改进粒子群算法的PID神经网络解耦控制
2015-12-03于立君陈佳刘繁明王辉
于立君,陈佳,刘繁明,王辉
(哈尔滨工程大学自动化学院,黑龙江哈尔滨150001)
改进粒子群算法的PID神经网络解耦控制
于立君,陈佳,刘繁明,王辉
(哈尔滨工程大学自动化学院,黑龙江哈尔滨150001)
综合减摇控制系统存在非线性、多变量、强耦合等因素,会导致减摇系统达不到最佳控制状态。利用粒子群算法具有对整个空间进行高效搜索以及PID神经网络的自适应特点,提出一种改进粒子群算法,以解决粒子群算法中存在算法精度不高、粒子易陷入局部极小值等问题,并提高PID神经网络训练速度和训练精度,便于参数寻优。仿真结果表明,改进的粒子群算法具有一定优越性,将其运用到综合减摇控制系统解耦控制器设计中,能够有效地减小船舶横摇,达到较好的控制效果。
粒子群算法;综合减摇系统;PID神经网络;解耦控制;仿真分析
综合减摇控制系统具有非线性强、控制变量多、耦合性强、结构复杂且时变等特点[1],这些因素的存在使得传统控制器在系统应用中有一定的局限性,其应用的有效性也会受到很大的限制。因此,选择合理的解耦控制算法并有效地应用到控制器设计中[2],将在很大程度上提高多变量耦合系统的控制效果。近年来,由于粒子群算法具有易实现、通用性强、收敛速度快等特点,被广泛应用到各个领域中[3⁃5]。同时针对标准粒子群算法存在的缺陷,为了提高粒子群算法的性能,国内外研究学者在算法的惯性权重、加速度系数因子等方面提出了许多改进方法。胡建秀等[6]提出了一种线性微分递减策略方法,用以提高算法的收敛速度。但是该算法会在迭代过程中出现进入局部极值区域就难以跳出的问题。陈水利等[7]提出了一种非线性调整加速度系数因子的策略,可使算法以最快速度搜索到最优解所在的区域。经过验证该方法能够得到较理想的效果,但是由于后期种群的多样性的丧失,容易造成早熟收敛。Alireza[8]在传统粒子群优化方法的基础上提出了具有适应变异机制和动态惯性权重系数的算法,以增强算法的全局搜索能力,并提高准确性。算法对动态权重的惯性系数进行了改进,却没考虑加速度因子对算法的影响。本文针对上述改进粒子群算法中仍然存在的问题,提出了一种新的改进时变加速度系数的粒子群算法,将该算法与标准粒子群算法进行比较,并应用到综合减摇控制系统解耦控制器设计中,验证了改进算法的有效性。
1 综合减摇耦合系统数学模型分析
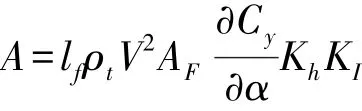
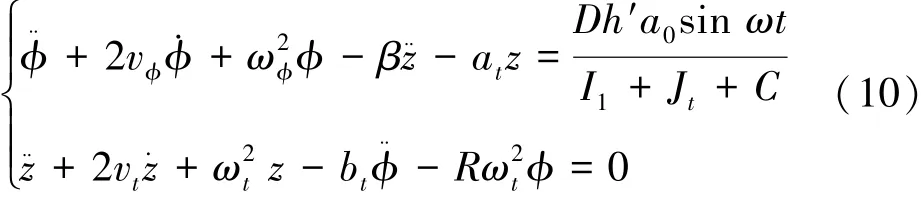
综合减摇控制系统中,当横摇角较小时,可以把船舶—减摇水舱系统看作是一个受激励的二自由度振动系统,把减摇鳍的扶正力矩Kc=Aϕ+Bϕ·+Cϕ¨引入到该系统,可以建立综合减摇系统运动的微分方程[9⁃10]:
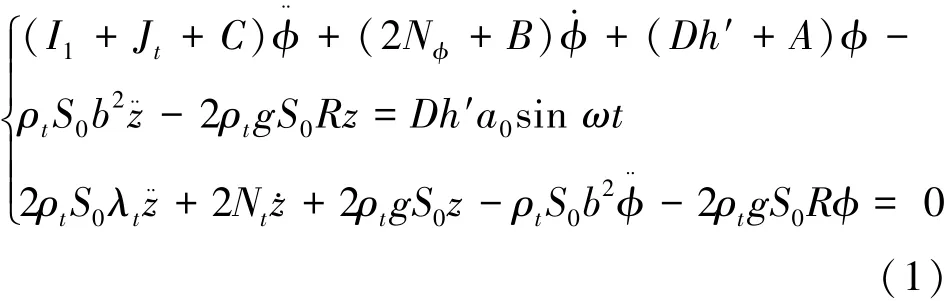
式中:I1=I+ΔI,I和ΔI分别为相对于过船舶重心的纵轴惯量和附加惯量;2Nϕ为船舶阻尼力矩;D为排水量;h′为稳心高;S0为边舱自由液面面积;S为沿水舱轴线的法线方向的局部截面积;r为微质量dm的质心到横摇轴的距离;γ为r与d之间的夹角;dl为液体微体积沿水舱轴线的长度;l为型水舱轴线长度;为舱内水柱相当长度;b2=为水舱轴线对横摇轴的静压力矩;Jt=为舱内液体对横摇轴的质量惯性矩;R为边舱中至船舶纵中刨面的水平距离;Nϕ为船舶阻尼系数;ρt为海水密度;V为航速;Af为鳍的投影面积;∂Cy/∂α为升力系数斜率;
对式(1)进行无量纲化可得

