半监督SVM分类算法的交通视频车辆检测方法
2015-12-03蒋新华高晟廖律超邹复民
蒋新华,高晟,廖律超,邹复民
(1.中南大学信息科学与工程学院,湖南长沙410075;2.福建工程学院福建省汽车电子与电驱动技术重点实验室,福建福州350108;3.中南大学软件学院,湖南长沙410075)
半监督SVM分类算法的交通视频车辆检测方法
蒋新华1,2,高晟3,廖律超1,2,邹复民2
(1.中南大学信息科学与工程学院,湖南长沙410075;2.福建工程学院福建省汽车电子与电驱动技术重点实验室,福建福州350108;3.中南大学软件学院,湖南长沙410075)
针对交通场景运动车辆检测中车辆数目统计准确率不高、自适应性不强等问题,提出了一种基于半监督支持向量机(SVM)分类算法的交通视频车辆检测方法。利用人工标记的少量样本,分别训练2个基于方向梯度直方图(HOG)特征与基于局部二值模式(LBP)特征的不同核函数的SVM分类器;结合半监督算法的思想,构建SVM的半监督分类方法(SEMI⁃SVM),标记未知样本并加入到原样本库中,该方法支持样本库动态更新,避免了繁重的人工标记样本的工作,提高了自适应性;最后,通过三帧差分法提取运动区域,加载分类器在该区域进行多尺度检测,标记检测出来的运动车辆,统计车辆数目。实验结果表明:该方法在具有一定的自适应性的同时,有较高的车辆检测准确率,即使在复杂交通情况下,对运动车辆依然有很好的检测效果。
车辆检测;HOG特征;LBP特征;SVM分类器;半监督学习;运动区域
交通视频车辆检测是一种利用视频图像实现对车辆进行检测的交通检测技术,它可以检测多种参数和检测范围较大等优点,但如何设计高效的车辆检测算法,提高检测准确率和实时性是亟待解决的问题。
目前,通过交通视频进行车辆检测的方法主要有:帧间差分法[1]、灰度等级法[2]、背景相减法[3⁃5]和边缘检测法等。帧间差分法是对视频序列相邻2帧所对应像素进行差分处理来检测运动车辆,但该算法对环境噪声比较敏感,依赖于连续帧的时间间隔以及车辆速度。灰度等级方法则是利用运动车辆及背景来统计灰度阈值以检测运动目标,但周围环境和光线变化都会影响该阈值,导致检测不准确。而背景差分法则是采用当前帧与背景图像对应的像素作差,实现对运动目标的检测,但对外界条件引起的变化较敏感,对环境依赖性较强。边缘检测法[6⁃7]是通过目标的边缘特性进行检测,能够克服光照等不利因素的影响,但当所检测目标边缘特征不明显的,会导致检测错误等问题。上述方法都存在计算量较大,对外部环境的依赖性较大,检测的精确度不高等不足,尤其对于静止的车辆,这些方法又难以处理,使后续研究变得困难。
为了解决上述问题,并进一步提高检测的性能,近年来,基于机器学习理论的视频目标检测已逐渐成为国内外的研究热点之一[8],并取得了一系列研究成果。文献[9]利用深卷积神经网络(DNNS)的自动学习功能,实现了在复杂环境下的车辆检测,提高了目标检测性能。文献[10]研究了Gabor小波变换和方向梯度直方图(HOG)2种特征,利用K近邻结合随机森林的方法进行车辆检测,实验结果证明该方法能较好地提高车辆检测率。文献[11]利用动态贝叶斯网络对车辆颜色和局部纹理进行综合分析后实现车辆检测。文献[12]结合了离线boost和TLD进行车辆检测,在视频环境中取得了较好的检测效果。文献[13]则利用Adaboost结合支持向量机(SVM)方法对HOG特征进行处理后对复杂环境的车辆进行检测。虽然使用机器学习的方法取得了较好的车辆检测效果,但上述方法都需要准备大量的样本,检测准确率与样本数量有密切关系,而且人工标注样本是一件非常繁琐的事情。
因此,本文结合Co⁃training算法[14]与Tri⁃train⁃ing算法[15]的思想,构建了SVM的半监督分类器并基于遗传算法(GA)进行参数优选,该分类器可支持动态获取新样本进行学习,不仅提高了分类精度,而且还大大减轻了采集训练样本的工作量。同时,针对车辆检测的准确率和自适应性的问题,本文提出了基于半监督SVM分类算法的交通视频车辆检测方法,提取特定的运动区域后用分类器进行检测,有效剔除了大量干扰检测的无用信息,加快了检测速度。而且,该方法支持样本库的动态更新,能有效提高检测准确率,降低误检率,并可用于检测复杂交通道路的运动车辆。
1 SVM的半监督分类方法(SEMI⁃SVM)
1.1 交通视频特征提取
局部二值模式(LBP)特征是机器视觉处理中用于图像分类的一种特征[16]。提取LBP特征向量的步骤是:1)将交通视频检测窗口划分成16×16的细胞单元(cell),对于每个细胞单元中的一个像素,将其环形邻域内的若干个点(如图1所示)进行顺时针或者逆时针的比较,若中心点像素值比其邻点大,则将邻点标记为1,否则为0。这样邻域内每个点都可产生一个8位二进制数,即得到该窗口中心像素点的LBP值。2)计算每个细胞单元的直方图,即每个数值出现的频率,再对该直方图进行归一化处理。3)将得到的每个细胞单元的统计直方图进行连接成为一个特征向量,就是该图像的LBP纹理特征向量。本文从交通视频中截取的包含车辆与不包含车辆的正、负样本的图像用于分类器的训练,样本图像均规整为64×128像素,每个细胞单元大小为8×8像素,每个块的大小为16×16像素,共可提取出2 830个LBP特征。

