智能交通系统仿真方法研究
2015-12-09丁郁赵婷婷LIUYi
丁郁 赵婷婷 LIU+Yi
摘要:智能交通系统仿真可以再现交通流运行规律,为智能交通管理提供科学依据。提出了一种智能交通仿真系统,具有交通信息实时提取、微观交通流实时控制以及区域内交通信号协同控制等特点,可以同时满足智能交通在交通安全与交通效率方面的仿真需求。
关键词: 智能交通系统;高层体系架构;交通仿真;群智感知;协同计算
近年来,汽车逐渐成为人们日常生活中的主要交通工具之一。一方面,汽车的出现为人类的出行提供了便利;另一方面,汽车使用量的持续增长[1]带来了一系列的交通问题。世界卫生组织在2015年“道路交通伤害”报告[2]中指出,目前全球每天约有124万人因道路交通碰撞而死亡,另外还有2 000万至5 000万人因此受伤。在中国,道路拥堵、停车困难频发,已经成为人们出行必须面对的难题。以北京为例,堵车造成的社会成本损失每年高达200多亿人民币[3]。
为了更好地发挥车辆的作用,减少交通事故对人类的伤害,提高道路通行效率,各国政府和研究机构开始了道路交通方面的研究,尤其是对智能交通系统(ITS)的研究。ITS将先进的信息技术、通信技术、传感技术、控制技术、计算机技术等有效地集成并运用于整个道路交通管理体系,其主要目标是提高道路安全、缓解交通拥塞、减少资源消耗和环境污染、实现公共资源的最大利用。
在ITS中,每辆车都配备有全球定位系统(GPS)、通信、车载诊断系统(OBD)等环境感知单元,有的车辆甚至配备有辅助驾驶等控制单元。ITS通过环境感知和通信模块实现车车、车路之间的信息群智感知和协作计算,进而实现整个智能交通网络的信息收集和监控管理工作。
与构建实地实验相比,智能交通系统仿真具有经济、安全、可复现、数据易收集、场景可控等优势,可以再现交通流运行规律,方便采集交通流等数据进行交通控制效果分析,实现各种交通场景的模拟,以及智能交通中车车、车路之间的信息交互,信号灯协调等功能,为ITS进行管理、控制和优化提供科学依据。仿真测试的优势可以总结为以下3个方面:
(1)规模化仿真。可以实现大规模路网、高密度交通流及高负荷信息交互环境下的车车、车路协同仿真。
(2)多粒度仿真。可以从微观、中观、宏观多角度对车联网整体效率及安全模式进行分析。
(3)重复性仿真。可以重复对实际环境中交通危险行为和事故进行仿真分析。
1 智能交通仿真发展及现状
其他国家的智能交通仿真研究经过了很长时间的积累,已取得了很多科研成果。研究大致可分为3个阶段:
(1)第1阶段,最具代表性的研究成果是英国道路与交通研究所开发的仿真软件TRANSYT[4]。TRANSYT是一种离线优化交通网络信号系统,以总延误时间和总停车次数的加权值作为目标函数,并通过爬山法进行优化。
(2)第2阶段,最具代表性的研究成果是美国联邦公路局开发的微观交通仿真模型NETSIM[5]。NETSIM的设计目的是分析由于信号控制、行人、公共汽车、停车、工程施工等因素所导致的交通阻塞现象,其对城市道路交通现象的描述精度达到了一个新的高度。
(3)第3阶段,最具代表性的研究成果是Paramics、TransModeler等集成化的多功能交通仿真软件[6]。这两种软件集成了路网绘制、可视化、信号控制、仿真数据统计分析等功能,可以分析各种交通条件下,如车道设置、交通构成、交通信号、公交站点等,城市交通和公共交通的运行状况,是评价交通工程设计和城市规划方案的有效工具。