由式(2)可以看出综合减摇控制系统中存在着耦合项,而这种耦合影响是由船舶横摇角ϕ及它的二阶导数ϕ¨所引起的。因此,需要选取合适的控制算法对系统进行解耦控制,进而消除减摇系统中存在的耦合影响,达到提高综合减摇系统性能的目的。
2 改进粒子群算法的PID神经网络解耦控制
2.1 改进粒子群算法
改进粒子群算法分析步骤如下。
粒子群的进化方程[11]可描述为

式中:ω为惯性权重,描述的是粒子上一次运行速度对当前次运行速度的影响[12]。Vi(t)表示第i个粒子在第t次迭代过程中的速度矢量,Xi(t)表示第i个粒子在第t次迭代过程中的位置矢量,pbesti(t)、gbesti(t)分别代表第i个粒子在第t次迭代后该粒子的历史最优点和种群历史最优点。方程中参数t为迭代次数,r1、r2为[0,1]的随机数,用来保持种群个体的多样性[13]。c1、c2为加速度系数因子,可以使粒子向自己的历史最优点和种群历史最优点靠近,通常取值在0~4之间。
Ratnaweera等[14]、乔俊飞等[15]提出了一种参数自调整策略,在进化过程中,通过调整加速度系数动态调节算法的局部和全局搜索能力。对于时变加速度系数,调节公式定义如下:

式中:c1i、c1f、c2i和c2f均为常数,t是当前的迭代次数,Tmax是最大的迭代次数。
本文在此基础上做如下修改,提出一种改进的时变加速度系数的粒子群算法,定义加速度系数公式如下:

式中:c1i和c2i分别是加速度系数c1和c2的初始值。c1f和c2f分别是加速度系数c1和c2的最终值。则改变加速度系数后,粒子群算法更新方程如下:

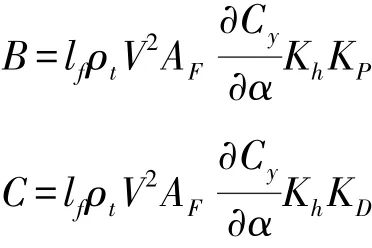
改进粒子群算法流程如图1所示。
图1 改进粒子群算法流程Fig.1 The flow chart of improved PSO algorithm
2.2 改进粒子群算法的综合减摇系统PID神经网络解耦控制
选取式(2)为综合减摇系统模型进行分析,相应的系统参数如表1所示,并对式(2)进行变换得
对式(10)进行Laplace变换并整理可得
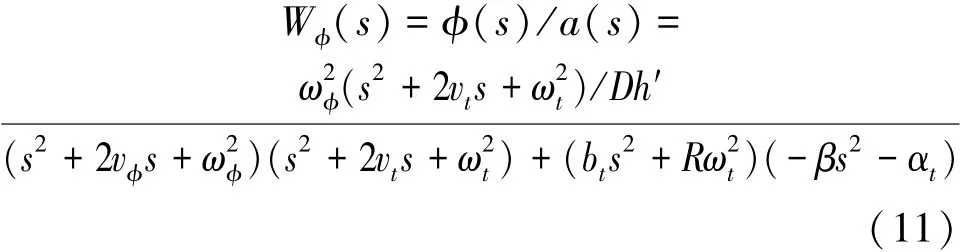
根据表1中的数据可以得到该减摇系统具体表达式为

