海上多跳无线自组网路由协议仿真研究
2015-12-04罗尚平刘才铭黄陈英
罗尚平,刘才铭,黄陈英
(乐山师范学院 计算机科学学院,四川 乐山614004)
0 海上多跳无线自组网
由于恶劣的自然环境和通信条件,卫星通信往往是海上通信的唯一手段,同时价格高达地面通信的30 倍左右,高昂的成本制约了海上通信的发展,为航运和军事等行动造成障碍。为了提高海上通信的经济性,迫切需要有一种价格低廉且效率较高的通信方式,正是在这种背景下,无线自组网络被引入海上通信,并逐渐成为近年来海上通信领域研究的热点。然而,无线自组网的设备功率有限,通信范围仅仅能够覆盖船舶周边几公里,因而通常只能用于近海海域和海峡之中,本文关注的就是在狭窄海域中,海上多跳无线自组网的路由问题。
在狭窄海域中应用多跳无线自组网,具有以下特点[1-2]:
1)当船舶在狭窄海域行驶时,船舶数量较多,需要严格按照既定的航线,以免发生碰撞事故;
2)如果将每艘船舶看作无线自组网的通信节点,那么整个海上多跳无线自组网将拥有一个较为稳定的拓扑;
3)在地面无线自组网中,无线通信节点往往独立,因而存在供电问题,而安装在船舶上的通信设备则不存在该问题;
4)船舶通过GPS和GALILEO 系统获得精确的位置信息,并通过AIS 实时通报自己的航向、位置等数据。
5)相对来说,船舶的移动性较为稳定,难以在短时间内改变航向或航速;
6)海面通信状况不确定性较大,可能会造成波闭塞效应或通信延迟等现象。
根据以上分析,本文的目标在于提供一种可靠和高效的海上多跳无线自组网路由协议。对于海上无线自组网的路由协议,相关的研究成果较为丰富,在文献[3]中提出了一种基于位置的路由方法,这种方法不需要发布和维护具体的路由信息,因而具有较高的效率,然而其对于海面的通信环境考虑并不充分,没有其他的机制保证海上的通信质量;在文献[4]中,作者证明了在海上通信中,担心无状态路由的性能表现要由于动态源路由,并且其差距随着跳数的增多逐渐增大,同时在文献[5]中,作者提出了一种基于拓扑已知的QoS 路由方法,但是并未将海上通信的特点考虑进去,实用性较低。
本文通过对海上通信过程的研究发现,当海面条件恶劣时,由于通信链路的条件变差,对于丢失的数据包进行重传难以实现数据的可靠交付。同时,本文发现在海上通信过程中,数据往往需要经过多于一跳才能到达接收端,同时当无线节点进行数据传递时,往往存在多于一个对象可以交付数据。正是基于以上分析,本文提出了一种基于虚节点的路由方法,如图1所示。
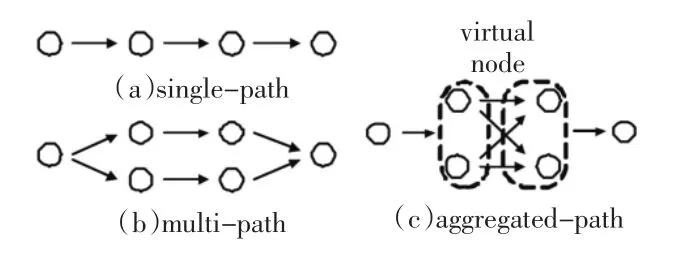
图1 无线节点链路Fig.1 Wireless node path
图1(a)中显示的是传统单一路由通信方式,图1(b)中显示的多路由通信方式,图1(c)显示的是本文提出的集成路由组织方式,将多个节点组织为虚节点,并通过虚节点之间的路由,增强数据传递过程中路由的冗余性和可靠性,从而解决通信效率和海上干扰问题。
1 系统模型
本文将从海上通信链路和船舶移动性2个方面进行分析和建模。
1.1 海上通信链路建模
在海上通信过程中,常常会遇到较恶劣的天气情况,当浪高达到一定高度时,很可能会阻塞无线通信链路,这种现象叫做波闭塞[6]。对于波闭塞的相关研究较少,本文针对该现象建立模型如图2所示。
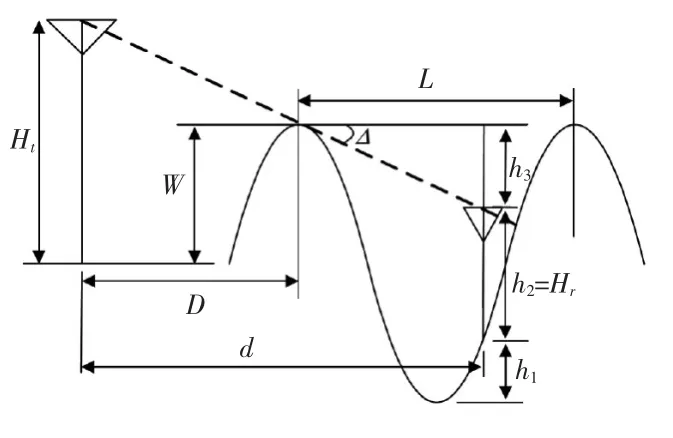
图2 海上通信链路模型Fig.2 The model of marine communication link
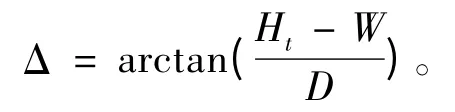
在图2 中,纵轴表示海拔高度,横轴表示海浪、无线接收天线之间的相对距离。Δ 决定了无线通信链路与浪高之间的关系,当Δ=90°时,波闭塞现象不存在;当Δ=0°时,波闭塞现象最为严重。Δ的值由天线与海浪的距离D 以及天线的高度Ht决定,假设发送和接收天线间距离d 远大于海浪波长L,则D≈d,则可得:
同时考虑地球表面的曲率,接收天线的有效高度为Hr,如图3所示。