图1 LBP特征Fig.1 LBP features
HOG特征是一种方向梯度直方图的表示方法,该特征对图像中局部边缘信息不明显和形状变化很微小的运动物体都能进行特征化,提取这些特征进行分类识别[17]。HOG特征提取的步骤是:1)将交通视频图像进行灰度处理,利用Gamma校正法调整图像对比度,以减小阴影与光线变化对局部图像造成影响。2)对图像进行归一化处理,计算每个像素的梯度(方向与大小),图像被分为许多细胞单元(cell),将其中若干个细胞单元组成一个块(block)。3)统计每个块内像素梯度方向直方图,将块以一个单位为步长扫描图像,串联所有块即可得到该图像的特征。图像梯度维度的计算方法如下:

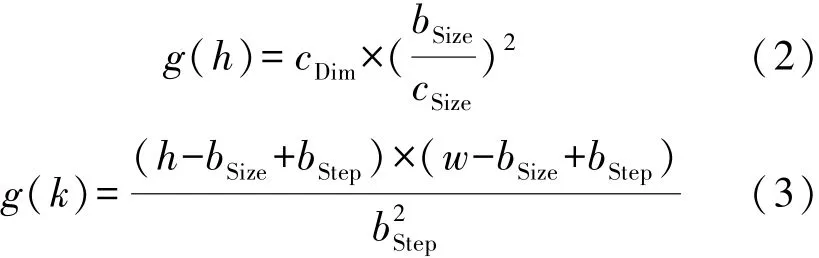
式中:cDim为细胞单元的维数,bSize为块的大小,cSize为细胞单元的大小,bStep为块的移动步长,h和w为图像的高度与宽度。
本文中训练分类器的样本图像是从交通视频中截取包含车辆的正样本和不包含车辆的负样本,样本图像归一化为64×128像素,每个细胞单元大小为8×8像素,每个块的大小为16×16像素,每个像素点的梯度划分为9个方向,块的移动步长为8个像素。因此,每个样本图像提取的HOG特征有3 780维特征,将该特征用于SVM分类器进行学习与分类。
2.2 SVM学习及其参数优化
SVM分类是通过一个非线性映射将作为学习样本的交通视频图像的各个属性分量映射到高维特征空间F中,然后利用结构风险最小化原则在F中找到间隔最大的超平面,能将给定的视频车辆训练样本进行正确的分类[18]。其中,超平面和样本的最大距离即为构造超平面的依据。
交通视频车辆检测的训练集{(Xk,Yk)|k=1,2,…,l}由2类组成。其中,Xk∈Rd为输入,Yk∈{-1,1}为类别判别输出,如果Xk∈Rd为有车辆,则标记为(Yk=1);如果无车辆,则标记为负(Yk=-1)。训练的目标就是构造一个判别函数G(X)=W·X+b作为分类面对交通视频样本数据能较准确进行分类,并且要求分类间隔最大化,就需使‖W‖或‖W‖2最小;要让分类面对所有样本数据进行正确分类,需满足条件Yi[(W·Xi)+b]-1≥0,对任意样本空间的{Xk,Yk}。
对于线性可分的样本,可以引入松弛变量ζi≥0来构造分类超平面,此时目标函数为

式中:C为惩罚因子,当C=0时,就是线性可分问题。
为了更有效地处理图像属性与交通视频有无车辆的分类问题之间的非线性关系,本文选用径向基核函数将样本属性在低维空间的非线性问题映射成高维特征空间的线性问题,并在新空间中求解最优分类面,即得

式中:αi为拉格朗日乘数,可以得到原优化问题相对应的对偶问题,每个约束条件在原问题中所对应的Lagrange乘子:

式中K(Xi,Xj)为核函数。
研究表明,对SVM分类器而言,核函数的选择是决定其性能的关键因素[19]。选择不同的核函数将影响分类器的效率与精度。目前应用最广泛的核函数主要有[20]:
1)Sigmoid核函数,表达式为

