强化信息通信技术和机器人技术融合
2015-12-08日本加贺谷丰明
(日本)加贺谷丰明 著
张炜 编译
强化信息通信技术和机器人技术融合
(日本)加贺谷丰明 著
张炜 编译
随着M2M(Machine to Machine)和传感器网络的发展,与云计算协同工作的机器人创造新附加价值的时代已经来临。对此,本文通过介绍一些开放系统和研发活动,以验证实现信息通信技术和机器人融合的战略。
1 机器人的定义
在日本,“机器人”一般指的是工业机器人或人形机器人。日本经济产业省机器人政策研究会把“机器人”广义地定义为“具有传感器、智能控制系统和驱动系统三种技术要素的机械装备”,也就是“机器人是一种智能化的机械系统”①。然而,近年随着机器人技术的应用领域不断扩大,业界对上述定义的解释也在发生变化。
本文探讨的机器人,不仅仅指的是机器人本体,而是把它看成为利用机器人本体和机器人技术组成的机器人集成系统。而且,这里所研究的机器人也不是采用独立的计算机控制进行作业的机器人,而是包括通过与云计算中的资源和服务协作,在整个智能化空间里有效、安全地作业的机器人,同时,机器人也是在整个智能化空间中行动并提供服务。
2 机器人技术的环境
近年来,信息通信技术(ICT)的迅速发展加快了智能电网和智能城市的建设(图1)。由于传感器网络和智能空间的扩大,和网络连接的机器人的应用领域也在不断地扩大。
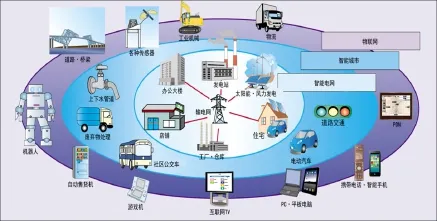
图1 智能空间和机器人应用领域
不断涌现的M2M和传感器网络等新的信息基础设施和解决方案,形成了机器人协作的良好环境,大大促进了信息通信技术和机器人技术的融合,使得机器人能够对社会和市场提供更多的服务。
例如,机器人通过传感器网络获取外部信息,成为能够进行更有效、更安全移动的智能化移动机器人;或者机器人从大数据中获取具有更高附加价值的信息,反馈给现实世界;或者机器人根据从云计算中收集到的大数据信息,自动决策自己的行动等。
3 从M2M到M2M2A
M2M指的是通过网络连接起来的机械设备(Machine)之间可以不需要人的介入就能相互交流信息,以形成最佳自动控制的系统,机器人实际上也是其中重要的机械设备之一。
将来,传感器技术和机器人技术融合,使传感器的可视化信息和服务协同起来,除了M2M,还可以将结果传送给执行操作(Actuate-Action)的机器人,形成现实和虚拟融合的M2M2A解决方案(图2)。
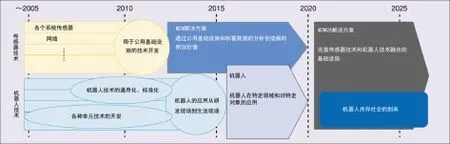
图2 传感器技术和机器人技术的发展趋势
4 信息通信技术和机器人技术融合的应用领域
4.1 生活支援
在护理服务设施内,需要利用机器人技术帮助要求护理的人尽量自立生活,从而帮助护理人员减轻体力劳动的强度。实际上,日本在2012年就已经决定,护理机器人从2015年起作为护理保险的对象,并加快了在该领域应用机器人的研究开发和演示实验进程。
高龄老人和需要护理的人周围的各种护理和医疗设
施等,经过M2M协同起来,在云计算上收集重要的生命数据和日常行动要求,将PHR(Personal Health Records个人健康记录)和生命档案进行对照,从而减轻看护人员的负担,实现对被护理人健康状态的综合管理。
应用机器人技术能够更容易地感知和获取生命数据,使康复器材和程序最有效地控制个人的健康状态,建立针对过量或者忘记吃药的服药管理系统等,真正对实际生活发挥有效的作用。
目前最需要研究开发的是能够自主移动的情感交流机器人。由于远距离或人手不够,医院的工作人员、患者、家属等在不容易进行交流时,这种机器人能够安全有效地在医院或地区护理设施内,移动到任何一个人的身旁,采用视频会议的功能识别对方的表情、话语,与对方进行对话。这类对话不是简单的对话,它包括在需要诊断或专业洽谈时,或者需要通过机器人对被护理人的生活习惯提出建议时,这种机器人能够利用云计算数据,提供全面的个人健康记录或者建议,这样就给服务对象和医务工作人员都带来许多方便。
4.2 社会基础设施维修
大规模的建筑物、水电气生活设施等社会基础设施的维修问题近年受到重视,这些基础设施一旦毁坏,会给社会带来巨大的经济损失,所以预先检修和维修是非常重要的工作。在日本,社会基础设施大多是在日本经济高度成长期建造的,近年面临着需要同时更新的局面,再加上出生率低和高龄化社会的到来,地方自治体税收有所减少,所以必须以最低的成本实现最佳的维修效果。而维修作业往往需要在高空或危险、苛刻和肮脏的环境下进行,所以更需要机器人来完成任务。
日本现已研发了有关社会基础设施维修中对于桥梁的监测系统 BRIMOS(Bridge Monitoring System),这是基于M2M云计算的解决方案,用于监测桥梁结构的变化。该方案在桥梁上设置有各种传感器,能够实时和持续地监视桥梁的变化状态。