本文选取综合减摇控制系统性能指标函数为

式中:Ei为输出横摇角的误差平方和,φr(t)为预测输出横摇角,φo(t)为实际输出横摇角,n为训练样本数。粒子群中个体的适应度函数选为

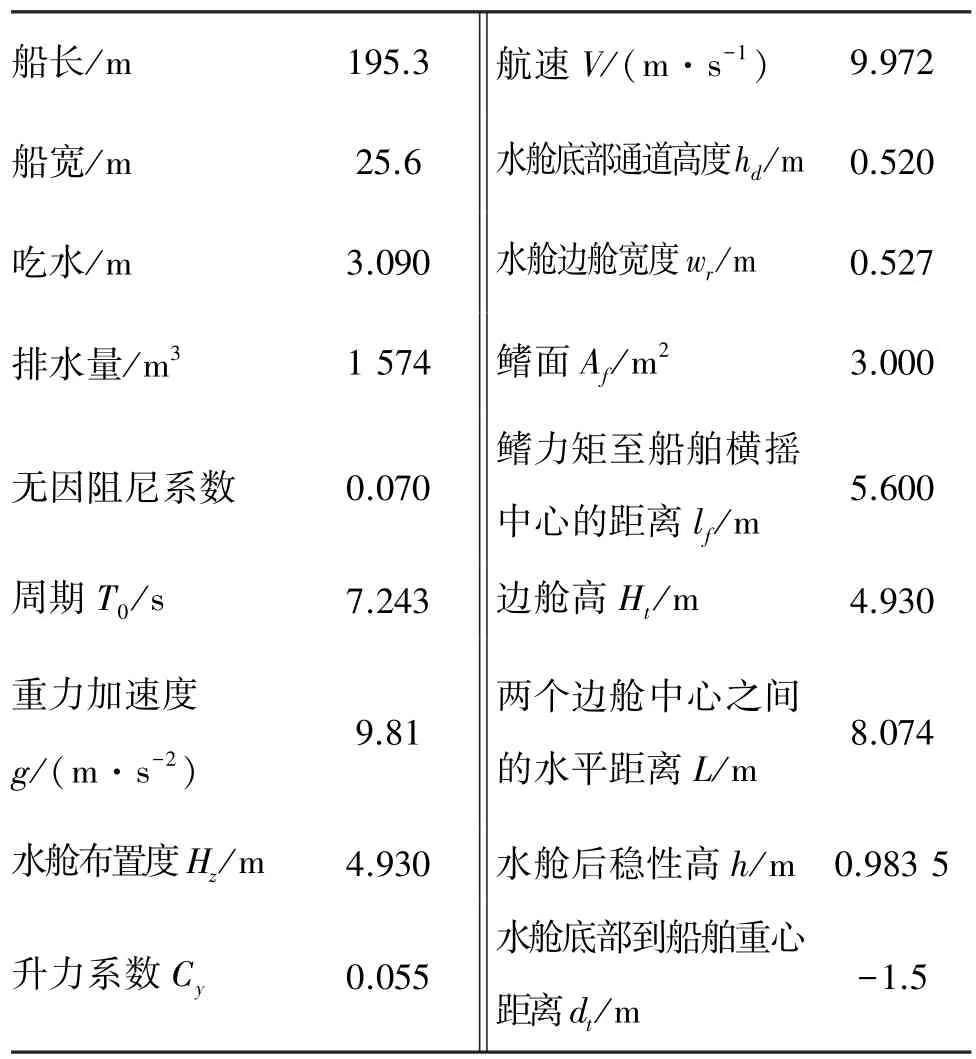
表1 综合减摇系统主要参数Table 1 Parameters of integrated stabilization system
3 仿真分析
为了验证本文提出的改进粒子群算法的可行性以及优劣性,分别采用标准粒子群算法和改进粒子群算法对式(14)中的适应度函数进行仿真,并从收敛速度、最优适应度值的变化情况以及搜索精度3方面进行比较。选取相应的参数为:初始关系权重ωmax=0.9,终惯性权重ωmin=0.1,最大速度量Vmax=0.03,最小速度量Vmin=-0.03。
选取种群规模为m=100,迭代次数为40进行仿真,结果如图2~6所示。