图3 天线的有效高度Fig.3 The effective antenna height
则发生波闭塞效应的时间为以下方程组的解:
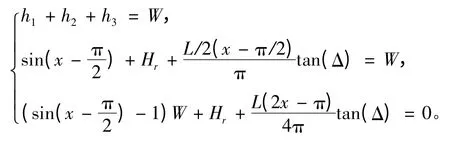
式中:h1为天线与浪高的高度差;h2为接收天线高度;h3为接收天线与海浪的水平距离;x 为发生波闭塞效应的时间。
通过以上数据建模,可以确定波闭塞的时间,将通信链路描述为2个状态的马尔科夫链,状态“O”表示波闭塞, “C”表示通信正常。令λ 为由状态O 到C的转移概率,μ 为状态C 到O的转移概率。则二者的计算方法为:

式中:R 为发送的包长;to为波闭塞持续时间的期望;tc为通信正常时间的期望。
然而在实际通信过程中,由于海面的波动,还可能造成无线信号的发射,多径到达和干扰等情况。为了描述以上情况,再次采用2个状态的马尔科夫链,状态“G”为传输的包均成功到达,“B”为传输的包均未成功到达。令α 为由状态B 到状态G的转移概率,β 为状态G 到B的转移概率。则二者的计算方法如下:

式中:Nr为每秒中传输成功的期望;RB为链路在状态B下,每秒平均传输的包的数量;RG为在状态G下,每秒平均传输的包的数量。同时根据文献[8],有如下描述:

式中:fc为载波频率;ρ 为链路信噪比的期望。则可将通信链路抽象为4个状态的马尔科夫链,如图4所示。

图4 通信链路的马尔科夫模型Fig.4 The Markov model of communication link
图4 中共有4个状态:即{O/B ,C/B ,O/G ,C/G},在4个状态中只有状态C/G 有效,不失一般性地,可以将该4个状态的马尔科夫链简化为2个状态的马尔科夫链,如图5所示,状态G*表示原状态C/G,B*表示其他3个状态的集合。
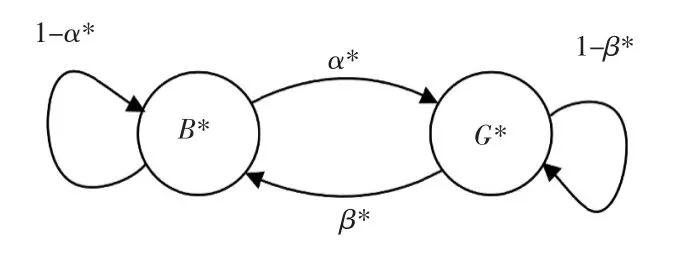
图5 简化的通信链路模型Fig.5 Simplified model of communication link
其中二者的转移概率为α*和β*,令保持G*的概率为SG,则可得以下计算公式:
式中:Tg为状态C/G 持续的时间期望;Tb为非C/G 状态持续的时间期望。
1.2 船舶移动性建模
在船舶移动性建模中,将使用来自AIS的实际数据,如图6所示。

