基于局部脊波变换的SAR图像舰船尾迹检测方法
2015-12-07李健伟
江 源,李健伟
(海军航空工程学院 电子信息工程系,山东 烟台264001)
0 引 言
合成孔径雷达(SAR)是一种高分辨成像传感器,具有全天时和全天候的观测能力,在农艺、环境、水文、灾害、军事等领域得到广泛应用。近年来利用SAR图像进行海洋目标检测与监视的研究得到高度重视,在SAR图像上一般可看到船体和舰船的尾迹,船体比背景亮很多,而尾迹一般呈现出线形特征,而由于尾迹比舰船更大、更易区分且能估计舰船的位置、航速和航向,因此对舰船尾迹检测更具优势[1]。通常尾迹的检测主要通过检测直线的Radon和Hough 变换及其改进算法实现。
文献[2]最早使用Radon 变换对SAR图像中的线性特征进行增强和检测,Rey 等[3]人将其应用到尾迹检测,并结合高通滤波和Wiener 滤波进行。针对全局Radon 变换在复杂海况检测效果差的情况,张宇[4]提出一种局部Radon 变换,即在对像素灰度值积分过程中沿着线性特征被分割后的若干短线进行积分,而不是对整张图像进行积分,能够检测出由断续线段组成的尾迹。随着小波理论的发展,其在图像边缘检测中的应用也多了起来。邬烨文[5]提出一种基于小波变换的SAR图像舰船尾迹舰船方法,首先进行Radon 变换,再在变换域进行小波变换,检测出峰值点,然而由二维张量积张成的小波无法像脊波变换那样捕获图像中的线奇异。文献[6]提出了脊波变换的直线特征检测方法,崔蕾[7]将其用于SAR图像的尾迹舰船,取得较好效果,但仍存在全局Radon 变换的缺点。因此,本文在脊波变换的基础上提出一种基于局部脊波变换的SAR图像尾迹检测方法,该方法首先对待检测SAR图像进行分割,然后在小窗口内进行脊波变换,捕获线形特征,最后将点连成直线,检测结果证明了方法的有效性。
1 SAR图像舰船尾迹
20世纪80年代,世界上科学家开始展开对海上舰船目标的检测,在检测舰船目标的同时,科学家们发现舰船尾迹相比于舰船目标更容易检测,且舰船尾迹一般分为4 种:开尔文尾迹、湍流尾迹、窄V型尾迹和内波尾迹,SAR图像中的尾迹分类和特征如表1所示[8]。

表1 尾迹分类和特征Tab.1 Wake classification and characteristics
上述4 种尾迹中,除开尔文尾迹具有确定的理论模型外,其他3 种尾迹在SAR图像产生的机理目前还有许多争论与不确定之处。在光学图像上,运动船只产生的表面尾迹主要特征是湍流尾迹和一个的开尔文臂伸好几公里(Kelvin arms),湍流尾迹是较暗的拖尾,由湍流或涡流引起V型,如图1所示。

图1 尾迹分类及特征示意图Fig.1 Wake classification and characteristics signal
舰船尾迹的产生与船只自身因素、雷达的系统参数、海况条件有关。船只自身因素主要是指船体类型、发动机系统和船速等,目前尚没有文献对舰船本身因素具体是如何影响,只有一些文献简单描述了舰船航行速度对尾迹的影响。雷达系统参数是指不同波段、极化方式、观测模式产生的尾迹也不尽相同。例如L 波段的SEASAT图像上的尾迹特征比C 波段的ERS 或RADARSAT 明显;开尔文臂在入射角大时,可见性低等。除此之外,海况因素和海洋环境 (如层化条件)对尾迹检测的影响也大[9]。经过大量的观察发现,SAR图像上舰船尾迹有以下特点:尾迹是具有一定宽度的线性特征体;可能比背景亮,也可能比背景暗;不一定笔直,尽管舰船尾迹在短距离上是直线;图像具有相干斑噪声;图像可能存在其他非尾迹的线性结构。
2 尾迹检测方法
从目前查阅的文献看,尾迹的检测实际上都可以归结为通过尾迹和背景在能量上的差别进行检测,应用比较多的是Randon 变换(Hough 变换)及其改进。
2.1 Radon 变换及其改进
在二维欧式空间中,Radon 变换定义为[10]:

这里D 是坐标为x -y的整个图像平面,g(x,y)为在坐标(x,y)处像素的亮度,δ为Dirac 函数,ρ 指由原点至直线的法线距离,θ为直线的法线与x 轴的夹角。如图2所示。Dirac 函数的作用使得积分在直线上ρ=xcosθ + ysinθ 进行。