2)多项式核函数,表达式为

3)径向基核函数,表达式为

多项式核函数属于全局核函数,具有全局特性。径向基核函数属于局部核函数,具有局部性。Sig⁃moid核函数由于参数选择尤为困难,一般不被采用。由于交通视频车辆检测过程存在着强非线性的特点,因此本文采用径向基核函数与多项式核函数建立车辆检测模型,并对径向基核函数处理模型进行调优。
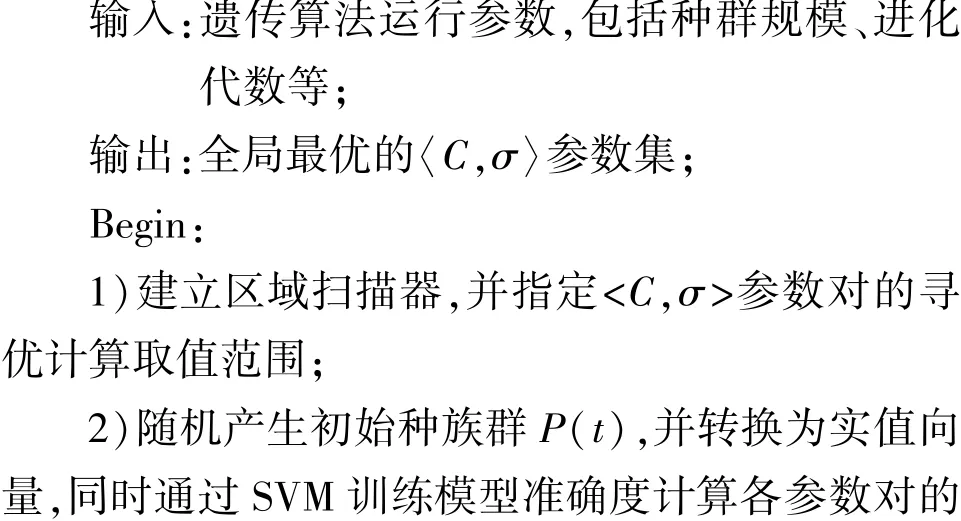
径向基核函数SVM处理模型具有很好的小样本学习能力及泛化性能,但需要对模型惩罚参数C和核函数参数σ进行调优,提高分类准确率,得到比较理想的检测结果。本文采用遗传算法对分类器模型参数进行优选,实现模型参数的最优化,从而提高分类器检测的准确率,能够避免过度学习与欠学习状态的情况,提高在不同场景下交通视频的自适应性。模型参数自动寻优算法(GOA⁃SVM)的基本步骤如下:
1.3 半监督SVM学习算法
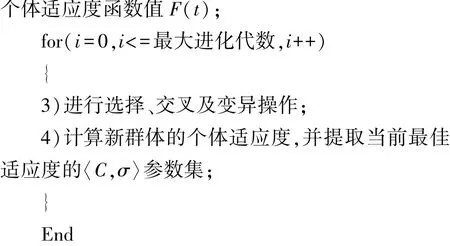
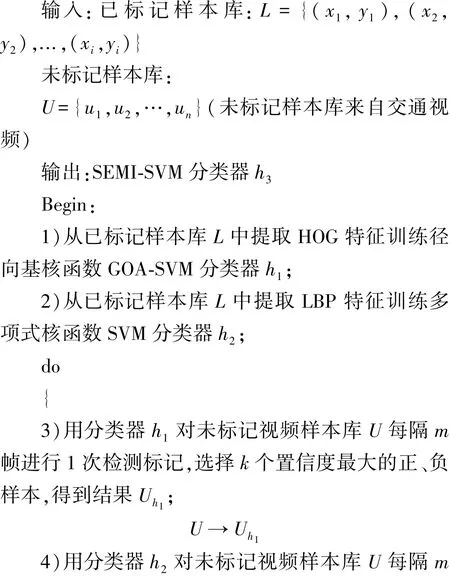
本文综合Co⁃training算法与Tri⁃training算法的思想,提出一种半监督SVM学习算法(SEMI⁃SVM)。该算法在同一个交通视频样本库中提取HOG特征训练遗传算法优化后的径向基核函数GOA⁃SVM分类器,提取LBP特征训练多项式核函数SVM分类器。利用这2个分类器分别对未标记的交通视频样本进行识别,从中选择置信度比较高的正、负样本。比较2个分类器的标记结果,将标记结果一致的样本重新加入到原样本库中,更新样本库,重新训练分类器;如此循环上述步骤,直至视频结束。选取识别效果好的一个分类器作为最终分类器输出并进行后续检测。这样不仅能让科研人员从繁重的人工标记样本的工作中得到解放,而且能够动态更新样本库,大大增加自适应性,提高检测准确率。
SEMI⁃SVM学习算法的基本步骤如下:

其中,SEMI⁃SVM算法要求有2个不同类型的分类器进行协同训练,若采用相同的分类器就变成了自训练算法。该算法中虽然采用的2个分类器都是SVM分类器,但由于这里选取不同的核函数,可认为是2个不同分类器进行协同训练。
由于该学习算法是利用2个不同分类器对同一个未标记样本视频进行检测并标记,若2次标记结果相同,说明正确标记该未知样本的置信度就比较高,则将该标记作为新的样本加入到样本库中就更有价值。
2 特定运动区域的SEMI⁃SVM优化方法
本文采用的车辆检测方法是先对全图作帧间差分,通过扩展补偿得到运动区域,然后选取特定的运动区域利用已训练好的分类器进行检测。
1)对图像进行帧间差分及二值化阈值分割。
设I(m,n,t)为t时刻的图像序列,(m,n)表示图像中坐标为(m,n)的像素点,选取视频序列,连续的3帧I(m,n,t-1),I(m,n,t)和I(m,n,t+1),利用式(11)、(12)分别对相邻的帧作帧间差分:

式中D(m,n)为差分图像。
选取适当的阈值T对得到的差分图像D(m,n)进行二值化如下:
对所得的2幅二值前景图做“或”运算,得到二值图像:
2)利用中指滤波进行图像平滑处理。
中值滤波能够很好地抑制脉冲干扰和图像噪声,保护图像的边缘信息。利用中值滤波进行平滑处理可以保留更多的关于图像的灰度信息,使图像轮廓检测的质量得到保障。
3)对二值图像形态学去噪。
对B(m,n)进行膨胀然后腐蚀可以去除图像中的孤立噪点和部分空洞,弥合小裂缝,而总的位置和形状不变。
4)获取运动区域并进行多尺度检测。
对去噪处理后的图像,寻找运动区域的连通域,在遍历标记连通域时适当扩展区域,可以完整的得到运动区域如图2所示。选取特定运动区域,利用分类器进行车辆检测。

图2 运动车辆区域Fig.2 Vehicle motion region
3 实验结果与分析
系统实验采用福州市五四路冶山路南路段的交通视频数据(分辨率:1 140×934),系统实验主机硬件配置为Core i5⁃3470 CPU(4核,3.2 GHz主频),4 G内存,Microsoft Windows 7系统,算法基于C++以及OpenCV开发实现。
3.1 初始分类器样本集
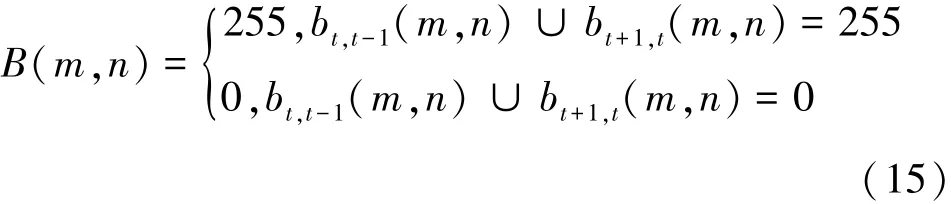
初始样本的获取主要以人工方式处理,其中,正样本为人工截取视频中车辆尾部(图3(a))。负样本则为人工截取视频中不包括车辆的图像(图3(b)),例如非机动车、行人、道路和建筑物等,甚至网上搜索到的不包括车辆的随意图像。正、负样本的尺寸统一截取为64×128像素。通过上述方式,本文提取初始的800个正样本和2 000个负样本的HOG特征与LBP特征分别进行径向基核函数GOA⁃SVM分类器与多项式核函数SVM分类器的训练学习。
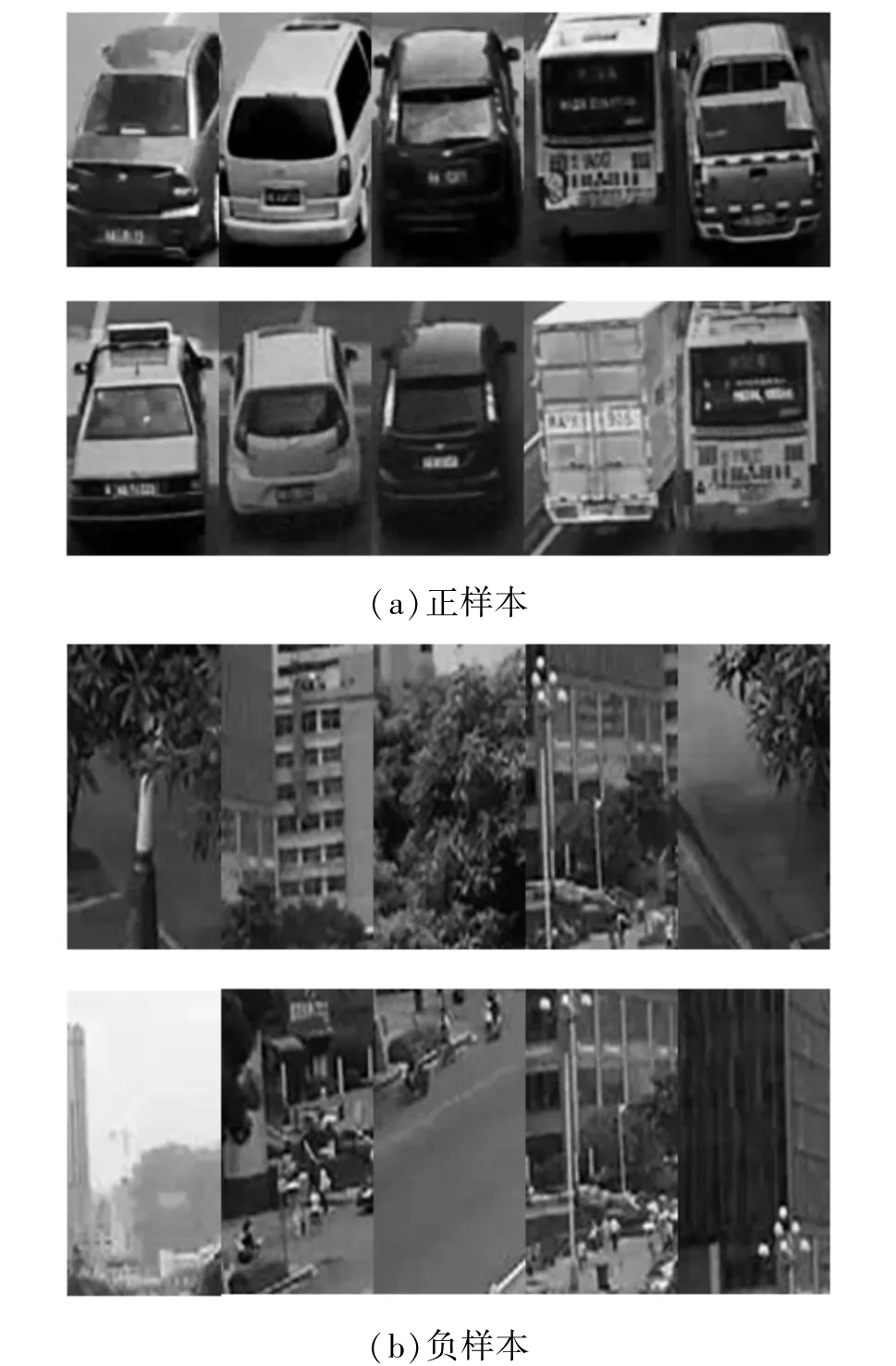
