模拟空投发射架动态参数计量测试方法
2015-12-02王毅张荣阁
王毅,张荣阁
(昆明船舶设备研究试验中心计量站,云南昆明650051)
0 引言
空投鱼雷是鱼雷的一个类别,它是由飞机携带投放用于攻击潜艇或水面舰艇的鱼雷。在空投鱼雷的外场试验中,船载空投鱼雷模拟发射装置可以模拟直升飞机或固定翼飞机发射的环境条件。船载的发射架为垂直于发射甲板的门形架,在两个门形架上部安装有用于前飞模拟或悬停模拟的可运动的鱼雷挂架车,发射装置通过提升装置安装在挂架上。模拟发射架可以实现悬停发射、变角发射和带速模拟发射等多种空投发射的试验。在上述发射试验中涉及到的主要参数包括:挂架运行速度、挂架发射悬停高度、挂架发射前飞投放平飞时间、变角发射角度等。与主要参数相关的辅助发射参数包括:发射气瓶工作压力、发射偿压、载雷车刹车时间、载雷车带雷运行加速度、刹车力等。
在空投鱼雷试验过程中,投放位置环境因素对鱼雷有重要影响。比如:船载发射架的随机摆动而产生的投放点三维动态偏移及加速度、发射气瓶产生的对载雷车的冲击、载雷车投放鱼雷时的速度方向、投放点周边的风力等。此类参数是试验结果分析的重要支持数据,有必要进行测试、校准,为试验提供完整的试验环境动态数据。
由于空投鱼雷在试验前的静态测试和试验后对控制系统的数据采集无法对各种试验参数数据的实时性、动态性进行描述,无法为试验过程及空投鱼雷在空中弹道初始时刻的动态参数提供可靠的基础数据分析。而空投鱼雷在空中弹道起始时刻的技术参数恰恰是影响其鱼雷空中飞行姿态的最重要数据,也是影响空投试验成功与否的关键。因此,对空投模拟发射装置的关键运动部件在发射时的动态参数的计量测试和校准是非常重要的。
1 发射架结构及运动模型分析
1.1 发射架、载雷车挂架结构原理
鱼雷高空投放模拟装置(综合发射船)包括:双体船、测控系统、水声测量校准装置、悬停模拟装置、专用发射装置、发射架、前飞模拟发射装置等组成。前飞发射装置集成了载雷车和挂架,被安放在双体船的门形发射架上,悬停发射装置安装在船尾架体中部,位置如图1所示。

图1 模拟发射装置示意图
加速装置用于投雷装置的加速,以模拟直升机前飞状态投雷。由于带有空投附件(降落伞等)的鱼雷不能直接进行管装发射,因此,作为该加速装置驱动的高压空气不直接作用在鱼雷上,而是作用在挂有空投鱼雷的载雷车上。载雷车达到预定速度后,释放空投鱼雷。载雷车运动相关部件包括滚轮、车架、轨道和活动气缸等,其结构示意图如图2所示。
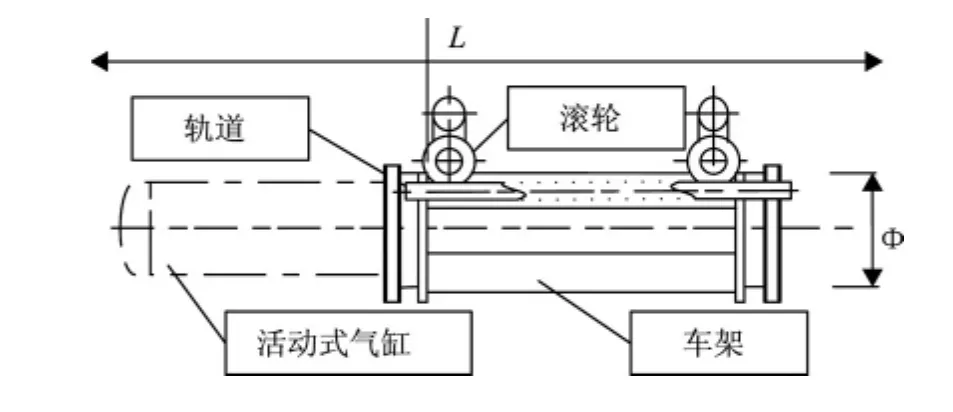
图2 载雷车挂架结构原理图
1.2 运动分析
通过对空投鱼雷发射架及挂架的运动部件和固定部件的分析研究,根据其运动原理,确定各结构部件对运动性能的影响,建立运动数学模型,解析从加速、匀速到减速过程的特征点,为传感器选型参数提供数据支持。从分析数据得出悬停状态、前飞状态及变角状态等投放模式下的挂架动态参数测量方法。
在试验起动时刻,鱼雷挂车从气动冲击得到前行动力,鱼雷及挂架处于加速运行状态。在加速运行后,转变成短暂的匀速巡行,此时,释放鱼雷。此后,挂架小车在液压刹车系统作用下开始刹车,最后停止。根据系统设计,设加速时间T1,匀速运行时间T2,减速运行时间T3,匀速时速度Vs。其理想运行速度变化曲线如图3。