与这些研究相比,中国的智能交通仿真研究还处在相对落后的阶段。清华大学、浙江大学、同济大学、北京工业大学等科研院所在交通仿真软件方面已经取得了阶段性的成果。其中,北京交通大学的王宏[7]对交叉口信号预测控制进行了研究,提出基于元胞自动机的交通信号预测控制策略,利用遗传算法对交叉口信号配时进行优化。清华大学的李强等提出了基于路径的动态交通仿真模型RDTS[8],实现路网中每辆车整个行驶路径的模拟。同济大学的钟邦秀[9]则提出了基于面向对象的微观交通仿真模型的建模过程。
2 智能交通系统仿真设计
2.1 智能交通系统仿真框架
典型的智能交通系统仿真重点关注城市交通规划及交通管理控制方案的仿真验证,城市交通系统的通行效率为主要评估指标。然而,道路安全同样是智能交通系统的研究重点。因此,我们在效率评估的基础上补充了安全相关技术方案的仿真模拟和效果评估,对相关技术方案改善交通系统安全性的效果进行评价。为了实现道路安全技术仿真,仿真系统需要加深对车辆的控制程度。在不同的控车等级,仿真系统对关键数据(通信延误、定位误差、传感器参数)指标的需求不同,通过模块化仿真的手段对关键数据进行测试能够提高效率、减少成本。
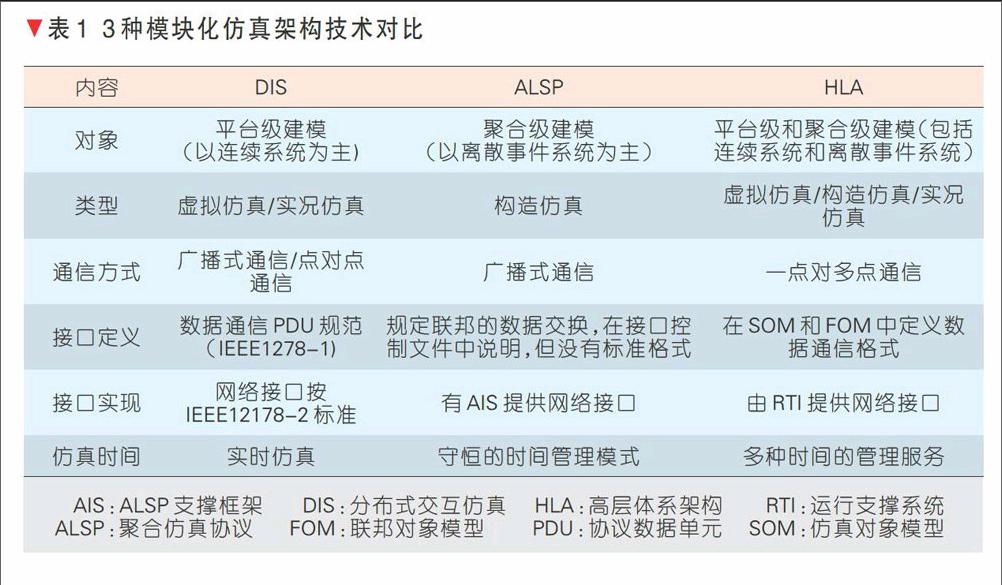
针对智能交通系统的高交互性、系统复杂性的特点,仿真系统通常采用模块化仿真方式。模块化仿真自提出以来经历了分布式交互仿真(DIS)、聚合仿真协议(ALSP)、高层体系架构(HLA)3个阶段[10],其技术特点如表1所示。
在分布交互仿真和聚合级仿真协议的基础上建立的HLA是新一代模块化仿真框架,它采用对称的体系结构,即在整个仿真系统中所有的应用程序都通过一个标准的接口进行交互作用,可以有效降低大型复杂系统仿真的难度同时保证各个仿真成员的独立性。
目前,HLA已经广泛应用于各种多系统、多模块的仿真系统中。在进行大型复杂的军事仿真时,美国、欧洲等国家或地区都把HLA作为标准的仿真体系。中国海军航空工程学院的导弹装备军民一体化维修保障仿真系统[11]、北京交通大学的CTCS-3级列车运行控制系统仿真平台[12]、西北工业大学航天学院的机载激光武器仿真系统[13]、华中科技大学控制科学与工程系的导弹作战虚拟仿真系统[14]等都采用了HLA作为仿真系统框架。
2.2仿真模块构成
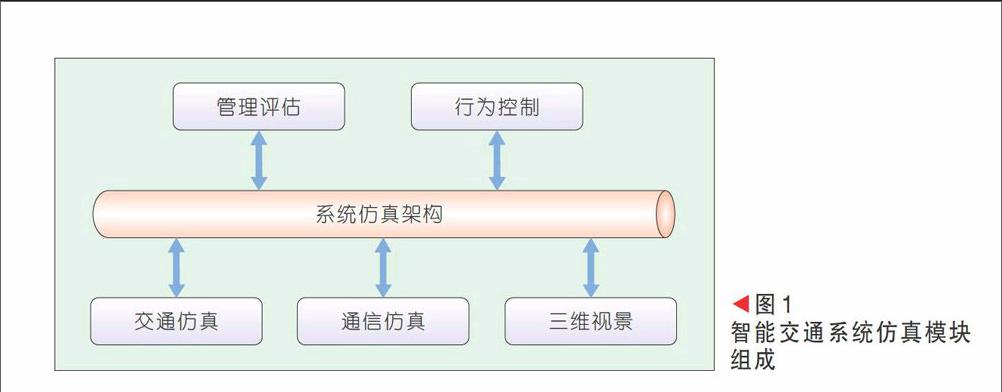
为了兼顾交通安全与交通效率的智能交通系统仿真需求,我们设计了一种具有交通信息实时提取、微观交通流实时控制以及区域内交通信号协同控制等特点的智能交通仿真系统。交通仿真系统由以下5个系统模块组成,如图1所示。这5个系统模块分别为:交通仿真模块、通信仿真模块、三维视景模块、管理评估模块、行为控制模块。
(1)交通仿真模块功能。通过绘制交通路网,设定路口交通信号控制方法,输入车流参数来进行交通仿真;通过底层车辆行驶模型参数来改变车辆行为特征;提取车辆状态信息、控制车辆的行为,生成危险仿真场景。
(2)通信控制模块功能。通过交通仿真模块提取的车辆信息,将每辆车作为一个通信节点,模拟车联网中车车、车路通信过程,并且实现通信延误、通信丢包等功能。
