分布式AP选择策略在室内定位中的应用*
2015-12-07葛柳飞赵秀兰李克清
葛柳飞,赵秀兰,李克清,戴 欢,张 骞
(1.中国矿业大学计算机科学与技术学院,江苏徐州221116;2.常熟理工学院计算机科学与工程学院,江苏常熟215500)
0 引言
室内定位是一种用于获取室内目标物体位置信息的技术,在民用和军用领域具有广泛的应用前景。常见的定位算法主要基于接收信号强度指示(received signal strength indication,RSSI)、到达时间(time of arrival,TOA)、到达角度(angle of arrival,AOA)等技术[1]。其中,基于 RSSI的定位算法具有低功耗、低成本且易实现的优点[2],被广泛应用于无线室内定位。
基于RSSI的定位算法通常分为:基于信号传播模型的定位算法[3]和基于指纹模型的定位算法[4]。在具有大量AP节点部署的无线网络中,为了获得目标位置,上述方法所处理的数据都是高维向量(AP节点的个数)。同时,由于物体遮挡和节点故障等因素,导致将所有AP节点作为特征输入的定位效果并不一定最优,冗余的AP节点增加了位置估计的难度,易造成过度拟合,并增加了时间和空间的复杂度。针对该问题,采用合适的选择机制筛选AP节点,获得较优的AP节点作为特征输入,既达到降维的作用,又提高了定位精度。文献[5]提出使用数据挖掘技术选择较优的AP节点,通过筛选的AP节点建立位置指纹库。
本文提出一种分布式AP选择(distributed selection on AP,DSAP)算法,能够有效去除较大噪声或者位置分辨能力弱的AP节点。实验表明:在12 m×12 m的区域范围内,该算法平均定位误差为0.4151 m,较反向传播(back propagation,BP)算法、RADAR[6]算法而言,定位误差低,且降低了定位算法的复杂度。
1 定位模型
不同AP节点的信号强度作为一种可识别的模式(指纹),被用于区分不同的位置点。假设在位置点A获取D个AP节点的信号强度,构建D维信号向量RSSD

式中 rssi∈[-100,0]为位置点A处接收到第i个AP节点的信号强度。
位置点A与D维信号向量之间存在映射关系,数学表示为

训练数据集中包含N条记录,每条记录可表示为向量r,向量中包含可用AP节点的信号强度和采样点的位置

式中 D为AP节点个数,Li为对应RSS向量的位置标签。
在线定位就是利用离线阶段建立的信号—位置映射模型预测移动目标的位置。
2 深度置信网络
2.1 受限玻耳兹曼机
受限玻耳兹曼机(restricted Boltzmann machine,RBM)由可见层和隐含层两部分构成,神经元之间的连接被限制在不同层,相同层之间不存在神经元的连接,如图1(a)所示。RBM是一种基于能量的模型,其能量函数定义如下

式中 I和J分别为可见层和隐含层的神经元个数,xi和hj分别为可见层第i个神经元与隐含层第j个神经元的值。θ =(wij,ai,bj)为 RBM 的参数,wij为可见层节点 xi与隐含层节点hj之间的连接权值,ai和bj分别为xi和hj的偏置值。
该联合概率分布为

