基于GPS和光电编码器的车辆定位装置的设计与实现*
2015-12-09徐丽霞
徐丽霞,徐 靖
(1.安徽国防科技职业学院 机电工程系,安徽 六安237011;2.六安供电公司 营销部,安徽 六安237011)
前言
在现代路产管理系统中,常常采用带摄像设备的采集车将公路沿途的路况、路面环境和周围的路标等设施采集成公路视频影像,然后在视频回放中结合GIS地图进行图像定位.在视频图像进行地理坐标定位时,由于车辆自带的里程表无法实现精确定位,而基于GPS的定位也存在一定误差.为了很好地解决这一问题,将车辆行驶里程和实际地理位置精确对应,采用GPS结合专用的定位设备是比较有效的方法[1].
本文设计了以ARM处理器为核心的里程定位装置,该装置能获得较为精确的里程定位数据,避免定位数据的丢失,保证了车辆的准确定位.
1 总体设计
本系统整体结构如图1所示.
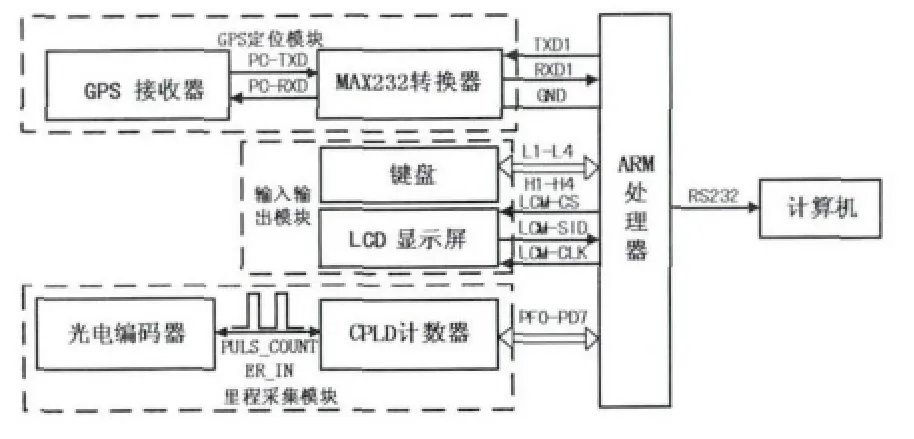
图1 系统整体结构图
该系统中主要硬件结构包括GPS定位模块、里程采集模块、ARM处理器和输入输出模块.GPS定位模块用于获得GPS数据,里程采集模块用于获得计数信号,ARM处理器将两种数据进行融合获得定位数据[2].
2 硬件电路设计与实现
2.1 GPS定位模块
GPS定位模块是由GPS接收器和MAX232转换器构成.
具体实施时,将GPS接收器固定在车辆顶部,然后启动GPS接收器并进行初始化和串口设置,确定连接成功后,GPS接收器开始实时采集车辆行驶的GPS数据并传递给MAX232转换器,MAX232转换器通过电平转换将接收到的GPS数据通过RS232串口实时传送给ARM处理器.ARM处理器从GPS数据中提取出由经度和纬度构成的位置数据以及相应的时间数据.
2.2 里程采集模块
里程采集模块由光电编码器和CPLD计数器构成.
具体实施时,光电编码器安装在车辆前右侧车轮的转轴上,在车辆启动时光电编码器的光栅盘同速旋转,通过光敏元件接收光通量整形后输出脉冲信号,每转一圈输出一个脉冲信号.光电编码器实时采集车辆行驶过程中车轮旋转一周所产生的脉冲信号,并将脉冲信号传递给CPLD计数器,CPLD计数器接收脉冲信号并进行分频处理后获得计数信号实时传递给ARM处理器.图2显示了里程采集模块对数据的处理过程.

图2 里程采集模块处理过程示意图
里程采集模块还包括光电隔离器6N137,光电隔离器6N137用于实现光电编码器和CPLD计数器的光电隔离[3].具体连接见图3所示.
