一种船载水声定位系统标定方法研究
2015-12-07刘百峰
刘百峰,罗 坤
(中国人民解放军91388 部队,广东 湛江524022)
0 引 言
随着水下跟踪系统的迅速发展,水声定位系统的定位精度越来越受到人们的关注。但是由于海中基准点的建立一直比较困难,因而一直以来都是沿用理论分析精度,尚无有效的测试手段及相应的测试系统通过试验来测试标定其实际定位精度[1]。据此本文设计一种以试验船作为载体,在船上刚性安装一个水声换能器作为标校系统的海上基准点,水声换能器发射与被标校系统信号体制相同的水声信号,被标校的水声定位系统通过接收水声信号对海上基准点进行定位,或者测量其运动轨迹。同时标校系统根据自身的GPS 及方位姿态仪同步解算出海上基准点的绝对位置或运动轨迹,同被标校的水声定位系统的定位轨迹进行对比,即可对水声定位系统进行标校。也可对数据进行后处理,分析系统的定位精度[2]。
1 船载式标校系统平台
利用船体作为平台,对硬件安装要求很高,由于船体抗风浪的能力比较强,使得船载式标校系统能适应较为恶劣的海况;船载式标校系统模型如图1所示,合作信标安装在升降杆装置的圆柱杆顶端,工作时圆柱杆能穿过闸阀伸到船底以下某一深度位置,船上安装差分GPS 接收设备和方位姿态仪。用星站式高精度动态差分GPS和航向姿态测量传感器及深度传感器可精确标定作为模拟信标的发射换能器的大地位置坐标,从而为水声跟踪定位装备提供精确的目标声源位置[3]。GPS 天线安装在离升降机构水平距离最近的地方,这样可减小由于航向测量精度带来的基准位置的偏差。通过测量得到合作信标的安装点与DGPS 定位天线安装点的相对位置[4]。通过深度传感器可知道合作信标的布放深度,于是可以精确确定合作信标的大地位置。
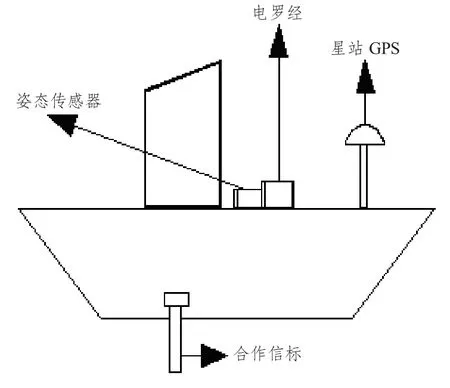
图1 系统在船上的安装示意图Fig.1 The sketch map of system fix on the ship
对此,建立3个坐标系即可求出合作信标的大地坐标,船上GPS 天线高斯坐标(X0,Y0,Z0);船体纵摇角α(船头向下为正),横摇角β (船右舷向下为正),航向角θ (与正北方向夹角,北偏东为正)[5]。
1)首先进行坐标系①到②的转换
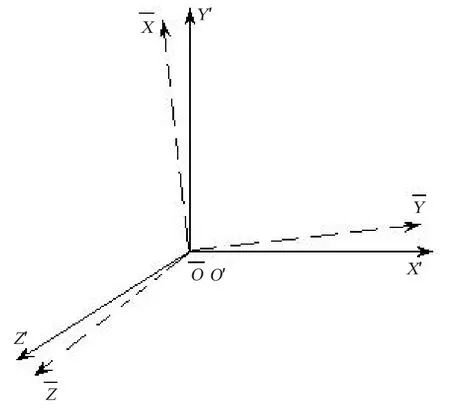
图2 坐标系①、②转换示意图Fig.2 The sketch map of coordinate ①to ②

表1 坐标系①、②坐标轴间夹角Tab.1 The angle between the coordinate system ①、②and axes
于是得到O′Z′=l·cosβ·cosα,Z′A=l·cosβ·sinα。
所以Z′ 轴与¯Z 轴夹角arccos(cosα·cosβ)。
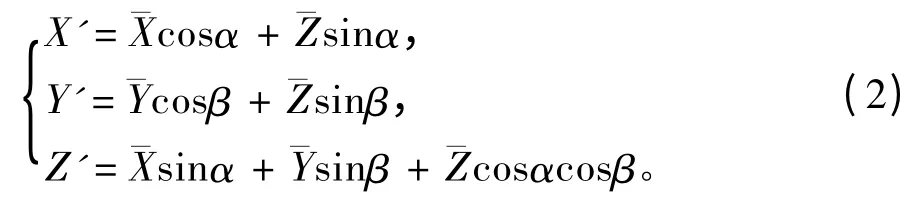
由表1 得到