(3)三维视景模块功能。提供路网中关键元素的可视化呈现,能够随着仿真动态展示车辆的行为状态,以及提供车内视角可视化呈现。
(4)管理评估模块功能。管理仿真平台各个模块的运行和暂停,将危险场景以数据化的形式发送给交通仿真模块,并通过交通仿真模块中危险场景的生成、通信控制模块中节点通信情况和车辆行为控制模块的预警信息,管理数评估模块能够给出特定参数如定位、通信、传感器与车辆安全的关系,达到评估系统参数和预警方法的目的。
(5)行为控制模块功能。能够通过加载车辆行驶模型等对车辆的下一步运行状态进行预演,结合仿真路网所有车辆信息,判断车辆安全情况,在可能发生危险/拥堵时提前给出预警信息,并改变车辆行驶状态,以避免危险/拥堵情况发生。
2.3仿真流程
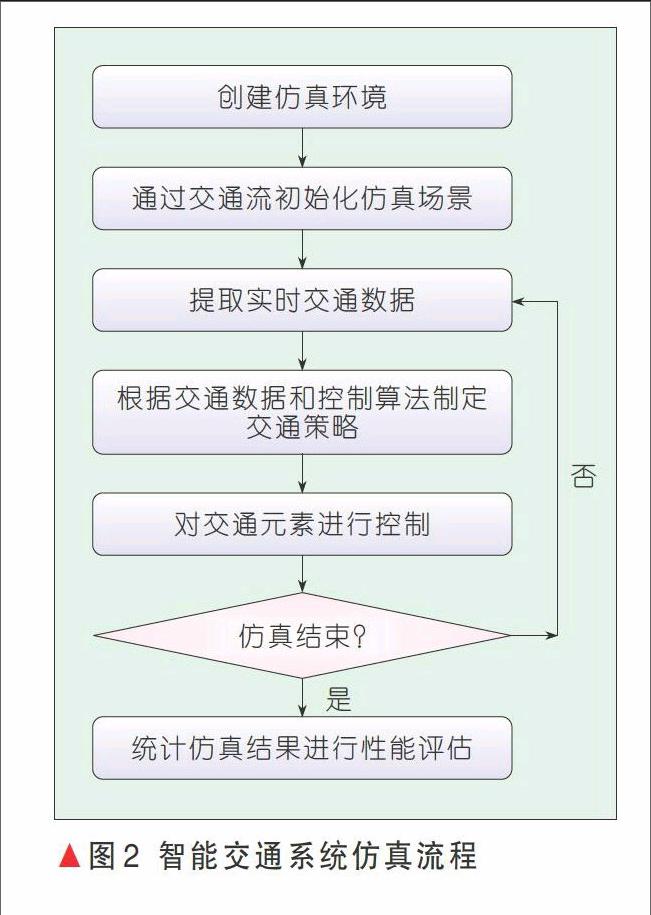
如图2所示,在我们的智能交通系统仿真过程中,首先要创建仿真环境,并根据真实的交通流数据或经验数据来复现交通场景。智能交通系统中离不开车车/车路之间的无线通信,因此在仿真的过程中,需要实时提取交通数据,根据实时交通流数据与控制算法制订交通安全或交通效率策略,并根据制订的交通策略,对交通元素进行行为控制。仿真结束后,还需要对仿真数据进行统计分析,对交通安全或交通效率控制算法进行性能评估。
2.4 仿真案例
为了验证仿真平台的可行性,我们利用Q-Paramics进行了道路建模:长度为2 km,单方向3车道,2个信号灯。车辆到达时间服从负指数分布,平均每小时的不间断车流量为800辆。智能交通系统仿真通过6台服务器分别运行交通仿真、通信仿真、控制模块、评估模块、行为控制模块、三维视景模块功能。6个功能模块互联,共同构成了智能交通系统仿真平台,如图3所示。
2.5 关键技术
我们的交通系统仿真需要兼顾交通安全与交通效率两方面的仿真需求,因此存在3个关键技术:全时空交通信息提取技术、微观交通流仿真模型优化技术以及多交叉口信号灯协同控制技术。
(1)全时空交通信息提取与控制技术。交通仿真数据的提取,是实现仿真控制的基础。仿真数据获取后,需要对数据进行处理,如车辆位置转换为经纬度信息,车辆相对速度转换为绝对速度信息等。仿真数据的实时获取以及有效利用是影响仿真运行效率的关键问题。获取的数据经过处理之后将控制决策输入到仿真网络中,可以实现控制策略对仿真网络的数据控制。
(2)微观交通流仿真模型优化技术。微观交通仿真模型是运用数学方法对城市道路交通系统的抽象。智能交通系统仿真中,由于存在车车、车路通信,驾驶员的行为方式会产生一些变化,所以传统的交通流仿真模型已经不能完全表现交通流的运动情况,需要在已有的基础上进行改进。
(3)多交叉口信号灯协同控制技术。传统的单交叉口和干线控制策略,不会根据区域交通流量情况来改变控制策略。在智能交通系统中可获取车辆位置信息,从而得到区域交通流量信息,对这些信息进行处理、分析的基础上模拟协同控制算法可以实现单交叉口和干线信号的协同控制,从而验证智能交通灯算法、车速引导算法等的有效性。
2.6 评价方法
系统仿真的评价方法分为两种:交通流优化和通信优化。
(1)交通流优化。交通流优化的目标是评价交通流管理的优化效果,主要包括两个方面:与交通效率相关,如出行速度、时间、整个路网的吞吐量等;与交通安全相关,如最小车距、碰撞次数、预警信息等。