BRIMOS中虽然没有直接采用机器人本体,但是它是M2M云计算解决方案和机器人技术的融合,目的是实现更具附加价值的服务。只有当在维修对象上难以设置传感器器材,或者需要进行长距离、大范围内进行检查时,采用自主移动机器人,利用云计算的地图信息服务,通过自主移动和位置同定功能,实施有效的检查作业;机器人在自主移动的过程中,把检查对象的图像传送到云计算上,在云计算上基于大量的图像数据进行高速高精度的图像处理,从而实现异常环境下的检测工作。
5 机器人的开发环境
5.1 RT(Robot Technology)中间件
机器人业界大力提倡开放化,以利用资源开放和环境开放的开发环境,这对于建立机器人技术和信息通信技术的协作关系也是非常重要的。
在日本服务机器人业界起主导研究作用的独立行政法人产业技术综合研究所(以下简称产综研),为了普及服务机器人,作为开放战略,提出了机器人的软件组件(RTC: RT Component)的标准接口规格OMG(Object Management Group)②,并于2008年公布了OMG的标准规格。同时,产综研根据该规格开发和公开了应用RTC的中间软件,即RT中间件③。
为了提高对应 RTC、RT中间件的设计质量,产综研还开发了状态迁移表设计工具(ZIPC),这有效地提高了软件的开发效率(图3)。
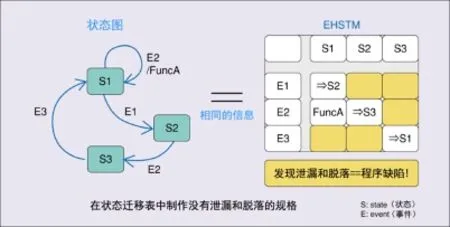
图3 扩展分层状态迁移表(EHSTM)
5.2 性能安全
许多机器人都具有驱动系统,为了不给人和环境带来危险,机器人必须有高度的安全对策④。
在国际上,2013年发布了以性能安全规格IEC61508⑤为基础的个人机器人(与人接触的交流型机器人)的国际安全标准ISO13482,引起了机器人业界的关注。为了有利于机器人取得IEC61508认证,日本对机器人高可靠性软件的开发环境进行了讨论,探讨了在嵌入式软件的V字型开发周期内,如何实现在ZIPC产品组和其他有力的OSS工具之间能够进行无缝跟踪要件的结构和方式,开发方在风险评估中,能够在总体上承担从要求到设计、组装、验证的说明责任,使开发工具能够容易地设计出高可靠性的软件(图4)。

图4 高可靠性软件的实现进程(工具链)
5.3 从开发环境到与云计算的协同
与云计算协同有许多优点,由于RT中间件能够使分散在网络上的RTC连接起来,如果云计算上具有RTC标准接口,即云计算服务应用程序接口API( Application Program Interface),那么具有RT中间件的机器人就能够很容易地利用云计算服务。
从开放化的观点出发,日本将来的目标是构建在云计算上容易利用各种RTC的开发环境,以及能够很简单地组装RTC接口的开发环境,以实现云计算上的资源和机器人的应用软件协同作业的环境。

图5 云计算机器人概观
6 今后的方向
6.1 机器人远程操作管理
对机器人的普及而言,机器人本身的维修和操作管理技术是非常重要的。例如,在有希望应用机器人的卫生保健领域,现在已经有许多租赁的福利器械和用具,由于用户是高龄老人,所以周到的维修服务和监测很重要。因此,在开发环境中,需要有能够获取机器人或设备运行的日志信息、误操作故障信息和工作效率信息的模块和接口,以便在M2M云计算中容易得到这些信息,并可以表现在福利器械的服务计划中,提高维修操作服务的附加价值。
6.2 云计算机器人
有权威人士曾经说过,“云计算能使机器人变得更加轻巧、廉价和智慧”。原来单独操作的机器人可以从云计算上得到以前不具备的高速计算机、寄存器、性能和知识,成为能够为用户提供更多服务的机器人系统,所以,如何将云计算机器人基础技术和解决方案与M2M云计算协同运行是日本今后研究开发的课题(图5)。
①日本专利局对机器人的定义:机器人是
具有机械手操作功能的机械;
具有移动功能,并具有自动从外部获取信息决定自己行动功能的机械;
具有通信功能,并具有自动从外部获取信息决定自己行动功能的机械。
②OMG:推进指向对象标准化的非盈利团体,推进具有代表性UML和CORBA的标准化。OMG内从2005年开始进行有关机器人的活动“Robotics DTF(Domain Task Force)”。
③ RT中间件:以组件的形式提供控制机器人构成单元(传感器、驱动器)和机器人的软件称为中间件。
④ 性能安全:在性能上下工夫,在允许的范围内确保安全。对应的术语是“基本安全”。
⑤ IEC61508:IEC(国际电气标准会议)制定的有关制造行业电气、电子、可编程序电子设备的性能安全国际标准,是许多领域性能安全标准的基础准则。