海南联网混合输电线路行波故障测距系统
2015-12-02王泰净梁凤强李亚会
王泰净 梁凤强 李亚会 周 京 李 京
1.中国南方电网超高压输电公司广州局 广东 广州 510405
2.山东理工大学电气与电子工程学院 山东 淄博 255049
0 引言
目前应用比较广泛的高压输电线路测距方法主要有阻抗法和行波法[1-4]。与阻抗法相比,行波法不受过渡电阻、线路参数、互感器误差以及故障类型等因素的影响[5-7]。并且由于行波在线路中的传播速度较为稳定,使得测距精度得以保证,因而在实际故障测距系统中得到了广泛的应用[8-11]。但对于架空线路-海缆混合线路来讲,由于这种线路结构应用较少,因此国内外尚无此方面的应用案例。针对我国第一个500kV超高压、长距离和较大容量的跨海联网工程—海南联网工程,研究基于行波原理的架空线—海缆混合线路准确故障测距技术,对于快速查找和修复混联线路故障,从而提高供电可靠性,具有重要的理论和实际意义。
为了解决上述问题,本文设计了海南联网混合输电线路行波测距系统总体方案并分析了适用于架空线—海缆混合线路的行波测距原理,开发出适用于海南联网500kV架空线—海底电缆混合输电线路的混合线路行波测距系统和行波测距终端装置。
1 海南联网工程测距系统总体方案
海南联网工程北起500kV湛江港城站,南到海南福山站,湛江港城变—徐闻高抗站全长110.227km,徐闻高抗站—南岭海缆终端站全长14.184km、经过31.4公里海底电缆,在林诗岛终端站登陆。林诗岛终端站—福山变电站全长13.468km,线路结构图如图1所示。

图1 海南联网工程线路结构
其中的500kV湛江港城站—南岭海缆终端站为架空线路,南岭海缆终端站—林诗岛终端站为海缆,林诗岛终端站—福山变电站为架空线路。
其总体方案是在500kV湛江港城站、徐闻高抗站和福山变电站各安装一套站端行波采集系统,包括GPS同步时钟、行波采集装置、数据处理与远传装置,构成如图2的系统:

图2 海南联网工程总体方案
行波初始时刻准确标定的问题通过使用GPS精确对时保证基准时间精度,通过高速数据采集完整记录初始行波并记录启动时刻,通过二进小波变换准确识别初始行波起始点,进而获得了精确的可供计算使用的行波初始时刻。
3个站之间互相构成双端测距系统,且互为备份,显而易见,海缆故障时可靠性大大增强。且由于南岭海缆终端站和林诗岛终端站目前不具备安装行波测距装置的条件,无供电电源、TA、TV,故本方案工程实施更容易。
2 故障测距原理
2.1 双端D型行波测距原理
对于500kV广东湛江侧到徐闻高抗站的纯架空线输电线路,本系统采用双端D型行波测距原理,即利用故障初始行波到达500kV广东湛江侧和徐闻高抗站测量点的时间差值来给出测距结果。如图3所示。根据故障初始行波到达线路两端母线的时间差,可计算故障距离:
其中S表示广东湛江侧测距装置,R表示徐闻高抗站测距装置,XS、XR分别为故障点到线路两端测量装置的距离,为行波在架空线中的传播速度,L为线路全长,tS和tR分别为故障初始行波到达线路两端测距装置的绝对时刻。

图3 双端测距原理示意图
2.2 基于时间中点的双端测距方法
而对于徐闻高抗站到500kV福山变电站的架空线—海底电缆—架空线3段混合输电线路,本系统采用时间中点法来实现故障测距。如图4所示,以故障点F位于线路RQ段为例,线路RQ表示徐闻高抗站到南岭海缆终端站的架空线路,线路QP表示南岭海缆终端站到林诗岛终端站的海底电缆线路,线路PN表示林诗岛终端站到500kV福山变电站侧的架空线路,LRF表示故障点F到R端的距离。
其具体步骤如下:
1)确定混合线路RN的结构参数,包括各段线路长度以及行波在海缆和架空线的实际波速度v1、v2。
2)根据已知的线路结构参数确定混合线路的时间中点T0(行波信号从该点传播到混合线路两端的时间相等)以及行波在T0Q段海底电缆、QR段架空线、T0P段海底电缆以及PN段架空线中运动的时间 t1、t2、t3和 t4。
3)确定故障搜索方向。设在线路R端和N端检测到的行波波头到达时间分别为TR、TN,定义时间参量 Δt=TR-TN。 以向 R 端搜索为例,若 Δt/2<t1,则故障点在 T0Q 段海底电缆内,若 Δt/2>t1,继续向前搜索,然后判断Δt/2与t1+t2的关系,判断出t1<Δt/2<t1+t2,从而初步确定出故障发生在QR段架空线中。