图2 Radon 变换原理Fig.2 Radon transform principle

图3 Radon 变换的坐标关系图Fig.3 Radon transform coordinate relations
Radon 变换的离散形式为:

Radon 变换的一个优点是由于积分过程在变换域中消除了噪声,变换域中的信噪比要高于原图像,另一优点是对于因自然因素引起的线性特征不会进行积分。但是对于SAR图像中以暗线特征呈现的航迹检测率较低,而且如果航迹相对于图像尺寸过于短小,在检测过程中很容易被噪声掩盖,同时也不能标记航迹的起点和终点,若尾迹有弯曲时,该变换也无法提供合理结果[4]。局部Radon 变换可以克服Radon 变换中的缺陷,实现方法有2个思路,一个是用相互重叠的窗口覆盖整幅图像,在每个小窗口进行Radon 变换;另一个是在全局进行Radon 变换,只不过通过限定积分的上下限方式来实现局部的Radon 变换[11]。
2.2 脊波变换
随着小波及多尺度分析理论的发展,以脊波变换为代表的检测尾迹的方法相继被提出。这里首先介绍一下脊波变换概念。
首先引入参数空间Γ={γ=(a,u,b):a,b∈R,a>0,u∈Sd-1}及记号,其中参数组γ=(a,u,b)中,a为脊波尺度;u和b 分别对应脊波的方向和位置。参数空间Γ 上的测度定义为,其中σd为d 维空间中单位球面Sd-1的表面积,du为Sd-1上的一致概率测度。用表示函数f的连续傅里叶变换:=∫f(x)e-jwtdt。这里考虑自变量x∈Rd,d ≥2 情形,并假设ψ:R →R 是Schwartz 空间中S(R)的函数[6]。
定义1:若函数ψ:R →R 满足

定义2:当令u = (cosθ,sinθ),x = (x1,x2)时,脊波函数为:
称变换:

为f(x)在R2上的连续脊波变换。
在图像里,Radon 变换把点和线是成对的关系,同理,小波变换和脊波变换也通过Radon 变换联系起来,那么Radon 变换与脊波变换关系式为:

脊波特有的降维能力能将直线型特征检测问题转化为点状特征检测问题。脊波变换可以分成2个步骤:当方向固定时,先进行Radon 变换,再进行小波变换,因此脊波变换具有Randon 变换能够检测出线性特征的特点。线性特征越明显(线较长且宽)则经过Randon变换之后得到点的能量越大,在进行小波变换时对应的分解系数值越大,对重建后的图像起得作用越大。图像的边缘是方向性很强的奇异性所在,脊波以其独特的捕获奇异性的特点,能够检测出图像中的线奇异,因此可以将其用于SAR图像中尾迹的检测。
3 基于局部脊波变换的尾迹检测方法
在SAR图像中检测尾迹,经典的方法是Radon变换和Hough 及其改进的形式,但是它们仅能有效地检测出较规则的、线性特征比较明显的尾迹,局部Radon 变换通过在局部窗口进行变换实现了检测尾迹长度的问题,受这一点的启发,结合方向信息检测的思想,在Rideglet 变换的基础上,提出了一种通过局部Radon 变换来实现局部脊波变换的方法,并将其应用到SAR图像舰船尾迹舰船的检测。
第1步:图像预处理,消除强散射体并对图像归一化。对原始SAR图像的预处理包括消除强散射点和图像标准归一化过程。这里把某个点3 乘以3邻域内的平均灰度值大于2.5 倍的整幅图像的平均灰度值的点视为强散射点,予以屏蔽(令其为整幅图像的灰度均值)。为了消除变换域中双X 状亮线的影响,对原始图像进行标准归一化,即

这里μ和σ为图像的均值和标准差,f(x,y)和g(x,y)分别为归一化前后(x,y)像素点的灰度值。
第2步:进行窗口划分。对目标图像进行光滑分割,在分割时要保证子块互相重叠,以免将线性特征分在2个子块。假设图像大小为N × N 点的,将其分为b×b 点的子窗口,这里将每行(列)分为2N/b个窗口,临近窗口有b/2 × b 大小的重复,通过这种划分,所有点都属于4个子窗口(不包括边界),但同时导致数据变为N × N ×4 点,这个需要在重建时对子块进行加权补偿。
例如4个窗口A1(i1,j1),A2(i2,j1),A3(i1,j2),A4(i2,j2)同时包含某一点(i,j),这里i1,j1>b/2,i2=i1- b/2,j2= j1- b/2。令