图3 原始训练的部分正、负样本图片Fig.3 Part of positive and negative sample pictures for the initial classifier
3.2 初始样本集SVM分类器实现及实验结果
在经过交通视频正、负样本HOG与LBP特征属性提取之后,分别对2种核函数SVM分类器进行训练学习。同时采用遗传算法对径向基核函数SVM分类器模型(GOA⁃SVM)的训练适应度进行遗传演化择优,并对分类器的检测准确度进行自适应动态调优。
对正、负样本特征数据进行半交叉验证测试,利用不同参数数据进行GOA⁃SVM分类器模型与多项式核函数SVM分类器模型的样本训练学习测试,得到基于径向基核函数与多项式核函数SVM分类器模型较优参数如表1所示。
表1 不同核函数的参数结果Table 1 Parameters of different kernel functions
利用训练得到的2个初始GOA⁃SVM分类器与多项式核函数SVM分类器分别对视频进行车辆检测。
为了能够检测出不同尺寸的车辆,本文采用多尺度检测方法。按一定的尺寸逐渐扩大检测窗口,将图像中的一部分作为分类器的输入进行多尺度检测。一般情况下同一辆车会在不同尺寸和相同尺寸下被检测多次,本文遍历当前帧所检测到的运动车辆,并用矩形窗口标记出来,要判断检测出的任意2个矩形窗口的重叠率,设置一定的阈值。如果重叠率大于该阈值,则放弃该矩形窗口,一个运动车辆最终只保留一个检测矩形窗口。
利用初始GOA⁃SVM分类器与多项式核函数SVM分类器分别对一段时长为5 min的交通视频(福州市五四路冶山路南路段,2014年4月13日,14:30~14:35)进行检测,并对单向车道进行车流量统计(如图4~5所示)。实验测试表明,2种SVM分类器检测准确率较低,错误检测的情况比较严重。