图2 标准粒子群算法适应度曲线Fig.2 The fitness curve of standard PSO algorithm

图3 改进粒子群算法适应度曲线Fig.3 The fitness curve of improved PSO algorithm

图4 传统PID神经网络控制图Fig.4 Neural network control chart of traditional PID

图5 基于改进粒子群算法的PID神经网络控制图Fig.5 Neural network control chart of improved parti⁃cle swarm optimization PID

图6 改进粒子群算法控制误差曲线Fig.6 The control error curve of improved PSO algorithm
图2~3分别为改进粒子群算法和标准粒子群算法对适应度函数寻优时的适应度曲线。可以看出,改进的粒子群算法在对适应度函数寻优过程中有较高的收敛速度和较好的收敛性,这也为改进粒子群算法在综合减摇控制系统PID神经网络解耦控制器设计中的应用提供了可行性。
由图4~6可以看出,改进粒子群算法优化后的PID神经网络可以取得较好的控制效果,控制量能够迅速逼近控制目标,响应时间也相对缩短。
选取特定航速为18 kn,有义波高为3.3 m,遭遇角为90°时,对2种不同算法控制下系统横摇角进行仿真,结果如图7~8所示。
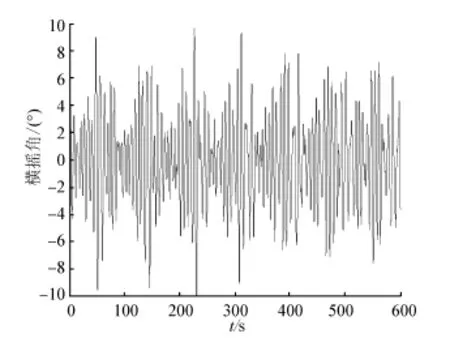
图7 标准粒子群算法下综合减摇系统横摇角Fig.7 Roll angle under the standard PSO algorithm