那么,重建之后此点的像素为:

这里ω(·)为权系数,ω(0)=1ω(1)=0,在0 处的导数为0,ω(x)+ ω(1 - x)=1。
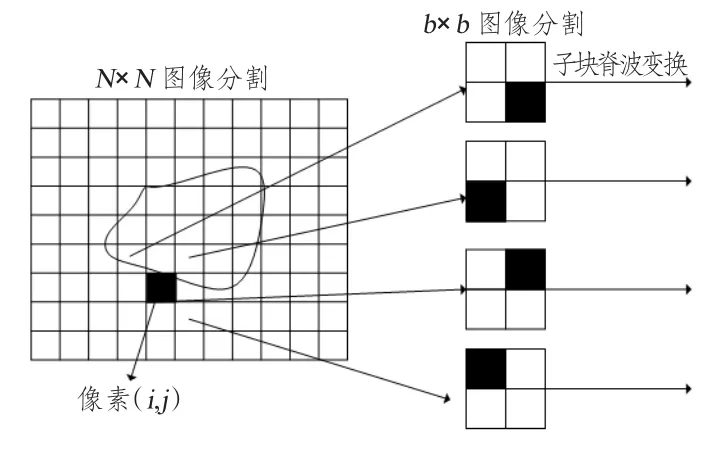
图4 图像分割示意图Fig.4 Image segmentation
按照上述方法将图像分为大小为2N × 2N的重叠块,其中任意一块窗口可以记为Ak(i,j)(1 ≤i ≤b,1 ≤j ≤b),这里,k为窗口的序号,取值范围为1≤k ≤P,P为窗口的个数,这里为2N ×2N个。
第3步:对窗口进行脊波变换(局部脊波变换)。将Ak(i,j)做Radon 变换,得到Bk(i,j)(1 ≤i ≤b,1 ≤j ≤b),变换之后有q=2b个方向,且任一q的点数为p = b。用Bk(i,j)的方差Tk来判别窗口内是否有线性特征,判定门限为T0(整幅图像的方差),将窗口分成有线性特征的(Tk≥T0)和没有线性特征的(Tk<T0),没有线性特征的就不需要进行Radon 变换,减轻了处理的数据量。对存在线性特征的窗口(Tk≥T0)Bk(i,j)进行脊波变换,令尺度3,得到的局部脊波系数为Ck0(i,j)…Ckm(i,j)(m = 0,1,2)。应用双线性插值把Ckm(i,j)扩充为3p ×3q,写作(i,j),这里1 ≤i ≤3q,1 ≤j ≤3p。用Gauss 光滑算子对(i,j)进行处理,写作(i,j)。
第5步:脊波重建图像,变成二值图像。重复以上步骤,得到线段以及对应窗口线段的交点,经过Bresenham 方法,找出连线上所有点的坐标。把所有的点显示成二值图像的形式。
4 结果和分析
在MatlabR2012b 软件环境下对以上算法进行仿真处理,对一幅含噪声的SAR图像的处理结果与其他检测方法的对比。在进行脊波变换时,选定的图像大小必须是素数,而且该值减去1 是2的整数次幂,因此这里选定图像的大小为257 像素乘以257像素。而子窗口也要同时满足上述条件,因此选择子窗口的大小为3 像素乘以3 像素。
模拟生成2 幅SAR图像,图5 是在风速等于2 m/s获取的,无噪声,图6 是在风速等于2 m/s 获取的,图像信噪比为10.5 dB。
这里先后用脊波变换和局部脊波变换对图像中的舰船尾迹进行检测,图7~图10 中分别为对应的检测结果。从检测结果可以看出,在无噪声时,虽然2 种方法都可以检测出尾迹,但是脊波变换由于只能对于较长长度的线性体才能有效捕获,因此检测结果不是很明显。而局部脊波变换能够检测断裂的线段,也能保持直线的基本方向,较准确地描述出舰船的尾迹。而当海况比较复杂时,如图6所示,脊波变换无法检测出舰船尾迹,而脊波变换能较好地检测出舰船尾迹。实验结果这说明了局部脊波变换相比于脊波变换能够在相对复杂的海况检测出由断续线段组成的尾迹,具有较强的适应性。