图3 载雷车挂架运行速度变化曲线
事实上,在试验开始时,由于高压气瓶的冲击作用,发射架上的导向轨道必将产生振动。载雷车运动时,也一定会受到发射架轨道振动复杂噪声的影响。因此,在释放鱼雷时,鱼雷的姿态也必将受到影响。而具体影响的量化指标补偿,将可以在以下几方面的数据分析中得到,即:①载雷车运行速度、加速度测试数据;②发射架轨道三维振动冲击测试数据;③发射架轨道倾角检测数据。在变角投放鱼雷时,最重要的参数是变角角度。变角角度的静态测量和校准是必须的,但发射状态为动态过程,因此,需要根据实时测量的船体及发射架倾角姿态参数进行修正校准。
悬停投放时,投放架位置的三维姿态参数也是投放参数的重要校准数据。
2 工作原理与技术指标
2.1 工作原理
1)前飞速度测量原理
光电编码器是一种常用的精确测速传感器,根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。本方案采用增量式编码器对挂车前飞运动进行数据采集。
将增量式旋转编码器安装在鱼雷挂车的滚轮上,编码器固定采用抗震抗冲击处理,结构见图4。编码器联轴器安装在随滚轮旋转的同步传动架反向轴上,在挂车运动时,滚轮轴固定编码器不旋转只作水平运动,同步传动架随滚轮同步转动,将滚轮的转动角度信息传递给编码器,编码器检测到信号并由编码器组件内的电路、软件进行处理并保存。

