一种复杂环境中的车牌定位算法
2015-12-02曹雪虹
李 耀,程 勇,曹雪虹,
(1.南京邮电大学 通信与信息工程学院,江苏 南京 210003;2.南京工程学院 通信工程学院,江苏 南京 211167)
车牌识别(License Plate Recognition,LPR)是模式识别和机器视觉应用在智能交通系统领域中的一个重要研究课题,在公共安全、交通监测和管理以及电子收费系统等方面具有重要的应用价值。车牌定位是车牌识别中的一项关键技术,其准确度直接影响着后续的字符分割和识别。
车牌定位是基于车牌区域的特征将车牌区域从车牌图像中分割出来。常见的车牌定位方法有:1)基于灰度图像纹理特征的分析方法[1]。此类方法一般先利用图像处理的手段获取车牌图像的纹理特征,并基于车牌区域纹理特征独有的特点搜寻车牌区域在整幅图像中的位置。但基于纹理特征的车牌定位方法对于噪声比较敏感,且受光照因素影响较大,需结合光照鲁棒的方法提升其准确度。2)基于数学形态学的车牌定位算法[2-3]。此类算法一般在对车牌图像进行二值化后,利用结构算子对二值化图像进行腐蚀运算和闭运算消除噪声,并形成闭合的连通区域。然后计算出每个连通区域的外接矩形框,利用车牌区域的一些特点完成车牌定位。3)基于小波变换的车牌定位算法[4]。小波变换将输入的原始车牌图像信号分解成一系列不同分辨率、不同频率特性的子带信号,然后利用这些信号的特性完成对信号在时域和频域的局部变换。4)基于神经网络的车牌定位算法[5]。为了提高车牌定位的速度和准确度,通常情况下,基于神经网络的车牌定位算法要求车牌特征保持基本不变,如果牌照特征发生了较大的变化,那么就必须对神经网络重新训练,而对于车牌采集环境的复杂性来讲,车牌特征常常发生较大范围的变化,所以对于在不同环境中采集到的车牌图像利用神经网络进行车牌定位往往达不到满意的效果。5)基于车牌区域颜色特征的车牌定位算法[6]。该算法主要是根据车牌底色和字符颜色只有固定几种颜色搭配的特点,通过提取图像中的颜色信息结合其他算法来进行车牌定位。由于车牌图像在不同的光照条件下有一定程度的色偏,所以需要考虑对车牌图像进行颜色校正。上述车牌定位方法都有各自的优缺点,但值得指出的是,目前尚未发现性能能够全面超越其他方法的某一车牌定位算法。
本文提出了一种基于车牌图像边缘特征和梯度方向特征的车牌定位方法,其主要任务是消除干扰边缘并尽可能保留车牌区域的边缘特征。该方法提取车牌图像的垂直边缘,然后根据边缘长度、边缘点密度及梯度方向移除干扰边缘以凸显车牌区域位置,最后将车牌区域从原图像中分割出来。
1 车牌图像处理
在本方法中,输入的车牌图像首先会被转换为384×288像素的灰度图像。车牌图像背景中的树叶、建筑物、走廊和倒影等会产生大量的密集干扰边缘。此时,仅依靠边缘长度来去除干扰边缘的效果通常不够理想。相比之下,本文提出的方法能够很好地从边缘图像中消除此类干扰边缘。
1.1 边缘图像获取
1)灰度变换
原始的RGB图像包含的数据量较大。为加快后续的图像处理过程,本文首先利用一个灰度变换公式将原始的彩色图像转换为灰度图像,利用加权平均的方法完成灰度转换,表示为

2)垂直边缘提取
车牌周围的背景区域存在较多的水平边缘,且该区域中比较常见的是一些较长的边缘和随机噪声。而车牌区域的边缘较为集中,具有强烈的纹理特征。如果只提取车牌图像的垂直边缘,则会损失少量车牌区域的水平边缘信息,但大量的背景区域边缘可以被移除,从而使得车牌区域在车牌图像中进一步被凸显出来。考虑到以上事实,本文利用垂直Sobel算子对灰度图像进行边缘检测以获得垂直方向的梯度图像。尽管车牌区域的少量水平边缘信息会丢失,但这种损失是值得的。垂直Sobel算子的定义为

接下来需要找到一个合适的阈值对梯度图像进行二值化。本文通过计算图像梯度的平均绝对值并将其乘以一个调节因子作为二值化阈值。最后,对梯度图像进行水平方向的非极大值抑制[7],并利用前面得到的阈值最终获得一个单边缘图像,结果如图1所示。图1a是原始图像,图1b是经过式(1)灰度变换后的图像,图1c是利用Sobel算子提取的垂直边缘图像,从图中可以看出,车牌图像背景中纷杂的树叶、建筑物以及走廊等形成大量密集的干扰边缘被凸显出来,这些会对车牌定位造成极大的干扰。
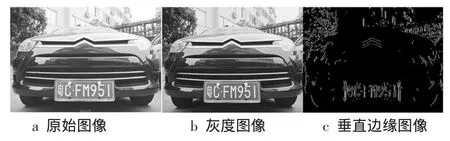
图1 处理前图像和处理后图像
1.2 梯度方向图像获取
Gradientfaces方法[8]最初用于人脸识别领域,主要任务是在不同光照条件下获取一种光照不变量。该方法对光照变化不敏感,在不同光照条件下具有较好的鲁棒性。此外,Gra⁃dientfaces方法源于图像的梯度域。因为梯度空间中梯度信息包含有相邻像素间的关系,所以Gradientfaces方法能够找出图像中隐含的固有结构。
Gradientfaces方法的实现过程如下:
1)通过将输入图像I与高斯核函数G卷积,对输入图像I进行平滑处理。