图5 无噪声的原始图像Fig 5 No noise of the original image

图6 信噪比为10 dB的原始图像Fig.6 Signal-to-noise ratio of 10 dB of the image
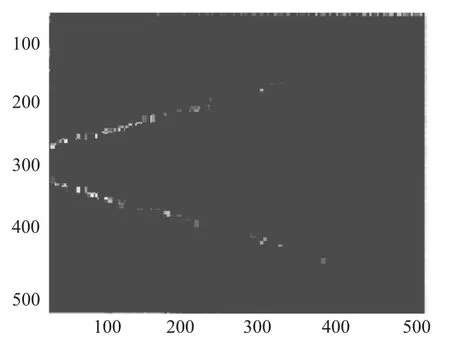
图7 图5的脊波变换检测结果Fig.7 The ridgelet transform test results of Fig.5

图8 图6的脊波变换检测结果Fig.8 The ridgelet transform test results of Fig.6
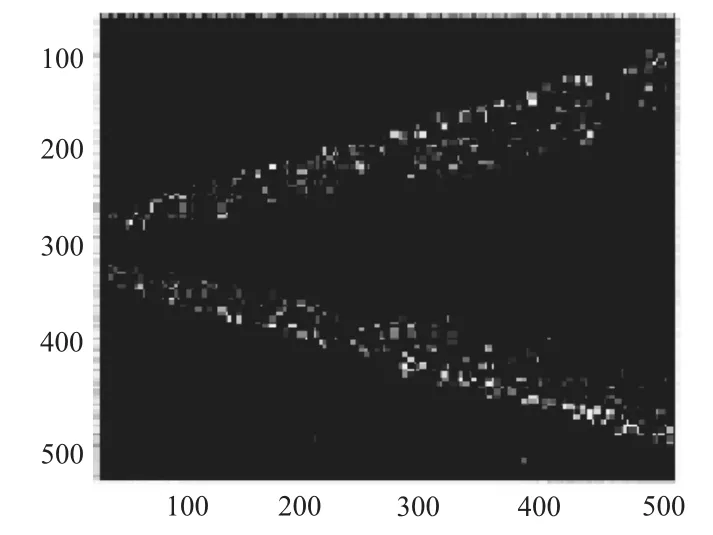
图9 图5的局部脊波变换检测结果Fig.9 The local et transform test results of Fig.5

图10 图6的局部脊波变换检测结果Fig.10 The local et transform test results of Fig.6
5 结 语
SAR 是完成海洋监视任务的重要手段之一,利用海面SAR 图象进行舰船尾迹检测具有重要的军事意义。传统尾迹检测方法如Radon 变换及其改进,只能捕捉到直线较长、较规则的尾迹,而对于实际图像中的由很多断续短直线组成的尾迹却无法有效地检测。因此,提出一种局部脊波变换的算法,首先将SAR图像进行窗口划分,其次在这些小窗口内进行脊波变换,最后将各个窗口内检测到的直线连在一起,仿真和实际数据表明,该方法检测尾迹的效果好。
[1]张晓燕,尤红建,付琨.基于Radon 变换的星载SAR图像窄V 尾迹检测[J].测绘科学,2009,34(2):112,118-119.
[2]MURPHY L M.Linear feature detection and enhancement in noisy images via the radon transform[J].Patern Rcognition Letters,1986.
[3]REY M T,et al.Application of radon transform techniques to wake detection in seasat-a SAR images[J].IEEE Trans.on Geoscience and remote sensing,1990,28(4).
[4]张宇,张永刚,黄韦良,等.一种利用SAR图像检测船舶尾迹的方法[J].国土资源遥感,2003(1):56-58.
[5]邬烨文.一种基于小波变换的SAR图像舰船尾迹检测算法[D].上海:上海交通大学,2009:30-41.
[6]侯彪,流芳,焦李成.基于脊波变换的直线特征检测[J].中国科学(E 辑),2003,33(1):65-73.
[7]崔蕾.SAR图像中舰船尾迹检测的研究[D].烟台:海军航空工程学院,2004,9:47-52.
[8]种劲松,欧阳越,等.合成孔径雷达图像海面舰船尾迹检测方法[M].海军出版社.
[9]HENNINGS,et al.Radar imaging of kelvin arms of ship wakes.INT.J.Remote Sensing,1999,20(13):2519-2543.
[10]COURMONTAGNE P.An improvement of ship wake detection based on the Radon transform[J].Signal Processing,2005,85:1634-1654.
[11]ANTHONY C C,et al.Localized radon transform-based detection of ship wakes in SAR images[J].IEEE Transactions on Geoscience and Remote Sensing,1995,33(7):35-45.