图4 编码器安装结构
鱼雷挂车前进速度计算方法:设滚轮半径R,滚轮周长C=2πR,转动圈数为n,移动时间为t时,水平速度V=n·C/t。
编码器分辨力为Pn=2000 p/r(即每圈2000个脉冲)时,根据在一定时间内检测到的脉冲数,就可以计算出鱼雷挂车前进的速度。
设旋转编码器响应频率:100 KHz,上升/下降时间:100 ns,系统采样频率设定为1 MHz,即可满足波形采样的完整性。在实际数据分析时,采样间隔取0.1 ms,即10000点/秒,可以绘制出速度变化曲线并满足测量精度与数据分析的要求。
现场数据采集检测电路以单片机为控制核心,旋转编码器配置信号放大电路、A/D转换电路、数据保存芯片、时钟、现场电源等部件,组成现场测试与数据采集组件,用以检测旋转编码器输出脉冲并计算滚轮转速和鱼雷挂车的运行速度。试验后,现场传感器组件采集到的数据通过RS485数据接口传送到主机,用以进行数据分析。
2)冲击振动测量原理
系统采用轴加速度传感器进行冲击振动测量。由于发射过程是以高压气瓶的气动力为发射动力,由此而产生的对发射架和鱼雷挂车轨道的冲击和振动也是不可避免的。而鱼雷挂车和固定在发射架上的结构部件位于发射架顶部,也将产生瞬时多维摆动。因此,将冲击测量传感器安装在发射机顶部轨道初始段位置,可以准确测量冲击的影响。由于该安装位置在非运动结构架上,因此,可以用屏蔽电缆将传感器连接的放大器信号引出到船上工作台位置,实时进行数据采集。工作原理见图5。
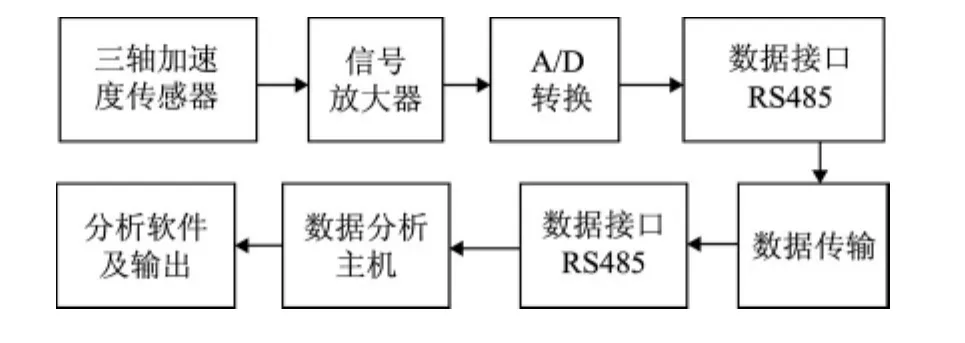
图5 冲击测量原理
3)姿态倾角测量原理
X-Y轴倾角传感器安装在挂架小车导轨平面上,安装方式如图6。在导轨所在水平面上,当发射时产生冲击或振动导致该平面倾斜时,倾角数据实时传送到监控主机并保存。倾角传感器测量的X-Y轴倾角数据经传感器的RS485接口通过屏蔽电缆传送到监控主机。
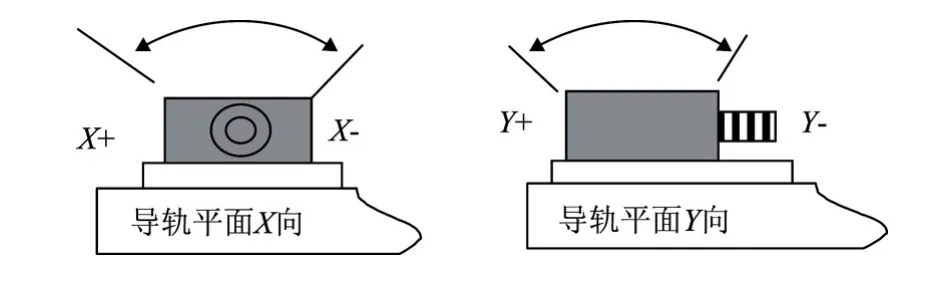
图6 倾角传感器安装方式
4)采样初始点同步原理
系统采用现场分离式和在线检测式综合数据采集模式。用旋转编码器组件对鱼雷挂车的速度数据采集为现场分离式采集方式。因测速传感器需要随载体高速运动,因此,不适宜采用长距离的通讯线路。采集的实时数据保存在测速组件的存储器内,试验进行后,从其通讯接口读出。冲击和倾角数据采集为在线检测方式。上述两种方式数据采集存在的问题是起始时间的统一模式。
由于整个系统的运动是从高压气瓶的开启而起动的,无论是倾角数据的变化、冲击数据的变化还是挂车的水平运动,起始信号都是高压气瓶的冲击推力。因此,在离线的旋转编码器组件内集成一个水平方向的加速度传感器并配置信号放大器,将起始冲击信号设定阈值,作为速度采集的起始点时间。该冲击信号值与三轴加速度传感器的X轴(水平横向)信号相一致,从而使系统数据采集起始时刻相一致。