图8 改进粒子群算法解耦后综合减摇系统横摇角Fig.8 Roll angle under the improved PSO algorithm
对比图7、8可以看出,采用改进粒子群算法优化PID神经网络设计出的解耦控制器,其减摇效果优于传统的标准粒子群算法。为了验证基于改进粒子群算法设计出的PID神经网络解耦控制器在综合减摇控制系统中的应用效果不失一般性,选取不同情况下的参数对该方法进行仿真验证,可得到仿真数据如表2所示。
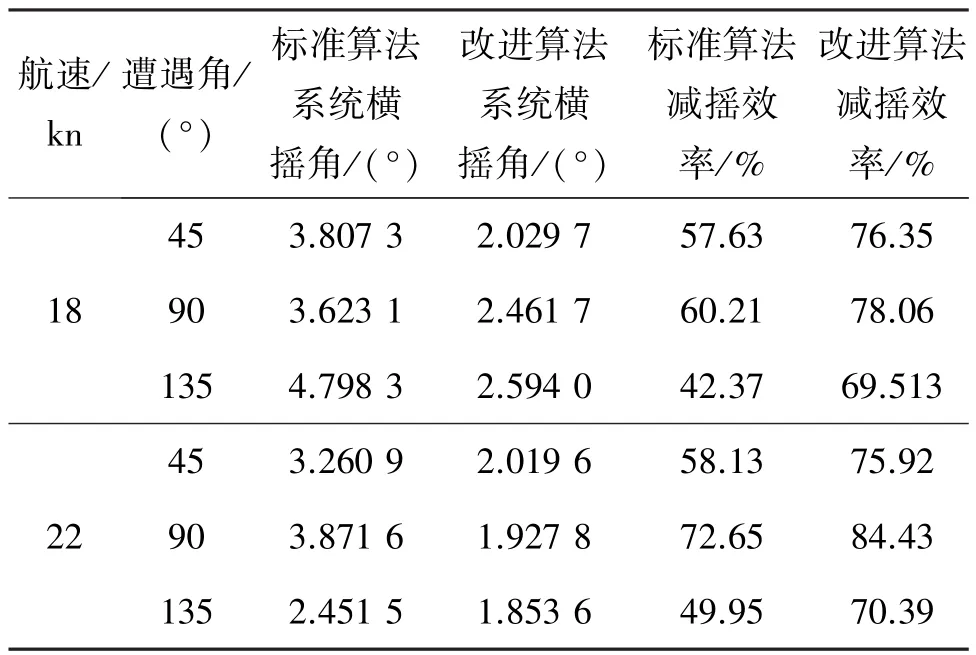
表2 不同控制方法的仿真数据统计Table 2 Simulation statistics of different control methods
由表2可知,在选取特定的海情和航速下,采用改进的粒子群算法优化PID神经网络控制器对系统进行控制,可以得到更小的横摇角和更高的减摇效率。与标准粒子群算法优化PID神经网络控制器相比,改进粒子群算法能够有效地减小船舶横摇角,取得较好的控制效果,提高控制系统的综合减摇性能。
4 结束语
在建立综合减摇系统耦合模型的过程中,为便于进行系统分析,通常会忽略耦合模型的复杂性和不确定性,这也给系统解耦带来一定的影响。为提高系统的收敛速度和收敛精度,本文在标准粒子群算法的基础上进行改进,采用改进粒子群算法进行PID神经网络参数寻优。仿真结果表明,采用本文提出的改进粒子群算法优化PID神经网络,进行解耦控制器设计能够有效降低减摇控制系统中的耦合作用,减小船舶横摇,取得较好的控制效果。
[1]孟祥振.综合减摇系统参数配置及控制器优化研究[D].哈尔滨:哈尔滨工程大学,2012:27⁃28.MENG Xiangzhen.The study of parameters configuration and controller optimization of integrated stabilization system[D].Harbin:Harbin Engineering University,2012:27⁃28.
[2]周西峰,林莹莹,郭前岗.基于粒子群算法的PID神经网络解耦控制[J].计算机技术与发展,2013,23(9):158⁃161.ZHOU Xifeng,LIN Yingying,GUO Qiangang.PID neural network decoupling control based on particle swarm optimi⁃zation[J].Computer Technology and Development,2013,23(9):158⁃161.
[3]MOHANDES M A.Modeling global solar radiation using particle swarm optimization(PSO)[J].Solar Energy,2012,86(1):3137⁃3145.
[4]应进.基于粒子群算法的航空发动机多变量控制研究[D].南昌:南昌航空大学,2011:23⁃24.YING Jin.Multivariable control for aeroengines based on particle swarm optimization algorithm[D].Nanchang:Nan⁃chang Hangkong University,2011:23⁃24.
[5]AL⁃GEELANI N A,PIAH M A M,ADZIS Z,et al.Hybrid regrouping PSO based wavelet neuralnetworks for character⁃ization of acoustic signalsdue to surface discharges on H.V.glass insulators[J].Applied Soft Computing,2013,13(12):4622⁃4632.
[6]胡建秀,曾建潮.微粒群算法中惯性权重的调整策略[J].计算机工程,2007,33(11):193⁃195.HU Jianxiu,ZENG Jianchao.Selection on inertia weight ofparticle swarm optimization[J].Computer Engineering,2007,33(11):193⁃195.
[7]陈水利,蔡国榕.PSO算法加速因子的非线性策略研究[J].长江大学学报(自然版):理工卷,2007,4(4):1⁃4.CHEN Shuili,CAI Guorong.Nonlinear strategy of PSO algo⁃rithm acceleration factor[J].Journal of Yangtze University(Nat Sci Edit):Sci&Eng V,2007,4(4):1⁃4.
[8]ALIREZA A.PSO with adaptive mutation and inertia weight and its application in parameter estimation of dynamic sys⁃tems[J].Acta Automatica Sinica,2011,37(5):541⁃549.
[9]于立君,孟祥振,金宏章,等.综合减摇系统参数配置研究[J].中国造船,2012,53(4):13⁃21.YU Lijun,MENG Xiangzhen,JIN Hongzhang,et al.Study of configuration parameters of integrated stabilization system[J].Shipbuilding of China,2012,53(4):13⁃21.
[10]于立君,孙经广,刘繁明,等.广义预测算法在综合减摇系统控制器设计中的应用[J].船舶工程,2013,35(6):76⁃79,83.YU Lijun,SUN Jingguang,LIU Fanming,et al.Applica⁃tion of generalized prediction algorithm in designing inte⁃grated stabilization system controller[J].Ship Engineer⁃ing,2013,35(6):76⁃79,83.
[11]CHIOU J S,TSAI S H,LIU Mingtang.A PSO⁃based a⁃daptive fuzzy PID⁃controllers[J].Simulation Modelling Practice and Theory,2012,26:49⁃59.
[12]沈锡.基于粒子群优化算法的船舶航向PID控制[D].大连:大连海事大学,2011:6⁃7.SHEN Xi.PID control for ship steering based on particle swarm optimization[D].Dalian:Dalian Maritime Universi⁃ty,2011:6⁃7.
[13]BOUALLÈGUE S,HAGGÈGE J,AYADI M,et al.PID-type fuzzy logic controller tuning based on particle swarm optimization[J].Engineering Applications of Artificial In⁃telligence,2012,25(3):484⁃493.
[14]RATNAWEERA A,HAIGAMUGE S K,WATSON H C.Self⁃organizing hierarchical particle swarm optimizer with time⁃varying acceleration coefficients[J].IEEE Transac⁃tions on Evolutionary Compution,2004,8(3):240⁃255.
[15]乔俊飞,逄泽芳,韩红桂.基于改进粒子群算法的污水处理过程神经网络优化控制[J].智能系统学报,2012,7(5):429⁃436.QIAO Junfei,PANG Zefang,HAN Honggui.Neural net⁃work optimal control for wastewater treatment process based on APSO[J].CAAI Transactions on Intelligent Systems,2012,7(5):429⁃436.
An improved particle swarm optimization for PID neural network decoupling control
YU Lijun,CHEN Jia,LIU Fanming,WANG Hui
(College of Automation,Harbin Engineering University,Harbin 150001,China)
The integrated ship stabilization system has nonlinear,multi⁃variable and strong coupling characteristics,which may hinder the system from reaching the best control state.An improved particle swarm algorithm is proposed based on the characteristics of particle swarm optimization(PSO)algorithm,which can search the parameter space efficiently,along with its associated PID artificial neuron network that has self⁃regulation and adaptability.The im⁃proved particle swarm algorithm can overcome disadvantages in former particle swarm algorithms such as low preci⁃sion,the particles tend to fall into extremely small values,and so on.In addition,the improved algorithm can in⁃crease the training speed and precision of the PID nerve network,which facilitates parameter optimization.The sim⁃ulation results show that the improved PSO has certain advantages,it can reduce ship rolling,and can achieve ex⁃cellent control effects when it is applied to the design of the decoupling control of an integrated stabilization control system.
particle swarm algorithms;integrate stabilization system;PID neural network;decoupling control;sim⁃ulation analysis