图6 AIS 位置数据Fig.6 AIS location data
基于以往的船舶移动性数据,我们确信当船舶与岸基基站相距15 km 之内,船舶之间相距8 km时,能够有90%的船舶在90%的时间内与基站和其他船舶联网,形成一个具备相当灵活性的船舶移动自组网。在这种自组网中,一个船舶与基站之间,总有至少2个船舶提供信号的中继,这一数据的平均值为1.8。则基于以上分析,可以按照图1所示,实施本文提出的路由方法。
2 集成路径路由
令M 为一个数据包在端到端链路中允许的最大跳数。本文提出的路由方式,不是按照固定的路由传输数据包,而是如图1所示,在传输过程中,在不同的跳数上,在不同的节点间分布路由。
在每一跳中,一个虚拟节点为一组在一跳传输距离内的节点的集合。在本文中,将使用一种经过修改的AODV 协议实现路由的实际过程[7]。
协议的步骤描述如下:
1)首先,源节点向周边节点发送路由请求;
2)周边接收到请求之后,将自动形成虚节点,在这一过程中,可能不止一个节点收到请求,这些收到请求的节点均属于统一虚节点;
3)虚节点继续发送路由请求,若无法到达最终的目的节点,则仍然会有若干节点收到该请求,这些节点组成另一个虚节点;
4)递归地进行步骤3,直到某些节点能够将消息交付目的节点,这些节点组成最后一个虚节点,此时,各个虚节点之间的路由已经确定;
5)此时,从源节点发送数据到第1个虚节点,此时第1个虚节点内的所有节点收到消息,并分别向第2个虚节点中的每个节点分发消息,递归地进行该过程,直到最后一个虚节点将消息发送给目的节点。
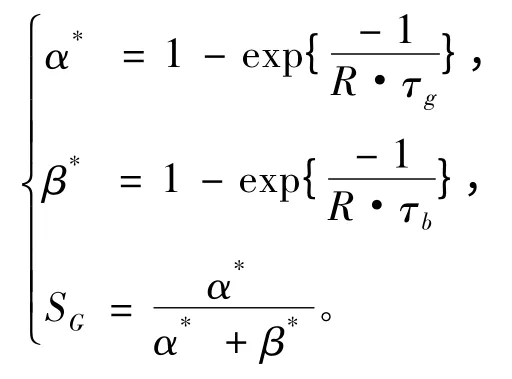
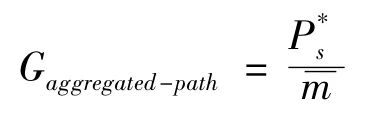
令H 为集成路径路由中的跳数,Ni为第i个虚节点中真实节点的个数,i=0,1,2,……,H。N0和NH分别为源节点和目的节点,假设在一个路径上只有一个源节点和目的节点,则可得:
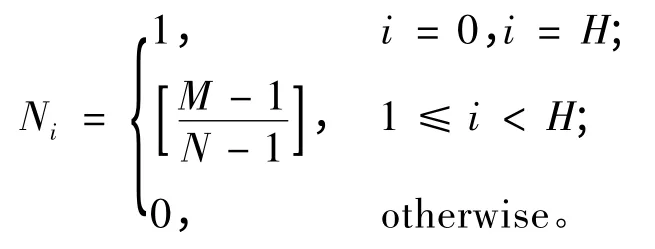
则可得在集成路径路由下,成功传输概率为:
式中:P*为H 跳中,端到端传输成功的概率;m 为每个数据包在传输过程中跳数的期望。其中可知:
式中:f(i)(j)为在第i 跳中,至少有j个节点接收成功的概率。其中:

其中pi为经过第i 跳之后,数据包传输成功的概率。且

则可得集合路径路由的发送可靠概率为:
3 性能仿真
在仿真中,采用一个基于时隙的MAC 协议,在该协议中,将5 ms的MAC 帧划分为256个时隙,每个时隙对应1个数据包。
在仿真中,假设路由协议不需要在安装过程耗费时间,并不需要维持相应的链路信息,因此,可以分析路由协议的实际工作性能。
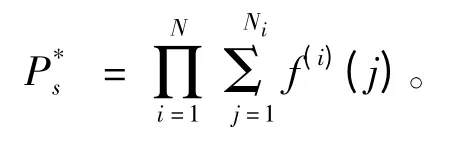
在仿真过程中,数据包以指数分布到达,图7~图9分析了集合路径路由和单路径路由之间的性能。
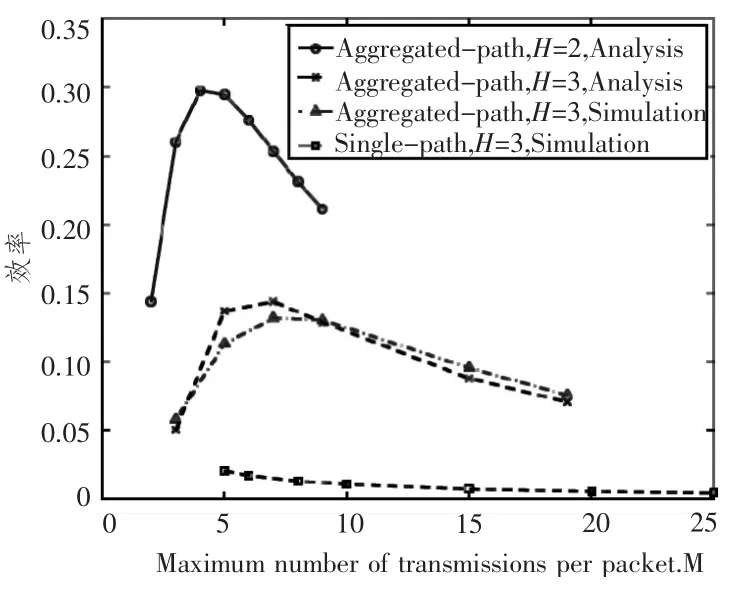
图7 集合路径路由的效率Fig.7 Efficiency of aggregated-path route
图8 单一路径路由的效率Fig.8 Efficiency of single-path route

图9 丢包率对比Fig.9 The comparation of drop ratio
图7和图8 表明,集合路径路由相比单一路径路由,有着更好的链路利用率和效率,尤其在海况较恶劣的情况下,该优势将更加明显。图9 表明,在丢包率方面,集合路径路由同样有着较好的性能。以上结果证明了本文提出的方案具有较好的可行性和高效性。
4 结 语
在海上通信过程中,由于波闭塞效应的影响,通信链路常常会失去连接,导致传统的重传机制无法发挥作用。本文提出了一种集合路径路由方法,通过对通信链路和船舶移动性的建模,该方法通过将节点组织为虚节点的形式,在每一跳中向每个虚节点中的节点分发路由信息和消息,保证了消息传输的可靠性和稳定性。最后,本文采用仿真模型,证明了相比与传统的单一路径路由,本文提出的方法在性能上更优,具有较好的可行性和高效性。
[1]FRIDERIKOS V,PAPADAKI K,DOHLER M,et al.Linked waters[M].IEE Communications Engineer,2005:24-27.
[2]MORENO M T,KILLAT M,HARTENSTEIN H.The challenges of robust inter-vehicle communications[C]//IEEE VTC,2005:319-323.
[3]MAUVE M,WIDMER J,HARTENSTEIN H.A survey on position-based routing inmobile ad hoc networks[M].IEEE Network,2001:30-39.
[4]FUBLER H,MAUVE M,HARTENSTEIN H,et al.A comparison of routing strategies for vehicular ad-hoc networks[C].Technical Report TR-02-003,Germany:Mannheim,2002.
[5]XUE Q,GANZ A.Ad hoc QoS on-demand routing(AQOR)inmobile ad hoc networks[J].Journal of Parallel and Distributed Computing,2003:154-165.
[6]GE Yu,KONG Peng-yong,THAM K C.Connectivity and route analysis for a maritime communication network[C].IEEE ICICS,2007:289-295.
[7]汪陶先,欧新建.舰船通信与电子系统一体化集成技术研究[J].舰船科学技术,2008,30(Z1):111-115.WANG Tao-xian,OU Xin-jian.Research on integration techniqlles of shipboard communication and electronic system[J].Ship Science and Technology,2008,30(Z1):111-115.
[8]SMITH S,KOLAR R,VARLEY R F.WetNet:a multi-client marine communication network.MTS/IEEE Oceans,2002(10):637-644.