式中 Z(θ)为归一化项。
2.2 深度置信网络模型
为解决BP网络易陷入局部最优的问题,Hinton G等人[7]于2006年提出了深度置信网络(deep belief networks,DBN),其在图像处理[8]、语音识别[9]等领域发挥了重要作用。
RBM是DBN的基本构建块,如图1(b)所示。当高维数据输入RBM1可见层,隐含层将通过连接权值提取输入数据的特征;同时,RBM1隐含层的输出将作为RBM2可见层的输入,RBM2隐含层将进一步提取数据的深层次特征[10]。若干个RBM模块构成了DBN模型,其在预训练的过程中通过层与层之间的能量函数初始化网络权值,最后通过BP算法来微调网络间的权值。
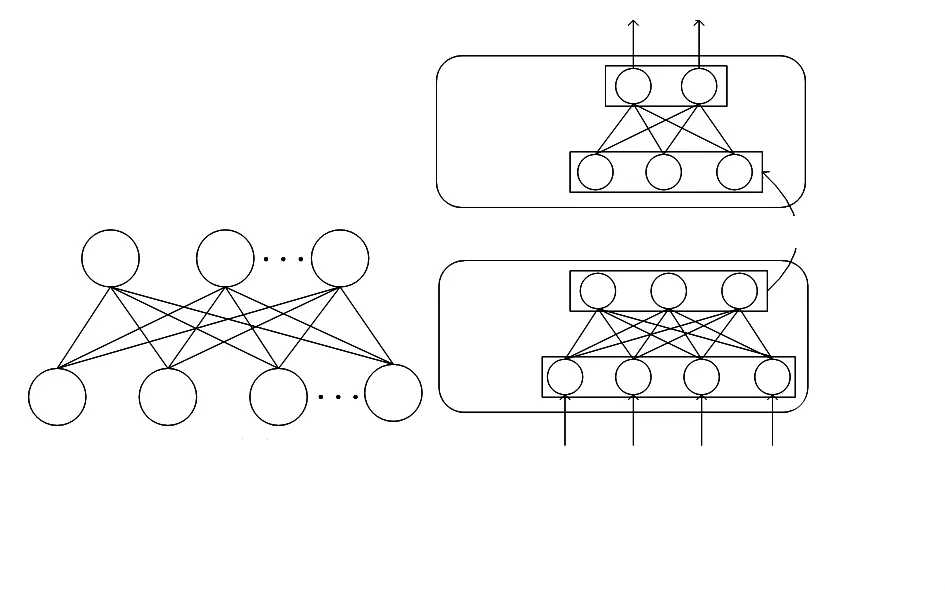
图1 RBM和DBN模型Fig 1 RBM and DBN models
3 分布式AP选择策略
在复杂的室内环境中,AP节点非全可用的问题增加了位置估计的不确定性。本文提出了一种分布式AP选择策略,首先将定位区域S划分为m个子区域,子区域定义如式(6)所示

式中 c为第c个子区域,k为该子区域中位置点的个数,S为定位区域,m为区域个数。
根据子区域与各个AP节点的相关性,将输入向量RSSD分割为 m 个非空子集 (RSS1,RSS2,RSS3,…,RSSm),且非空子集RSSc与子区域Rc相对应,最后将非空子集RSSc作为特征输入来训练子区域Rc的定位预测模型。
假设在该子区域中,扫描区域中k个位置点上第j个AP节点的信号,那么,该AP节点在此区域的相关性系数定义如下
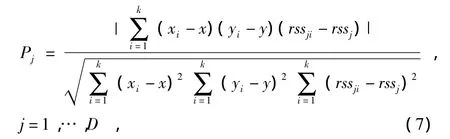
式中 Pj为第j个AP节点与该区域的相关性,xi为第i个位置点的X轴坐标,x为该区域中k个位置点的X轴坐标的均值,yi为第i个位置点的Y轴坐标,y为该区域中k个位置点的Y轴坐标的均值,rssji为第i个位置点接收的第j个AP节点信号强度的均值,rssj为该区域中k个位置点接收的第j个AP节点信号强度的均值,k为该区域位置点个数,D为AP节点个数。
在每个子区域中,D个AP节点的相关性系数向量表示为