于立君,男,1975年生,副教授,博士,主要研究方向为船舶运动控制、先进控制理论及应用。主持并完成博士后基金1项、横向项目1项、中央高校自由探索计划5项,获得黑龙江省科技进步二等奖1项。

陈佳,女,1989年生,硕士研究生,主要研究方向为船舶智能控制理论方法与应用。

刘繁明,男,1963年生,教授,博士生导师,主要研究方向为水下潜器定位技术、弱信号测量与处理技术、被动导航与定位技术、工业装置测控技术。承担“十二五”预先研究项目2项,国家自然科学基金重点项目1项,设备研制项目多项。
TH186
TP18
1673⁃4785(2015)05⁃0699⁃06
10.11992/tis.201406028
http://www.cnki.net/kcms/detail/23.1538.tp.20150930.1556.004.html
于立君,陈佳,刘繁明,等.改进粒子群算法的PID神经网络解耦控制[J].智能系统学报,2015,10(5):699⁃704.
英文引用格式:YU Lijun,CHEN Jia,LIU Fanming,et al.An improved particle swarm optimization for PID neural network de⁃coupling control[J].CAAI Transactions on Intelligent Systems,2015,10(5):699⁃704.
2014⁃06⁃17.
日期:2015⁃09⁃30.
中央高校自由探索计划资助项目(HEUCF041406).
于立君.E⁃mail:yulijun@hrbeu.edu.cn.