图7 采样初始点同步原理
2.2 技术指标
最大速度测量误差:(40±0.025)m/s;
投放高度测量补偿误差:±0.1 m;
前飞投放平飞有效采样时间:0~5 s;
载雷车加速距离:(3±0.1)m;
发射架稳定参数测量误差:横摇、纵摇≤±0.01°;
系统采样频率:1 MHz。
3 数据采集与分析
3.1 数据分析软件
完成测试及数据采集后,数据分析软件将得出以下分析数据:①鱼雷及挂车的运行加速度、速度、加速运行距离、匀速运行距离、投雷点相对位置;②挂雷车轨道冲击振动三维数据分析曲线;③水平导轨动态倾角变化分析曲线、投雷点垂直面位移数据。
根据系统特点,采用VC++实现实时数据采集、整理和保存。在离线数据分析阶段采用Matlab数据分析软件进行。从空投试验开始到鱼雷投放结束,系统采样时间小于2 s,并且采样环境存在冲击和振动等干扰,因此,各个传感器采集的数据不可避免地存在数据噪声和奇异点等特征。Matlab软件提供了大量的数据处理函数可以有效地解决上述问题,为试验结果提供合理有效、准确的分析数据。例如,在旋转编码器对挂车水平前飞速度采集时,由于导轨的冲击和振动,编码器输出的计数信号有可能出现较大的波动。Matlab中提供了快速实现多项式拟合的方法polyfit()函数。该多项式拟合的目的是使整体的拟合误差达到最小。假设在某一数据段的1 ms内采集11个数据,x表示时间采样点,y表示速度采样值。为了用polyfit,我们必须给函数赋予数据和我们希望最佳拟合数据的多项式的阶次。如果我们选择n=1作为阶次,得到最简单的线性近似。通常称为线性回归。相反,如果我们选择n=2作为阶次,得到一个2阶多项式。现在,我们选择一个3阶多项式。Matlab代码和运行结果如下:

由图8可以看出在速度采样值波动较大时,经过曲线拟合处理,可以有效获得准确的采样分析数据。

图8 速度波形拟合
3.2 速度采集误差分析
影响鱼雷挂车水平运动速度、加速度检测精度的原因主要有滚轮抖动误差、脉冲采集误差和安装同轴误差。
1)滚轮抖动误差
滚轮抖动误差主要是由于运行轨道的冲击、振动而导致的滚轮摩擦力的动态变化。传导至编码器,使输出信号周期与相位改变。可以采用独立的随挂车在轨道上运动的防震防滑滚轮结构设计而消除或降低误差。
在实际数据分析时,可以根据旋转编码器的分辨力、滚轮实时速度和运行距离计算的脉冲数对实时采样丢失数据进行拟合补偿。
在实时采集数据情况下,假设滚轮周长500 mm,水平运行距离20 m,时间为1 s,则滚轮转速40 r/s,速度波动范围是(40±1)r/s,最大与最小相差为2 r/s。稳速误差为

式中:k为增量编码器旋转一周输出的信号脉冲个数。编码器精度k=2000时,δ1=3.24″。
2)脉冲采集误差
脉冲采集误差是由于编码器输出信号频率过高而数据采集系统采样速率较低造成数据采集误差。系统采样频率为1 MHz时,对编码器输出信号进行采集时,可能造成Δχ=1/1000000的采样误差。
当速度为40 r/s时,误差取得最大值为

3)安装同轴误差
通过刚性联轴节将编码器与滚轮连接,联轴节安装误差是支架设计时已经限定。其误差最大为δ3=±2"。
4)误差合成
滚轮抖动误差、脉冲采集误差和安装同轴误差是独立存在的误差。因此,系统总的误差为

在速度波动范围是(40±1)r/s时,系统测量误差为6.43″,完全可以满足使用要求。
4 结束语
本文通过对空投模拟鱼雷发射架结构及挂架运动模型的研究、对空投鱼雷模拟试验发射过程的环境数据采集方法的研究、对数据采集传感器的适应性研究,配置了高精度、高可靠性、高稳定性、动态检测元件和设备,采用现场分离部件同步采样、实时动态数据存储和集成式数据采集分析技术,设计了空投鱼雷发射挂架动态数据采集分析系统。从而提高靶场试验数据的可靠性和权威性。同时,使试验数据更加准确,为各试验参试单位和部门提供科学、完善的数据分析环境,提高我国水中兵器湖上试验水平,加快空投鱼雷的研制和试验进程。
[1]杨世兴.空投鱼雷技术[M].昆明:云南科技出版社,2001:352-378.
[2]高俊荣.水下武器试验与评价要览[M].昆明:七五0试验场,1999:402-403.
[3]杜颖财,王希军,王树洁,等.增量式编码器自动检测系统[J].电子测量与仪器学报,2012,26(11):993-998.
[4]宋叶志,贾东永.MATLAB数值分析与应用[M].北京:机械工业出版社,2014:334-335.
