潜水环境噪声数据库设计与开发
2015-12-04方鹏
方 鹏
(长江职业学院,湖北 武汉430074)
0 引 言
近海海域是人类活动较多的海域,除了传统的航运、旅游活动之外,近年来随着科技的发展,越来越多的资源勘探和科学实验活动,也选择近海潜水水域作为实施场地。这些活动的开展往往需要依赖水声探测和通信技术,原因是在潜水环境中,水声探测技术具有较好的经济性和易用性。然而,潜水环境中人类的活动也相对较多,因而产生的各种水下环境噪声也比较复杂,如船舶航行噪声、渔业噪声等。这些噪声的出现极大地影响了水声探测、通信、声呐等技术的使用[1-2]。由于从源头杜绝这些噪声的影响不现实,因此,部分学者和企业希望通过了解潜水环境中的噪声特征,并建立相应的环境噪声数据库,为水声探测、通信、实验等活动提供参考,从而减小或消除环境噪声对水声技术的影响。
由于传统噪声收集设备的制约,建立的潜水环境噪声数据库往往难以对收集到的噪声数据进行进一步的处理,因此储存的数据类型单一,且多数为模拟信号,在实际使用过程中对于信号的比对和分析较为困难,实用性较低。同时,由于多数采用模拟信号的形式存储,导致需要的存储空间较大、存储介质较多,查询和使用非常不便,且缺少良好的用户界面,使得普通用户在缺少经验的情况下,很难对数据库进行操作[3-5]。
针对以上问题,本文结合信号处理技术和数据库开发技术,对潜水环境噪声数据库的设计和开发进行了研究,首先对噪声进行了数学建模,在此基础上提出了噪声信号处理方法,之后利用编程语言开发了具有良好用户界面的数据库系统。
1 环境噪声建模方法
潜水海域中,水下环境复杂多变,通常情况下环境噪声与普通的高斯白噪声有较大的区别。为了获得环境噪声的模型,首先需要对记录的噪声信号进行分析,环境噪声的分布为:

式中:Bi和Bj为全体振幅空间R 中互不相关的2个子空间;φ 为空集。
则环境噪声信号符合子空间分布的次数为:

式中:xk为第k个采样信号的振幅;M 为采样信号的总个数。
由式(2)可利用Kolmogorov 大数定律,获得其分布律为:

其中N 为划分子空间的个数。
从式(3)可知,当采样信号的个数或次数趋近于无穷时,每个子空间的宽度趋近于0,式(3)趋近于噪声信号分布的概率密度函数。此时,可以通过广义高斯过程来对水下环境噪声进行建模。
对于广义高斯过程来说,其均值为μ,方差为σ2,参数为c,则该过程的概率密度函数可以表示为:

则模型的参数a和振幅A 为:

其中Γ 为伽马函数,其定义为:

图1 为不同方差下广义高斯过程的概率密度函数。当c=2 时,概率密度函数与高斯过程相同;当c <2 时,概率密度函数图像变得更锐利;当c >2时,图像变得更平缓。
通过式(4)可以得到均值为0的广义高斯过程的奇数阶和偶数阶为:

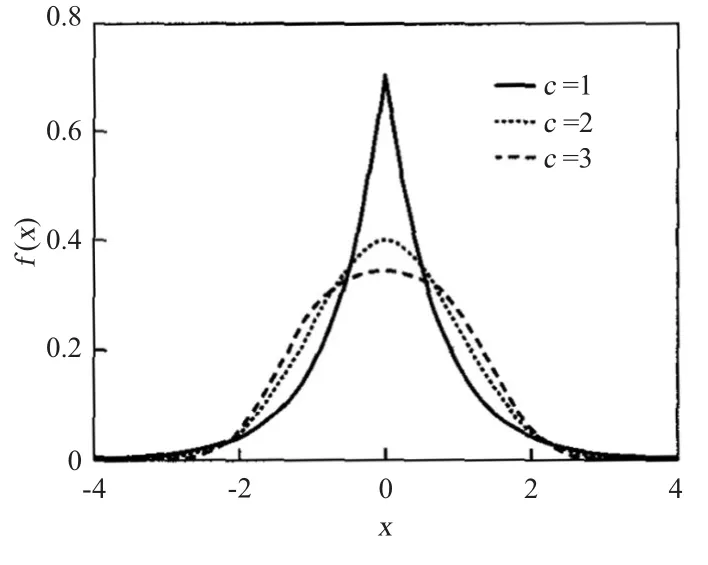
图1 不同c 值的概率密度函数Fig.1 Probability density function at different c value
由式(7)可得:

通过以上分析和建模过程可知,当采集的环境噪声样本数量较多,且没有显著的异化样本存在时,环境噪声可以被建模为广义高斯过程,图2 显示了建模值与实际值之间的差别。

图2 理论数据与建模数据误差Fig.2 The difference between test and theory value
利用不同海域的噪声信号数据,可以得到噪声的广义高斯过程特征值,通过存储这些特征值,可以重现噪声信号,因而为噪声信号的对比、分析等带来了便利,同时大大减少了存储的容量。
2 噪声数据库设计
本文设计数据库的主要功能之一为:允许用户利用不同的键值对数据进行访问。这些键值包括地理位置信息,如方向、经纬度等,也包括时间信息,如采集和存储的时间等。图2 为用户可用的键值,通过这些键值,用户甚至可以通过特定的地理信息,如海峡、海湾等获得其指定海域的全部环境噪声数据。用户可以利用以上信息,进行不同位置数据的比较和分析。

图3 数据库可用键值Fig.3 The available key of database
在数据库设计中,主要包括:①船舶实体:船舶的状态信息;②水文实体:包括洋流、水温等;③噪声实体:采集时间、海底地形、信号特征等。其中噪声实体是数据库中主要存储的信息,船舶实体和水文实体主要作为噪声信号的外界影响因素,在利用数据库数据进行对比分析时,考虑采集噪声信号时的船舶数据和水文数据,有助于更加精确地了解噪声信号的特征。
根据以上分析可知,数据库的结构如表1所示。
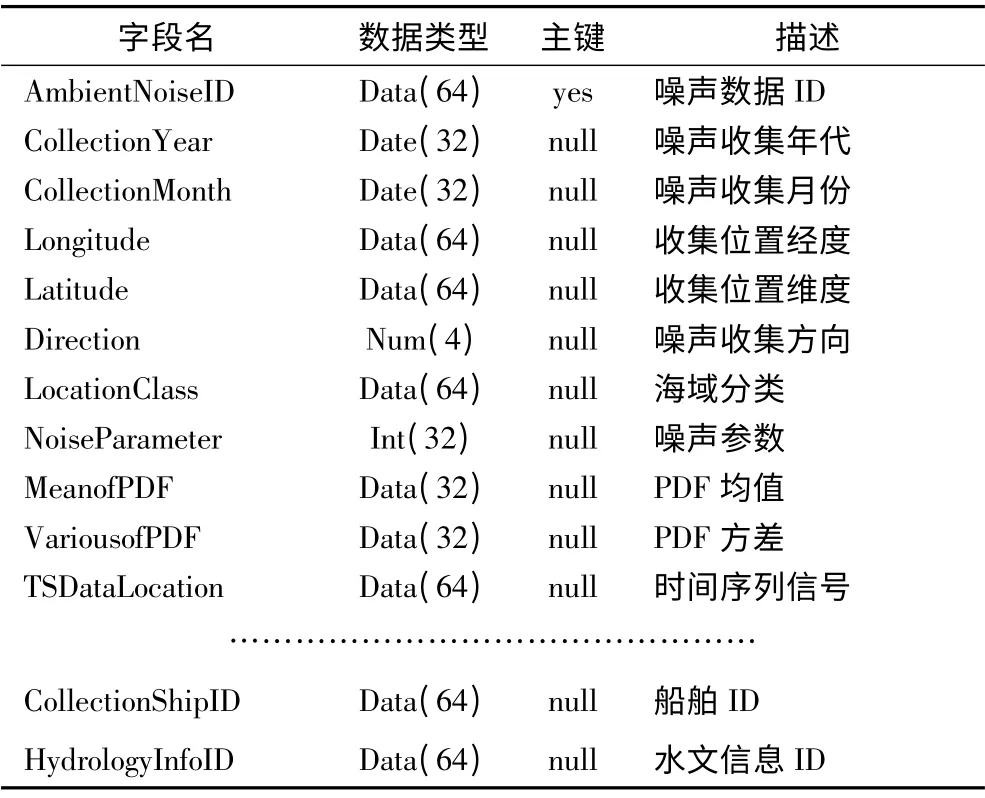
表1 数据库表tb_noise 结构Tab.1 The structure of the table tb_noise in database
从表1 知,从噪声信号本身的特征值,如功率谱密度函数参数、均值、方差,和时间序列信号、信号功率函数等信息,到噪声收集过程的特征,如收集的时间、地点、船舶、水文情况等,对噪声信息进行了详细的描述。

表2 数据库表tb_hydrology 结构Tab.2 The structure of the table tb_hydrology in database
通过表2 可知,在噪声采集的过程中不仅对于噪声信号本身进行采集,同时对采集过程的水文和气象情况进行了测定。由于不同的水文情况可能会导致噪声信号的特征、功率、传播衰减产生变化,因而在对信号进行分析比对,或进行噪声滤波时,参考相应的水文情况,将使以上过程更加科学和精确。
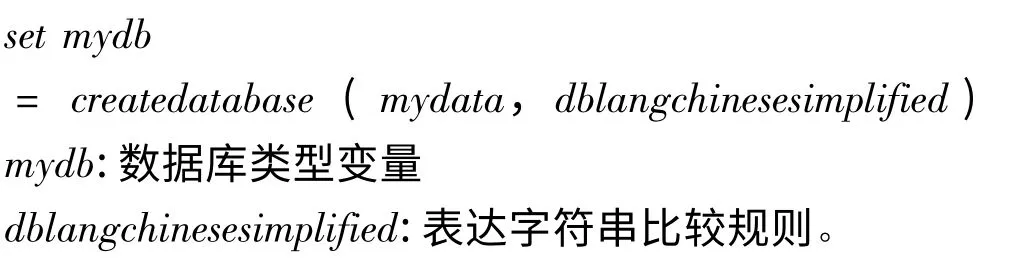
本文设计的环境噪声数据库由VBA (Visual Basic Application programming language)语言开发。常用的数据访问接口有3 种:数据库访问对象(Data Access Object,DAO)、远程数据库对象(Remote Data Object,RDO)和ActiveX数据对象(ActiveX Data Object,ADO)。本文采用数据库访问对象方法。其中创建DAO 对象库的引用代码如下所示:

