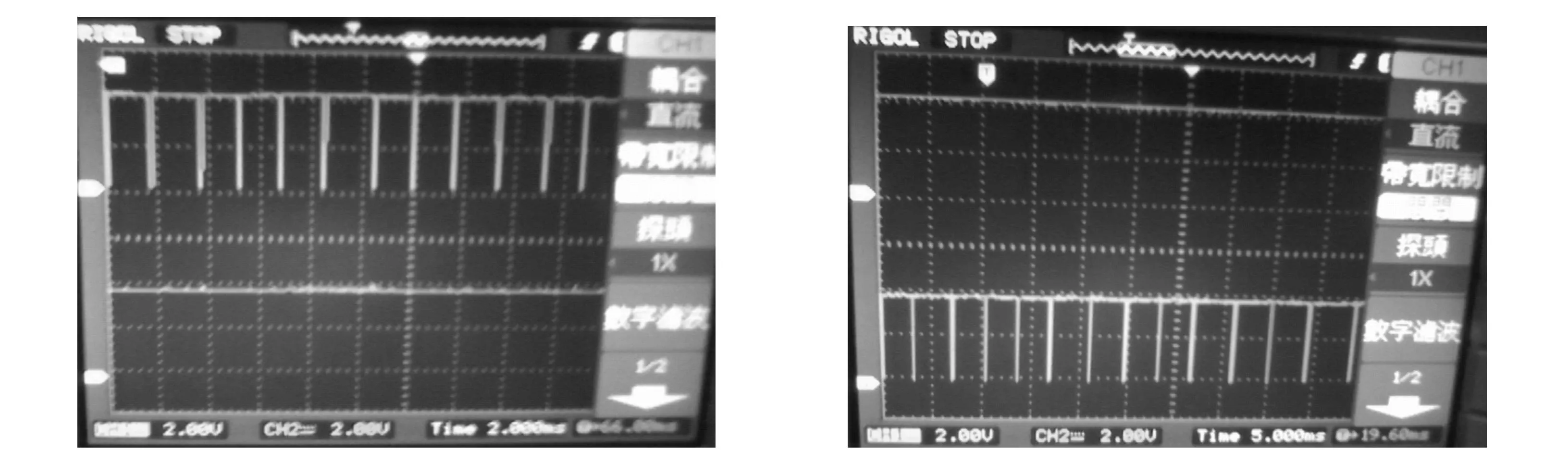
(a) 正转输出波形 (b) 反转输出波形
1.3 单片机最小系统电路和显示部分电路设计
该部分对于本次设计来说较为简单成熟,直接选用成熟的单片机最小系统设计电路(特别强调为了便于计算和编程这里选择12 MHz晶振),并选用LCD1602液晶显示器显示结果,该部分电路较成熟,在此不再赘述。
2 系统软件设计
Keil C51是美国Keil Software公司出品的51系列兼容单片机C语言软件开发系统[11],与汇编语言相比,C语言在功能上、结构性、可读性、可维护性上有明显的优势,易学易用。故本次使用Keil软件进行程序开发,编译生成HEX文件,并与Proteus仿真软件结合调试程序。
2.1 主程序流程图
采用C语言编写程序,其主程序流程图如图7所示。LCD1602第一行显示“THE ANGEL IS”,用单片机的T0、T1计数器计数,一路做加计数,一路做减计数,两计数器计数之差即为当前所记脉冲数,如果差值为正,则表示从基准位置正转;差值为负,则表示从基准位置反转。数据处理部分:将当前所记脉冲数(正或负)除以4(因为此时的脉冲为经过四分频)就可以直接得到编码器所转过的实际角度及方向,正数代表正转若干角度,负数代表反转若干角度,1个脉冲表示旋转角为0.25°。该计算方法简单,便与理解和处理。最后用LCD1602第二行显示所测转角。
2.2 计数器初始化流程图
用定时器计数器T0、T1对来自引脚P3.4和P3.5经过四分频外部脉冲信号进行计数,其流程图如图8所示。
2.3 LCD显示程序流程图
单片机应用系统最常用的显示器是LED和LCD,这两种显示器可显示数字、字符及系统的状态。由于LED显示信息量少,形式比较单一,人机交互性差,而LCD液晶显示内含有控制驱动器,使得它和单片机的接口电路实现比较简单,还具有功耗低、体积小、质量轻、超薄和可编程驱动等其它显示方式无法比拟的优点[12],故本系统选用LCD1602液晶显示屏,其流程图如图9所示。

图7 主程序流程图 图8 计数初始化流程图 图9 显示程序流程图
3 结 语
借助Proteus仿真软件设计电路,并将其中的虚拟信号加入设计电路仿真实际运行结果,有助于实际硬件电路相关元器件的正确选择和对输入、输出信号实际情况的透彻理解,大大提高了设计速度,同时为软件编程思想的构建理清了思路。文中介绍的转角检测系统是笔者所在的陕西理工学院承担的陕西省教育厅科研项目“下位机数据采集系统”的部分成果,较好地解决了课题中的角度测量问题,为后续综合测量系统的设计奠定了一定的基础。
[参考文献]
[1]刘际轩.高速重载滚珠丝杠副轴向动态刚度及实验研究[D].杭州:浙江大学,2012.
[2]曲海波.数控机床滚珠丝杠副调整维修[J].设备管理与维修,2013(12):24-26.
[3]欧扬,张纪龙.扭矩测试的发展动态和发展方向[J].华北工学院学报,1996,17(1):42-47.
[4]王煜东.传感器应用技术[M].西安:西安电子科技大学出版社,2006:100-102.
[5]姜义.光电编码器的原理与应用[J].传感器世界,2010,37(2):16-22.
[6]张杰.装船机大车位置校正装置的改进[J].起重运输机械,2013(5):104-106.
[7]赵庆阳.三维激光扫描仪数据采集系统研制[D].西安:西安科技大学,2008.
[8]王子博.编码器四倍频电路的单片机高速算法设计[J].控制与检测,2007(11):73-78.
[9]杨明亮.两路方波的软件四细分辨向[J].陕西理工学院学报:自然科学版,2004,20(4):15-16.
[10]马忠梅,张凯.单片机的C语言应用程序设计[M].北京:北京航空航天大学出版社,2007.
[11]崔金辉.电动注射泵控制装置的设计[J].电子世界,2013(5):135-136
[12]梁应选,杨明亮.基于容栅传感器和单片机的检测系统[J].实验室研究与探索,2013,32(6):25-29.
[责任编辑:魏 强]
The design of measurement system of rotation angle
based on single chip microcomputer
LIANG Ying-xuan,YANG Ming-liang,HE Ya-yin,DING Min
(School of Mechanical Engineering, Shaanxi University of Technology, Hanzhong 723000, China)
Abstract:With a clear understanding of measurement tasks, this paper studied the working principle of photoelectric encoder and method of Fourfold Frequency processing of the output signal. Based on this, a simulation analysis was made of the original signal and fourfold frequency signal by Proteus software so as to provide a sufficient basis for selection of hardware circuit components. And then a hardware detection system was constructed, using the AT89S52 single chip microcomputer as the main control unit and a photoelectric encoder as the front sensor, plus Fourfold Frequency processing circuit, and selecting LCD (liquid crystal display) to display measurement results, acquire signals and process data. The circuit of hardware detection system was simple in structure and low in cost.
Key words:measuring rotation angle;single chip microcomputer;simulation analysis;frequency;interpolate