图4 GOA⁃SVM分类器的车辆检测结果Fig.4 Vehicle detect results of GOA⁃SVM classification

图5 多项式核函数SVM分类器的车辆检测结果Fig.5 Vehicle detect results of the polynomial kernel SVM classification
3.3 SEMI⁃SVM分类器检测及实验结果
将多项式核函数SVM分类器与GOA⁃SVM分类器分别对同一段时长为1 h的交通视频(福州市五四路冶山路南路段,2014年4月13日,10:30~11:30)开始半监督学习,将检测出来的包括车辆的正样本和不包括车辆的负样本保存为图片。比较分类器标记结果,将标记结果相同的样本加入样本库,进行样本库更新。通过人工调整后最终共获得3 000个正样本和20 000个负样本,用最终更新的样本库训练多项式核函数SVM分类器与GOA⁃SVM分类器,在2个分类器中选取检测结果精度较高的分类器作为最终分类器记为SEMI⁃SVM分类器,即基于半监督学习的多项式核函数SVM分类器与GOA⁃SVM分类器协同进行分类的方法。
利用SEMI⁃SVM分类器对同一段时长为5 min的交通视频(福州市五四路冶山路南路段,2014年4月13日,14:30~14:35)进行检测,并对单向车道进行车流量统计(如图6所示)。实验测试表明,半监督学习后的SVM分类器检测准确率有较大的提高,检测结果得到较好改善,但是还存在较多的错误检测。
3.4 特定运动区域的SEMI⁃SVM优化方法车辆检测实验结果及分析
对交通视频作帧间差分,通过扩展得到运动区域,然后选取特定的运动区域利用训练好的SEMI⁃SVM分类器,对同一段时长为5 min的交通视频(福州市五四路冶山路南路段,2014年4月13日,14:30~14:35)进行检测,并对单向车道进行车流量统计(如图7所示)。
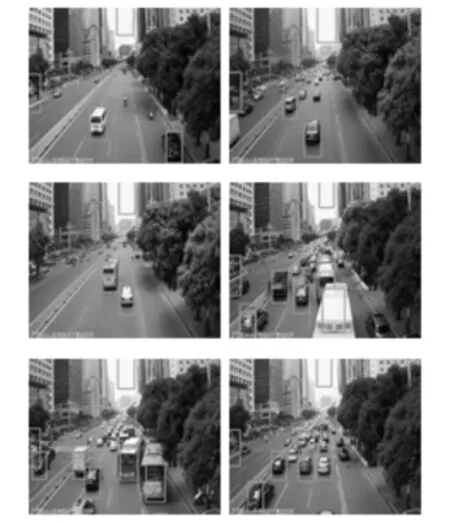
图6 半监督学习后分类器的车辆检测结果Fig.6 Vehicle detect results after semi⁃supervised learning

图7 特定运动区域的SEMI⁃SVM车辆检测结果Fig.7 Vehicle detect results of specific motion region based on SIMI⁃SVM
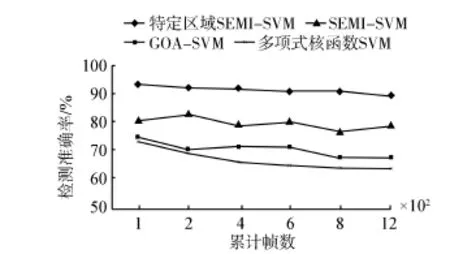
图8 不同算法检测准确率Fig.8 Detection accuracy of different algorithms
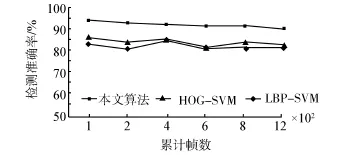
图9 3种方法检测准确率Fig.9 Detection accuracy of three algorithms
图7 和8的实验结果表明,半监督学习提高了分类器的检测准确率,基于特定区域的SEMI⁃SVM优化算法误检率大大降低,得到了较好的检测效果。
在视频检测中,基于特定区域的SEMI⁃SVM车辆检测,小轿车、面包车以及公交车的检测准确率能达到90%以上,其他车型复杂的汽车检测准确率能达到85%以上,能够保持较低的误检率。
本文算法提取交通视频样本的HOG特征训练径向基核函数GOA⁃SVM分类器,提取LBP特征训练多项式核函数SVM分类器,将2种分类器协同训练作为最终分类器SEMI⁃SVM在特定区域进行车辆检测。现采用单一的HOG特征训练2种分类器进行实验,其最终分类器记为HOG⁃SVM;然后采用单一的LBP特征训练2种分类器进行检测,其最终分类器记为LBP⁃SVM。将本文算法、HOG⁃SVM分类器与LBP⁃SVM分类器分别对同一段交通视频(福州市五四路冶山路南路段,2014年4月13日)做单向车道车流量统计,实验结果如图9所示。
从图9可以看出,采用不同特征空间数据(HOG特征与LBP特征)进行分类器的训练,其检测准确率较同一特征空间的数据有明显提升,本文所采用的方法在车辆检测中取得了较理想的效果与准确率。
将本文算法与平均背景法、帧差法、灰度等级法和边缘检测法分别对同一段交通视频(福州市五四路冶山路南路段,2014年4月13日)做单向车道车流量统计,并进行各方法的检测准确率测试以及每一帧检测时间测试,实验结果如表2所示。

表2 5种检测方法统计结果Table 2 Statistical results of five algorithms
实验结果表明,本文方法与其他检测方法相比,能保持较高的检测准确率,并且可以有效减少每帧检测时间。由于背景法、帧差法及灰度等级法对光线、天气等影响因素十分敏感,边缘法由于路面及车辆边缘不明显容易产生误检[21],并且受非机动车,行人等因素干扰导致错误检测,当发生交通拥堵或者较多车辆并排行驶等复杂的交通情况时,以上方法检测准确率会大大降低。而本文的方法能很好克服光线、天气、阴影和车辆行驶特性的干扰,能很好鉴别非机动车及行人,提高车流量统计精确度,而且应对拥堵等复杂的交通情况时,也能很好进行检测。
为了验证不同复杂场景下本文方法依然有较好的检测准确率,选取4个不同场景下时长为5分钟的交通视频进行实验(如图10所示)。与帧差法、背景法进行比较,系统实验的检测结果(表3)表明,即使在不同的复杂交通场景下,本文的算法仍保持较高的检测准确率。
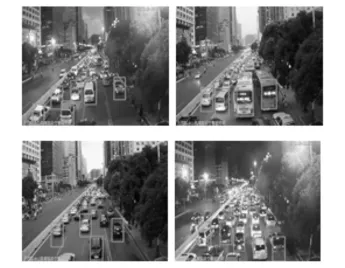
图10 复杂交通场景的车辆检测结果Fig.10 Vehicle detect results of the complex traffic cir⁃cumstances