利用CreatTabDef 方法创建数据表的代码如下:
3 数据库实现
潜水环境噪声数据库由VBA 语言开发。VBA是当前使用较为广泛的编程语言之一,其优势在于能够提供较为友好的用户界面,如图4所示。本文开发的数据库主界面基于地理信息系统 (GIS)ArcMap,在主界面上显示有一个添加了超链接的地图,通过该地图能够直观的选取相应的海域,调用相关的功能了解该海域的环境噪声信息。

图4 数据库界面图Fig.4 The interface of the database
采用微软Access 作为数据库的实现平台。在数据库中存在有3 张表,第1 张表存储的为水文信息,描述的是噪声采集时的水文情况和气象情况;第2张表存储的是噪声采集船舶和设备的信息;第3 张表存储的为噪声的属性,描述的是在相应坐标位置,潜水噪声的元数据。元数据中包含了噪声的具体特征、噪声采集的时间等属性。
图5 为环境噪声数据的处理流程。由ARL 设计开发的噪声收集系统(Pop-up Ambient Noise Data Acquisition System,PANDA)[6]负责收集和探测环境噪声,通过PANDA 实现噪声采集之后,相应的噪声信号由一个Matlab数据处理程序进行进一步处理,该处理程序通过分析噪声信号得到该信号的功率谱密度和随机分布函数;之后,噪声信号经过处理之后得到信号特征值,并将该特征值存储入数据库中。在存储过程中,系统会为新存储的噪声数据建立新的目录,然后对数据库索引进行更新。
除此之外,对于环境噪声数据,数据库还提供了不同类型的数据格式,如时间序列、声谱图、功率谱、功率谱密度等。一旦用户确定了查看数据的具体格式,可在GUI 上通过点击play 按钮来重放相关的噪声信息。除了通过设备收集噪声之外,数据库还向用户提供了利用外部设备导入噪声信息的方法,一旦数据被导入数据库,则该数据会像原始数据一样得到处理和利用。
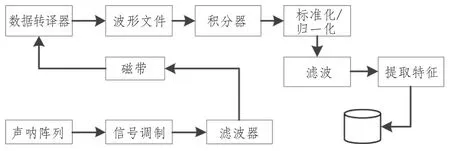
图5 PANDA 噪声收集方法Fig.5 PANDA ambient noise collectionmethod
4 结 语
针对传统潜水环境噪声数据库采用储存模拟信号进行分析比对的弊端,本文设计了一种基于噪声建模和Access的潜水环境噪声数据库。通过对于噪声信号的分析,将信号建模为广义高斯过程,利用广义高斯过程的参数、均值、方差等特征值来描述和重现噪声信号,大大简化了数据的表示和存储过程。
在此基础上,设计了数据库的结构,不仅对于噪声信号本身的特征,以及采集时间、位置等信息进行存储和记录,同时还对采集过程中的水文信息、船舶信息进行了测定和记录,提高噪声数据的完备性,确保噪声数据使用的科学性和精确性。
最后,利用VBA 编程语言和ArcMap 地理信息开发系统,在Access 平台上实现了本文设计的数据库,不仅向用户提供了良好易用的操作界面,同时提供了多种格式数据查询、数据上传等功能,具有较好的实用性。
[1]URICK R I.Ambient noise in the sea[M].Lor Allos:Peninsula Publishing,1986:599-612.
[2]CATO D H,BELL M J.Uluasonic ambient noise in avstralian shallow waters at frequenciesup to 200 kHz[C]//DSTO report MRL-TR-91-23.
[3]PATTER J R,LIM T W,CHITRE M.Acoustic imaging &the natural soundscapein singapore water[J].DSO- NUS Joint R&D Seminor,1997(12):167-173.
[4]赵汉波,郑援,蒋斌.多个线谱噪声的局部区域有源消声[J].舰船科学技术,2014,36(4):58-62,65.
[5]陈剑,鲁民月,庞天照.潜艇噪声水平对声呐探测性能影响分析[J].舰船科学技术,2009,34(12):22-25.
[6]KOAY T B,POTTER 1 R,JOHANSSON T,et al.PANDA;a self-recoveringshallow water acoustic logger[C]//Oceom 2001 MTS/IEEE Conference and Exhibition,Hawaii,2001(3):229-236.