若Pj>Pτ表示第j个AP节点与该子区域相关;反之,则不相关。选取相关的AP节点作为特征输入,进行定位模型训练。
基于分布式AP选择策略的定位算法的具体步骤:
1)将定位区域划分为m个子区域,根据式(7)计算每个AP节点与各个子区域的相关性,建立相关性系数矩阵;
2)选择相关性系数大于Pτ的AP节点,并将AP节点划分为m组;
3)在步骤(2)中AP节点分组的基础上,在每个子区域中,利用分组后的训练数据集训练DBN模型,构建定位预测模型;
4)在线预测阶段,获取移动设备接收的RSS指纹信息并作为输入向量,利用分区域模块选择对应子区域;
5)利用子区域中训练的定位预测模型估计目标的位置。
4 实验分析
定位数据的采集实验场景设于综合实验室内,数据采集设备为三星手机(I9228),系统为Android 4.1.2。实验室长约12.8 m,宽约12.5 m,高约3 m,室内布置有工位、电脑等办公用品,AP节点高度保持1.6 m。在该区域内,能够收集到25个AP节点的信号,部分AP信号的传播路径为非视距的,存在柱子的阻隔。将区域划分为144个小区域,每个小区域大小为1 m×1 m,以小区域中心为信号强度采集点。为保证样本数据的准确性,每个信号采集点获取600次AP信号集,每秒一次。
为不同子区域选择较优的AP节点,首先分析RSSI的分布特征,选择最佳的依赖特征计算相关性。在测试点上获取节点AP9的RSSI的五个分布特征如图2所示。
由图可见,均值、中值、最大值以及最小值的分布特征较相似,但是方差的分布特征变化无明显规律。因此,方差不能作为依赖特征。在缺乏足够信号样本的情况下,利用中值、最大值以及最小值来实时统计的定位效果明显次于均值的效果。因此,本文将信号均值作为依赖特征,计算子区域与AP节点的相关性。
本文在相同训练数据集的情况下,将所提DSAP算法与集中式SAP算法进行对比,实验结果如图3所示。由图可见,本文DSAP算法在不同的误差距离时,均具有较优的定位准确率,且明显优于集中式的SAP算法。
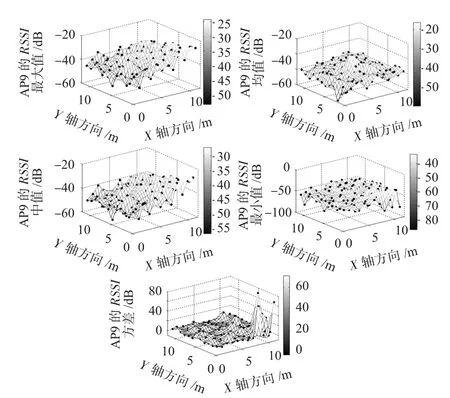
图2 AP9节点的五个信号分布特征图Fig 2 Signal distribution feature diagram of AP9 node with five characteristics
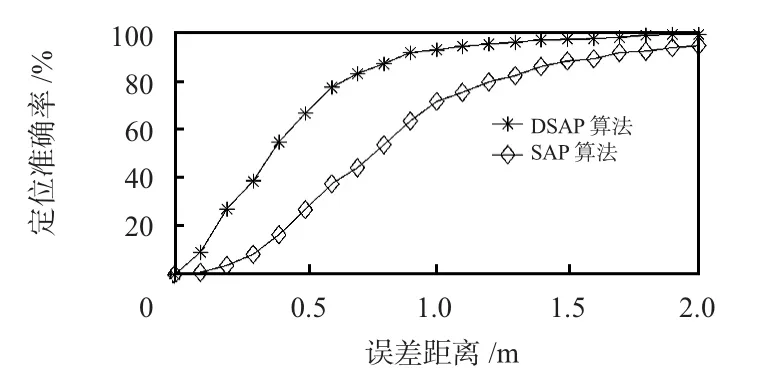
图3 DSAP算法与SAP算法在不同误差距离下的定位准确率Fig 3 Location accuracy of DSAP and SAP algorithms in different error distance
本文将预测位置与实际位置之间的欧氏距离作为定位预测误差,并将区域内位置点的平均预测误差作为算法评判标准。本文将DSAP算法、RADAR算法[6]以及BP算法在不同区域个数下进行对比,实验结果如图4所示。