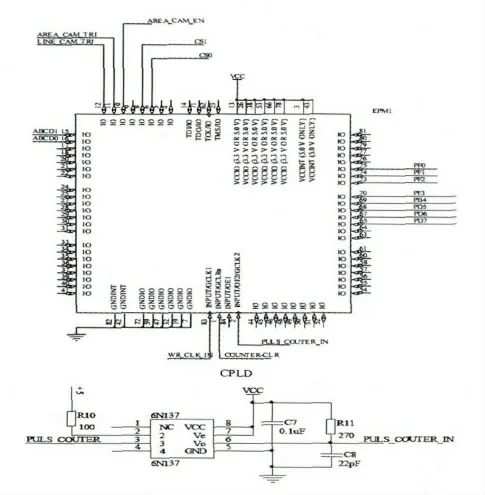
图3 光电编码器与CPLD计数器连接电路图
光电编码器将脉冲信号经光电隔离器6N137的PULS_COUNTER_IN引脚传送给CPLD计数器,CPLD计数器将计数信号通过PF0、PF1、PF2、PF3、PB4、PD5、PD6、PD7引脚传递给ARM处理器.
正式测量前,车辆需先行驶一个标准距离(如1 km),然后根据从起点到终点所获得的脉冲个数,用标准距离除以这段距离内的脉冲个数,从而获得单个脉冲对应的里程数.ARM处理器根据所获得的单个脉冲对应的里程数就能换算得出当前的里程值和车速值,然后传递给LCD显示屏.
2.3 ARM处理器模块
本文中ARM处理器采用的是工业级的ARM11处理器PXA270芯片[4],通过实时接收GPS数据和计数信号并进行融合处理后获得定位数据.
具体来讲,ARM处理器通过软件插值法将两种数据进行融合.在车辆行驶过程中,GPS接收器每秒接收一次经纬度数据,而1 s内CPLD计数器会收到若干个脉冲,假设两个经纬度数据之间有1 000个脉冲,则将这两条经纬度数据连成直线后分成1 000等份,使得每等份所对应的时刻都有经纬度数据,从完成在两个经纬度数据之间的脉冲插值操作获得定位数据,有效保证里程数据和经纬度数据的精确对应关系,然后将所获得的定位数据通过RS232接口传递给计算机并存入数据库中,方便路产管理系统人员的使用.
ARM处理器与各模块的连接如图4所示.
如图4所示,在电路连接上,MAX232转换器通过串口PC-TXD和PC-RXD接收GPS接收器传递的GPS数据,并通过串口TXD1和RXD1将GPS数据传递给ARM处理器[5].
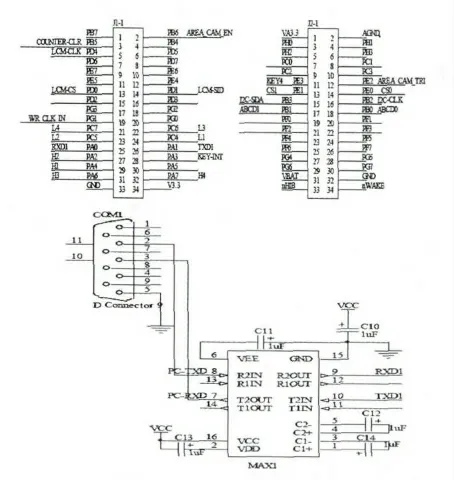
图4 ARM与MAX232转换芯片连接电路图
2.4 输入输出模块
输入输出模块包括键盘和LCD显示屏.LCD显示屏实时显示车辆行驶的里程值和车速值,键盘用于车辆标准距离的标定.在车辆启动后根据实际路面所见的两个连续的里程标志牌出现的时刻,通过键盘输入确认实现标准距离标定,本装置以1km作为一个标准距离.