表3 不同交通场景的车辆检测准确率Table 3 Detection accuracy of the different traffic circum⁃stances%
4 结束语
本文针对复杂交通场景的运动车辆检测中车辆数目统计准确度不高,自适应性不强等问题,提出了一种基于半监督SVM分类算法的交通视频车辆检测方法,利用半监督学习思想进行车辆检测,能够动态更新样本库,提高了自适应性,同时能大大减少人工进行截图工作量。在分类器检测之前提取了特定的运动区域,能大幅度减少干扰区域,很大程度上提高了车辆的检测准确率,并且有效减少每帧的检测时间。实验结果表明,相比传统方法以及在复杂交通环境下,本文算法都具有较高的检测准确率。下一步的工作将围绕如何提高检测速度及实时性方面做进一步的研究。
[1]XIONG Changzhen,FAN Wuyi,LI Zhengxi.Traffic flow detection algorithm based on intensity curve of high⁃resolu⁃tion image[C]//IEEE Computer Modeling and Simulation.Sanya,China,2010:159⁃162.
[2]MARIN D,AQUINO A,GEGU'NDEZ⁃ARIAS M E,et al.A new supervised method for blood vessel segmentation in reti⁃nal images by using gray⁃level and moment invariants⁃based features[J].IEEE Transactions on Medical Imaging,2011,30(1):146⁃158.
[3]HAN B,DAVIS L S.Density⁃based multifeature background subtraction with support vector machine[J].IEEE Transac⁃tions on Pattern Analysis and Machine Intelligence,2012,34(5):1017⁃1023.
[4]CHENG Li,GONG Minglun,SCHUURMANS D,et al.Re⁃al⁃time discriminative background subtraction[J].IEEE Transactions on Image Processing,2011,20(5):1401⁃1414.
[5]BARNICH O,VAN DROOGENBROECK M.ViBe:A uni⁃versal background subtraction algorithm for video sequences[J].IEEE Transactions on Image Processing,2011,20(6):1709⁃1724.
[6]FU Wenlong,JOHNSTON M,ZHANG Mengjie.Genetic programming for edge detection:a global approach[C]//2011 IEEE Congress on Evolutionary Computation.Welling⁃ton,New Zealand,2011:254⁃261.
[7]Al⁃GHAILI A M,MASHOHOR S,RAMLI A R,et al.Ver⁃tical⁃edge⁃based car⁃license⁃plate detection method[J].IEEE Transactions on Vehicular Technology,2013,62(1):26⁃38.
[8]钱志明,杨家宽,段连鑫.基于视频的车辆检测与跟踪研究进展[J].中南大学学报:自然科学版,2013,44(S2):222⁃227.QIAN Zhiming,YANG Jiakuan,DUAN Lianxin.Research advances in video⁃based vehicle detection and tracking[J].Journal of Central South University:Science and Technolo⁃gy,2013,44(S2):222⁃227.
[9]CHEN Xueyun,XIANG Shiming,LIU Chenglin,et al.Ve⁃hicle detection in satellite images by hybrid deep convolu⁃tional neural networks[J].IEEE Geoscience and Remote Sensing Letters,2014,11(10):1797⁃1801.
[10]ZHANG Bailing.Reliable classification of vehicle types based on cascade classifier ensembles[J].IEEE Transac⁃tions on Intelligent Transportation Systems,2013,14(1):322⁃332.
[11]CHENG H Y,WENG C C,CHEN Yiying.Vehicle detec⁃tion in aerial surveillance using dynamic Bayesian networks[J].IEEE Transactions on Image Processing,2012,21(4):2152⁃2159.
[12]CARAFFI C,VOJIR T,TREFNY J,et al.A system for real⁃time detection and tracking of vehicles from a single car⁃mounted camera[C]//2012 15th International IEEE Conference on Intelligent Transportation Systems.Anchor⁃age,USA,2012:975⁃982.
[13]CAO Xianbin,WU Changxia,YAN Pingkun,et al.Linear SVM classification using boosting HOG features for vehicle detection in low⁃altitude airborne videos[C]//2011 18th IEEE International Conference on Image Processing.Hefei,China,2011:2421⁃2424.
[14]DARNSTÄDT M,SIMON H U,SZÖRÉNYI B.Supervised learning and co⁃training[J].Theoretical Computer Sci⁃ence,2014,519:68⁃87.
[15]刘杨磊,梁吉业,高嘉伟,等.基于Tri⁃training的半监督多标记学习算法[J].智能系统学报,2013,8(5):439⁃445.LIU Yanglei,LIANG Jiye,GAO Jiawei,et al.Semi⁃super⁃vised multi⁃label learning algorithm based on Tri⁃training[J].CAAI Transactions on Intelligent Systems,2013,8(5):439⁃445.
[16]WANG Xiaoyu,HAN T X,YAN Shuicheng.An HOG⁃LBP human detector with partial occlusion handling[C]//2009 IEEE 12th International Conference on Computer Vi⁃ sion.Kyoto,Japan,2009:32⁃39.
[17]DALAL N,TRIGGS B.Histograms of oriented gradients for human detection[C]//IEEE Computer Society Conference on Computer Vision and Pattern Recognition.San Diego,USA,2005:886⁃893.
[18]CHANG C C,LIN C J.LIBSVM:a library for support vec⁃tor machines[J].ACM Transactions on Intelligent Systems and Technology(TIST),2011,2(3):27.
[19]钱晓山,阳春华.基于GEP的最小二乘支持向量机模型参数选择[J].智能系统学报,2012,7(3):225⁃229.QIAN Xiaoshan,YANG Chunhua.A parameter selection method of a least squares support vector machine based on gene expression programming[J].CAAI Transactions on Intelligent Systems,2012,7(3):225⁃229.
[20]BEN⁃HUR A,WESTON J.A user’s guide to support vec⁃tor machines[M]//Data Mining Techniques for the Life Sciences.Washington,DC:Humana Press,2010:223⁃239.
[21]胡光龙,秦世引.动态成像条件下基于SURF和Mean
shift的运动目标高精度检测[J].智能系统学报,2012,7(1):61⁃68.
HU Guanglong,QIN Shiyin.High precision detection of a mobile object under dynamic imaging based on SURF and Mean shift[J].CAAI Transactions on Intelligent Systems,2012,7(1):61⁃68.
Traffic video vehicle detection based on semi⁃supervised SVM classification algorithm
JIANG Xinhua1,2,GAO Sheng3,LIAO Ljuchao1,2,ZOU Fumin2
(1.School of Information Science and Engineering,Central South University,Changsha 410075,China;2.Fujian Key Laboratory for Automotive Electronics and Electric Drive,Fujian University of Technology,Fuzhou 350108,China;3.School of Software Engineer⁃ing,Central South University,Changsha 410075,China)
This paper presents a kind of traffic video vehicle detection method based on a semi⁃supervised support vector machine(SVM)classification algorithm to improve accuracy and enhance adaptability of vehicle counting in the traffic scene.By analyzing a small number of artificially labeled samples,two SVM classifiers with different ker⁃nels are trained on the basis of histograms of oriented gradients(HOG)features and local binary pattern(LBP)features,respectively.A semi⁃supervised SVM(SEMI⁃SVM)for classification is proposed by adopting the thoughts of semi learning.Then the unknown samples are labeled and added into the original sample database.The proposed method supports data update of the dynamic sample database,avoids heavy manual work labeling samples and en⁃hances adaptability of the algorithm.A motion region is extracted using the three⁃frame difference rule.The classifi⁃er is then loaded to make a multi⁃scale detection in the extracted motion region,and moving vehicles are marked and counted.The results show the algorithm has good response,good adaptability,and the detection accuracy of moving vehicles is much improved,even under the complex traffic circumstances.
vehicle detection;histograms of oriented gradients(HOG)feature;local binary pattern(LBP)fea⁃ture;support vector machine(SVM)classifier;semi⁃supervised learning;motion region