(2)通信优化评价。主要包括车车、车路通信效率的提升,评价参数有上下行通信成功率、上下行通信时延、网络吞吐量等。
3 结束语
在文章中我们回顾了智能交通系统仿真的研究现状与功能特点,提出了兼顾交通安全与交通效率的系统仿真设计思路。智能交通系统仿真对于模拟具有多层次、交互性特征的智能交通系统有较好的适应性,通过模块之间的分工协作可以实现仿真时间管理、跨平台数据交互、不同模块成员互操作、仿真进程控制、应用策略灵活集成等主要功能。
中国的道路交通环境与发达国家不同,存在混合交通流、驾驶不规范、交通工具种类多、行人违规行为多等特点。因此,在设计开发智能交通系统仿真的同时,我们还需要仔细研究中国城市交通的具体特点,为实施科学的道路交通管理计划提供科学依据。
参考文献
[1] The World Bank.The World Bank Indicators [EB/OL].(2012-06). http://data.worldbank.org/indicator
[2] 世界卫生组织.道路交通伤害[EB/OL].(2015-05). http://www.who.int/mediacentre/factsheets/fs358/zh/index.html
[3] 吴栋栋, 邵毅, 景谦平等. 北京交通拥堵引起的生态经济价值损失评估[J]. 生态经济, 2013, (4):75-79
[4] CHARD B M, and LINES C J. TRANSYT- The Latest Developments[J]. Traffic Engineering & Control,1987, 28(8): 387-390
[5] ERKOLLAR A. The NETSIM Modeling Concept[C]//Proc. ASIM98, Zurich, Switzerland, 1998:323-330
[6] 邹智军,杨东援.道路交通仿真研究综述[J].交通运输工程学报, 2001,1(2): 88-91
[7] 王宏.基于元胞自动机的交通流仿真及其与信号预测控制相结合的研究[D].北京交通大学硕士论文, 2009
[8] 李强,缕立新,段进宇.基于驾驶员路径选择的动态交通仿真模型[J].公路交通科技, 2001, 18(6): 65-69
[9] 钟邦秀,杨晓光.面向对象微观交通仿真系统的研究与实现[J].系统仿真学报, 2002, 14(4):418-421
[10] 高世峰,蒋海滨,周红梅.分布交互式仿真体系结构发展状况的研究[J].计算机仿真, 2003,(2): 76-78
[11] 徐廷学,赵建忠,余仁波,顾均元. 基于HLA的导弹装备军民一体化维修保障仿真系统设计与实现[J].系统工程理论与实践, 2013, 33(3):802-808
[12] 李博,王俊峰. 基于HLA的CTCS-3列控系统仿真管理器研究[J].铁路计算机应用, 2010,19(9):41-44
[13] 王佩,吕梅柏,李言俊,田进. 基于HLA的机载激光武器仿真系统设计[J].西北工业大学学报, 2011, 29(2):198-204
[14] 彭亮,黄心汉. 基于HLA和Vega+Prime导弹作战虚拟仿真系统研究[J].中南大学学报, 2011, 42(4):1015-1020