4)确定故障点。 计算出参量 Δt’=Δt/2-t1,进而求出行波从Q点开始以波速v2在QR段架空线中运动Δt’时间到达故障点F。故障点距离R端的距离可以由式 LRF=(t2-Δt’)×v2给出。
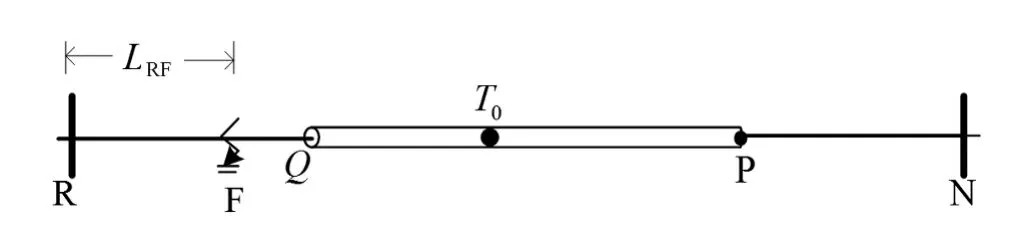
图4 混合线路结构图
3 行波测距终端装置
3.1 行波测距终端装置的结构
行波测距终端装置采用2U,19英寸标准金属机箱。前面板包括电源、运行、时间同步、触发、通信、数据6个指示灯。后面板是插箱式插板,共有9块,分别为POWER插板、STANDBY插板、COMM.插 板 、TIME SYNC. 插 板 、DIGITAL I/O 插 板 和ANALOG INPUT 插板 (包括 AI1/AI2/AI3/AI4 插板)。
3.2 基本工作原理
行波测距终端装置构成原理框如图5所示。它包括中央处理单元 (CPU,central processing unit)、模拟信号输入电路、高速数据采集单元(DAU,data acquisition unit)、高精度时钟与同步信号接收电路、通信接口、开关量(DO,digital output)输出电路、开关量(DI,digital input)输入电路、人机接口电路和开关电源等几个基本组成部分。

图5 行波测距终端装置的构成原理框图
1)中央处理单元
中央处理单元(CPU)是行波测距终端装置的核心单元,其主要功能是读取、处理来自高速数据采集单元的暂态行波数据,缓存行波记录并根据选定的通信规约将行波记录上传至行波分析主站。CPU还协调整个装置的工作,完成时间同步、整定配置参数管理、运行状态指示、装置触发与故障报警等功能。
2)模拟信号输入电路
模拟信号输入电路完成电流、电压输入信号的转换、滤波、放大等功能,将来自电流、电压互感器的暂态行波信号调理成满足A/D转换输入要求的小信号。
3)高速数据采集单元
为使行波测距分辨率达到200m,暂态行波信号采样频率不应低于1MHz,而采用常规的由微处理器(MCU)直接控制的A/D转换与数据采集技术难以满足要求。行波测距终端装置采用独立于MCU的硬件数据采集电路,实现了暂态行波信号高速记录。
4)高精度时钟与时间同步信号接收电路
高精度时钟电路产生精度达μs级的时间信号,送给高速数据采集单元,供其精确标定触发时刻。
时间同步信号输入有IRIG-B与1PPS两种方式。
采用IRIG-B同步方式时,同步信号接收电路接收并解码IRIG-B格式的时间同步信号,形成1PPS秒同步脉冲与时间信息(精确到秒)。1PPS脉冲用于同步高精度时钟电路,消除走时误差。时间信息用于同步中央处理单元时钟的对时。
采用1PPS同步方式时,同步信号接收电路直接接收1PPS秒同步脉冲,用于同步高精度时钟电路。时间信息通过时间信息输入接口(TIME SYNC.,RS-485 接口)输入。
5)通信接口
包括两个RS-232接口(COM1和COM2)和一个以太网接口。以太网接口用于以网络通信的形式上传行波记录。两个RS-232接口均可外接调制解调器(MODEM),以电话拨号的形式上传行波记录。一个RS-232接口支持以点对点串行通信的形式上传行波记录,另一个RS-232接口用于装置整定配置与维护通信。
6)开关量输出电路
包括两对光电隔离的空接点输出,分别用于装置启动与自检异常报警。接点输出可根据现场应用要求送至变电站监控系统或故障信息管理系统。
7)开关量输入电路
包括一对光电隔离的空接点输入,用于装置接外部的开关量信号输入,可以是保护装置的动作信号或断路器的动作信号等开关量信号输入。
8)人机接口电路
产生装置运行状态指示信号,包括启动(触发)指示、时间同步信号正常指示、装置异常指示、通信指示等。
9)开关电源
接入110V或220V交/直流输入,产生装置内部电路使用的直流电源。
4 行波故障测距系统分析软件
4.1 运行环境
1)分析软件运行的硬件环境
X86系列Pentium II 366以上的台式机或笔记本
2)分析软件运行的软件环境
(1)1Windows 95/98;
(2)Windows NT 4.0;
(3)Windows 2000 Profession;
(4)Windows XP;
(5)Windows 7。