得到坐标系①到②转换公式
2)坐标系②到③的转换
如图4 可得坐标系②、③转换公式
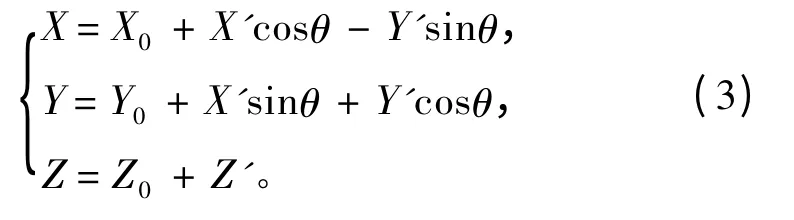

图4 坐标系②到③的转换Fig.4 The sketch map of coordinate ②to ③
2 结果分析
在南海某海域对某型导航定位系统进行精度标定试验,海底布放4个应答器,成矩形阵,相邻应答器间距离为3 500 m,深度为40 m 左右,目标船以小于4 kn 航速在阵中航行,发射声信号重复周期5 s,利用长基线水声导航定位系统对模拟目标船进行导航,同时和模拟目标的真实GPS 数据进行比较。
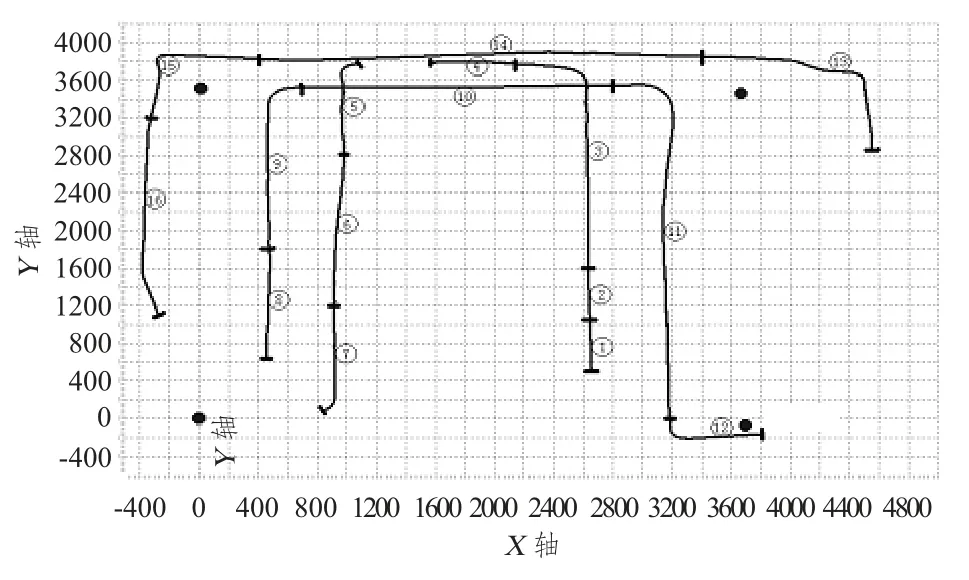
图5 某型系统对目标船导航定位轨迹Fig.5 The sketch map of compass measure direction error
根据前文所述方法由式(2)得到目标真实运动轨迹的时间序列(xk,yk),按照对应时间关系分别减去某型定位系统测量轨迹的时间序列(x′k,y′k),得到定位系统的测量误差[7],通过对各区域的测量误差进行分析,就可以认为考核出某型水声定位系统的近似精度值。利用某型目标导航软件解进行修正精度,对于系统对水下目标进行导航的真实性具有重要意义[8]。
从表2的精度结果数据可以直接看出该型系统在阵型内外不同区域的定位精度,在阵内时平均值(1~10)点大约为8.3 m,而阵外精度大于20 m,为系统试验数据的精确度提供有力证明,增强试验数据有效性。同时,针对在不同区域时系统的导航定位精度,可以对试验所需的最佳阵型和航路提供可靠参考和优化设计[9],从而提高试验结果的准确性。

表2 某型水声定位系统各区域精度结果Tab.2 The result of simulate platform measure direction error
3 结 语
利用船载式标校时,由于船载升降机构限制,发射声源只能布放在离海面10 m 以内的地点,同时船体经过多年航行,导致船体尺寸无法准确测量,就导致高精度动态差分GPS和航向姿态测量传感器的安装有很大偏差,从而影响到系统的标校效果。
[1]RAUREL.Long base-line acoustic tracking/positioning system.
[2]张宝成,魏新华,徐雪仙.水声跟踪系统时差法定位原理及误差分析[J].水声通讯,1987,1.
[3]杨青云.数据处理方法[M].北京:冶金工业出版社,1993.
[4]岳剑平.二维鱼雷水声跟踪阵的误差分析与仿真[J].鱼雷靶场,1994(3):9-19.
[5]杨化俊,编译.法国鱼雷弹道测量系统[J].鱼雷靶场,1993(3):51-56.
[6]王燕,岳剑平,冯海泓.双基阵纯方位目标运动分析研究[J].声学学报,2001,26(5):405-409.
[7]李启虎.水声学研究进展[J].声学学报,2001,26(4):295-301.
[8]惠俊英.水下声信道[M].北京:国防工业出版社,1992.
[9]王逸林.水下目标跟踪系统声学信号[D].哈尔滨:哈尔滨工程大学,2002.