蒋新华,男,1956年生,教授,博士生导师,福建工程学院校长,主要研究方向为控制理论应用、电力机车智能故障诊断技术、移动互联网关键技术和车联网关键技术。主持和参加铁道部、湖南省、福建省等重要科学研究项目30余项,发表学术论文100余篇。

高晟,男,1989年生,硕士研究生,主要研究方向为交通信息分析及图像处理。参与国家自然科学基金资助项目1项,授权发明专利4项。

廖律超,1980年生,工程师,博士研究生,主要研究方向为海量动态信息数据挖掘分析、交通信息处理关键技术。
TP181
A
1673⁃4785(2015)05⁃0690⁃09
10.11992/tis.201406044
http://www.cnki.net/kcms/detail/23.1538.tp.20150930.1556.010.html
蒋新华,高晟,廖律超,等.半监督SVM分类算法的交通视频车辆检测方法[J].智能系统学报,2015,10(5):690⁃698.
英文引用格式:JIANG Xinhua,GAO Sheng,LIAO Lyuchao,et al.Traffic video vehicle detection based on semi⁃supervised SVM classification algorithm[J].CAAI Transactions on Intelligent Systems,2015,10(5):690⁃698.
2014⁃06⁃22.
日期:2015⁃09⁃30.
国家自然科学基金资助项目(61304199,41471333);福建省高校杰出青年科研人才计划(JA14209);福建省自然科学基金资助项目(2013J01214);福建省科技重大专项专题资助项目(2011HZ0002⁃1);福建省交通科技计划项目(201318),福建省教育厅B类科研项目(JB3213).
高晟.E⁃mail:csugaosheng@163.com.