3)系统的外部连接
在分析软件启动之前,首先需要建立计算机与外部设备的连接。分析软件需要与前置故障检测装置通过串口建立连接,连接线缆为普通的串行通讯线,可以仅使用最基本的信号线:地线—5;接收信号线—2;发送信号线—3。
4.2 主要功能
行波故障测距系统行波分析软件是Windows程序,主要完成:
1)自动或人工远程提取厂站端行波采集与处理系统的暂态启动报告,并永久保存;
2)自动进行双端行波故障测距;
3)架空线路-电缆混合线路测距;
4)杆塔定位;
5)提供人工波形分析功能以便对单端和双端行波故障测距结果进行验证和校正;
6)变电站内行波测距终端装置的运行监视;
7)历史故障及测距结果统计、查询;
8)故障报表。
运行行波故障测距系统行波分析软件的主站PC机至少应具有一个RS-232串口和一个网络口。串口用于采用拨号网络时连接Modem,网络口用于连接串口服务器以支持主站和变电站装置的点对点通讯。
4.3 杆塔定位和混合测距功能
混合线路是指在架空/电缆混合线路。
杆塔是架空输电线路中用来支撑输电线的支撑物。配置和测距时可逐级计算。
对于海缆线路来说,海缆线路由于在海底铺设,没有明确的海上指示物,故需要采用地理经纬度来标识海缆的路由位置,即逐段标识电缆的位置坐标。
杆塔定位和海缆线路测距功能实现时统一进行配置和实现。
5 结束语
行波测距是目前公认的电力线路最为精确、使用范围最宽的故障测距技术,且已有在较低电压等级的电缆线路和超高压输电线路故障测距的成功先例,行波法对于500kV超高压架空—海缆混合线路故障测距是可行的。本文针对海南联网混合输电线路设计了行波测距系统总体方案,并分析了适用于架空线—海缆混合线路的行波测距方法,即双端D型行波测距方法与时间中点法,并详尽介绍了针对超高压架空—海缆混合线路研制的混合线路行波测距系统系统和行波测距终端装置。
下一步,可以将研制的混合线路行波测距系统系统和行波测距终端装置挂网运行,以验证测距系统成果并为推广使用做准备,为海南联网工程的运行做出贡献。
[1] Li Zewen,Yao Jianggang,Zeng Xiangjun,Deng Feng.Power grid fault traveling wave network protection scheme[J].Electrical Power and Energy Systems,33(2011) 875-879.
[2]刘伟,陈皓.基于分布参数模型的混合线路故障测距新算法[J].电力系统保护与控制,2009,12(24):76-80.
[3]杨军,伍咏红等.基于双端故障信息的高压电缆—架空线混合线路故障测距方法 [J]. 电网技术,2010,1(1):209-213.
[4]邬林勇.利用故障行波固有频率的单端行波故障测距法[D].成都:西南交通大学,2009.
[5] 10 Lee H.,Mousy A M.GPS Traveling Wave Fault Locator Systems:Investigation into the Anomalous Measurements Related to Lightning Strikes.IEEE Trans on Power Delivery,2006,11(3): 1214-1223.
[6] T.Johns.P.Agrawal.New Approach to Power Line Protection Based on the Detection of Fault Induced High Frequency Signals.IEEE Trans on Power Delivery,2006,137(4): 307-314.
[7]于桂音,陈平,徐丙垠等.基于行波原理的优化组合故障测距技术[J].继电器,2008,36(9): 11-15.
[8]邹丽生.WFL2010输电线路故障测距系统在李家峡水电站的应用[J].青海电力,2006,25(2):22-25.
[9]张勇.WFL2010输电线路故障测距系统项目后评价研究[D].长春:吉林大学,2007.
[10]陈平.输电线路现代行波故障测距及其应用研究[D].西安:西安交通大学,2003.
[11]王翔.行波测距技术在电力系统中的应用[J].上海电力,2011,(2):121-125.