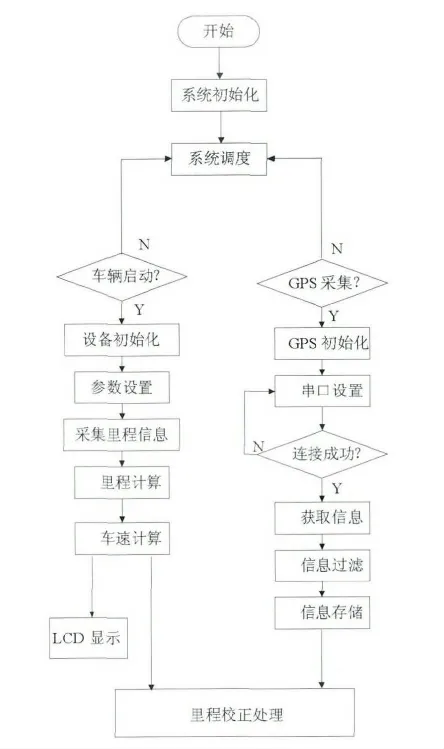
图5 程序流程图
3 软件设计
如图5所示,当车辆开始行驶后,车载电源启动供电,系统初始化,各模块开始工作.具体执行步骤如下:
1)系统初始化后进入系统调度过程,此时数据处理模块实时判断下一步的执行步骤;
2)车辆启动判断:是,进入步骤A;否则继续判断;
3)GPS采集判断:是,进入步骤B;否则继续判断;
4)步骤A:设备初始化,设置相应参数,里程采集模块进行里程和车速计算,并传送给里程校正模块,同时将信息通过显示模块显示;
5)步骤B:GPS初始化,对连接GPS模块的串口进行连接,如果连接失败则继续连接,如果连接成功则采集GPS数据,接着数据处理模块对获得的GPS数据进行过滤,提取经度、纬度、海拔、日期、时间等有效数据,数据处理模块将信息通过LCD显示屏显示.
4 系统测试
通过方案确定、硬件电路仿真、PCB制作、软件编写与调试,最终设计出如图6所示样机一套.
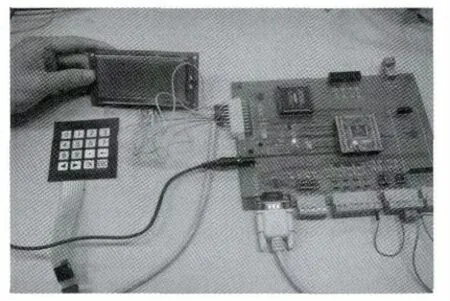
图6 样机实物图
为了确定系统能否满足设计要求,本文主要进行了如下测试:
1)系统上电功能测试;
2)GPS接收功能测试;
3)光电编码器接收功能测试;
4)1 km标定功能测试;
5)车辆启动后速度和里程信息能否正常显示功能测试.
图7 里程、速度显示界面
图8 1 km里程标定
经测试,该装置能实现上述功能,其中速度和里程信息显示见图7所示,1 km里程标定见图8所示.
为了测试本文设计的装置与GPS定位、里程表定位相比是否具有优势,将本文所述装置装载到车辆上进行了行驶实验,通过对实验数据的整理分析,得出了表1所示的对比数据.

表1 实验结果对比
从表1的数据可以看出,本文设计的装置从多个参数角度来看都优于其他两种方法,平均绝对误差比GPS定位减少了4.66 m,比里程表减少了2.2 m,从而进一步提高了定位精度.
5 结论
经测试本文设计的车辆定位装置能在车辆行驶过程中对行驶里程进行实时检测和定位,数据准确度高,同时通过键盘输入还能进行现场路面里程值的标定,保证里程数据与所在位置图像的准确对应,具有一定的应用价值.
[1]徐丽霞.路产影像管理系统中里程校正方法的研究及实现[D].长安:长安大学,2009.
[2]徐丽霞.路产影像管理系统中里程校正方法的研究[J].常州工学院学报,2011(10):31-33.
[3]邵辉,舒嵘.光电隔离器6N137的特性和应用[J].电子技术,1996(2):38-39.
[4]周祺睿.通用PXA270嵌入式开发平台设计与实现[D].成都:西南交通大学,2008.
[5]孙华.车载式公路路产信息采集系统研究与实现[D].长安:长安大学,2010.