图4 三种算法在不同区域个数下的平均预测误差Fig 4 Average prediction error of three algorithms in different number of regions
由图可见,随着区域个数增加,三种算法的平均预测误差呈递减趋势变化;本文DSAP算法在不同区域数的情况下,具有较低的平均预测误差且明显优于BP算法和RADAR算法。
在英特尔 i5处理器,2GB内存的 PC环境下,利用Matlab软件执行DSAP算法、RADAR算法以及BP算法,算法执行时间主要包括分区域模块执行时间和位置估计时间,其取值为测试数据运行100次所需时间的均值。三种算法在不同区域个数下的执行时间如图5所示。
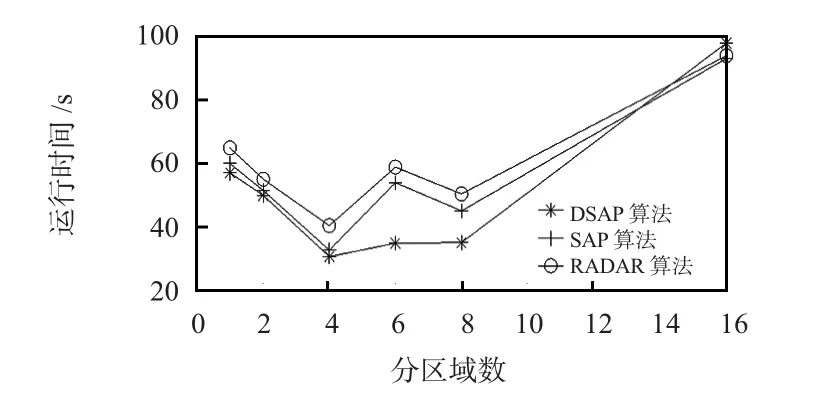
图5 三种算法在不同分区域个数下的运行时间Fig 5 Running time of three algorithms in different number of sub regions
由图可见,当区域数为16时,由于分区域模块执行时间较长,导致三种算法的运行时间明显增加;当区域数分别为6和8时,DSAP算法执行时间短且明显低于其它两种算法。由图4和图5可知,当区域数为8时,本文算法定位误差小且运行时间短,较BP算法、RADAR算法而言,平均定位误差分别降低了35.95%,46.78%,运行时间分别减少了22.8%,32.9%。
5 结论
本文提出了一种分布式AP选择策略,并应用于室内定位。针对定位模型的可伸缩性和定位区域内AP的非全可用问题,该方法将室内区域划分为若干个子区域,并计算子区域与AP节点之间的相关性,选取与该区域相关的AP节点作为该子区域的训练节点,最后通过DBN模型进行定位模型训练。该方法能够有效去除较大噪声和位置分辨能力弱的AP节点,降低了AP节点不可用的概率。实验表明:该算法较BP算法、RADAR算法而言,具有运行时间短且平均定位误差小的优点。但在复杂的室内环境中,采集有标记的训练数据将面临较大困难,今后重点将尝试利用半监督学习方法来训练未标记的数据,以提高其与预测能力。
[1]Dai Huan,Zhu Zhaomin,Gu Xiaofeng.Multi-target indoor localization and tracking on video monitoring system in a wireless sensor networks[J].Journal of Network and Computer Application,2013,36(1):228-234.
[2]孙中廷,华 钢,黄金城.基于进化理论的无线网络室内定位算法[J].传感器与微系统,2014,33(9):132-134.
[3]文春武,宋 杰,姚家振.基于RSSI校正的无线传感器网络定位算法[J].传感器与微系统,2014,33(12):134-136.
[4]刘军发,谷 洋,陈益强,等.具有时效机制的增量式无线定位方法[J].计算机学报,2013,36(7):1448-1455.
[5]Lin Tsungnan,Fang Shihhau,Tseng Weihan,et al.A group-discrimination-based access point selection for WLAN fingerprinting localization[J].IEEE Transactions on Vehicular Technology,2014,63(8):3967-3975.
[6]Bahl P,Padmanabhan V N.RADAR:An in-building RF-based user location and tracking system[C]∥Proceeding of the IEEE INFOCOM,New York:IEEE Computer and Communications Society,2000:775-784.
[7]Hinton G,Salakhutdinov R.Reducing the dimensionality of data with neural networks[J].Science,2006,313(5786):504-507.
[8]Chen Yushi,Lin Zhouhan,Zhao Xing,et al.Deep learning-based classification of hyperspectral data[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2014,7(6):2094-2107.
[9]Mohamed A R,Dahl G E,Hinton G.Acoustic modeling using deep belief networks[J].IEEE Transactions on Audio,Speech and Language Processing,2012,20(1):14-22.
[10]孙志军,薛 磊,许阳明,等.深度学习研究综述[J].计算机应用研究,2012,29(8):2806-2810.