2)通过与x和y方向上的高斯核派生函数卷积来计算图像I的梯度值。

式中,Gx(x,y,σ)和Gy(x,y,σ)分别为x方向和y方向上的高斯核派生函数。
3)最后,利用等式(5)求得图像I的梯度方向图像。

这就是梯度方向矩阵G。车牌图像的处理结果如图2所示。
2 干扰边缘移除
2.1 根据边缘长度移除干扰边缘
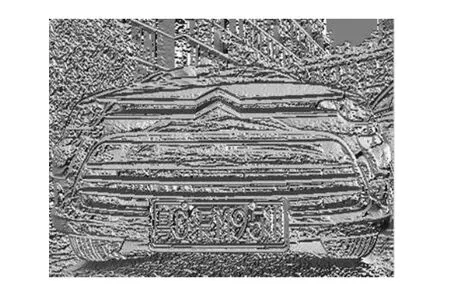
图2 利用Gradientfaces方法获取的梯度方向图像
在1.1节中获取的垂直边缘图像中存在大量过长或过短的背景边缘,它们不同于车牌区域的边缘特征。因此,本文根据边缘长度可以移除部分干扰边缘。
在本文中,M和N是与垂直边缘图像同等大小的矩阵;Tlong和Tshort均为边缘长度的阈值。算法描述如下:首先,从左到右从上到下扫描边缘点并将对应边缘点累计的边缘长度记录在矩阵M中;然后,从右到左从下到上扫描图像中的边缘点,并将对应边缘点累计的边缘长度记录在矩阵N中;最后,计算M和N的和矩阵,若该矩阵中某个值大于Tlong或小于Tshort,则消除掉边缘图像中对应的边缘点。
这里,边缘长度是当前像素Pi,j的相关邻域像素值的累积。如图3所示,阴影网格表示当前像素的相关邻域像素。
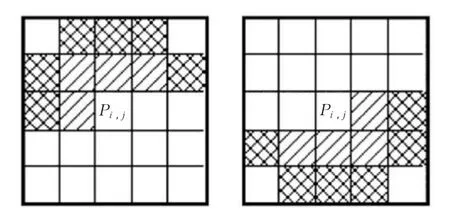
图3 Pi,j的相关邻域像素
2.2 根据边缘密度移除干扰边缘
因为车牌图像的车牌区域具有高度集中的边缘信息,边缘点相对稀疏的区域可以被排除,据此可以消除边缘图像中此类区域中边缘点。
本方法利用一个以边缘点为中心的小矩形窗口(如32×24)从左到右从上到下对经2.1节处理后的边缘图像进行扫描。如果窗口内的边缘点所占比例低于某个阈值,则将窗口中所有的边缘点全部移除。
2.3 根据梯度方向移除干扰边缘
为了降低这一步骤的复杂度,本文首先对1.2节中获取的梯度方向矩阵G求取绝对值,将其中的负值取正。观察车牌特点可知,在矩阵G中,车牌区域中边缘点的梯度方向主要集中在0°,45°,90°,135°,180°左右。对于矩阵G中在指定取值范围内的值,利用2.1节的方法重新统计2.2节中得到的边缘图像中对应位置边缘点的边缘长度。值得注意的是,此次统计除了需要考虑当前像素的相关邻域像素是否为边缘点外,还要考虑邻域边缘点的梯度方向是否与当前边缘点的梯度方向相近,只有两个条件均符合时方可将两个边缘点视为在同一条边缘上。然后重新设定一个阈值Tshort,消除边缘长度小于Tshort的边缘点。处理结果如图4所示,图4a是经过2.1节的方法处理后的图像,图4b是经过2.2节方法处理后的图像,图4c是经过2.3节方法处理后的图像,可以看到,原边缘图像中大部分的干扰边缘已被移除。
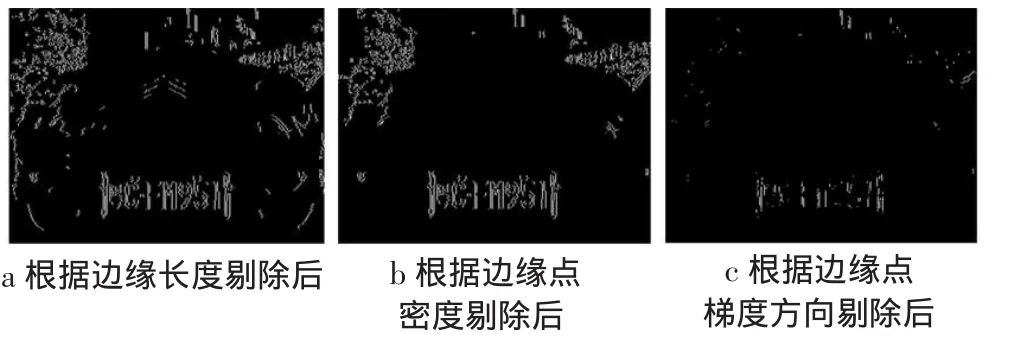
图4 干扰边缘剔除结果
3 车牌检测与分割
在经过上述若干步处理后,原大部分的干扰边缘已被移除的情况下,利用一个比车牌区域稍大的全1矩阵与处理后的边缘图像做卷积运算。找出卷积结果中最大值的位置,以最大值位置的对应点为中心从原车牌图像中将车牌区域分割出来。分割出的车牌区域如图5所示。

图5 车牌定位结果
4 实验结果与分析
在仿真实验中,笔者用本文方法对来自不同拍摄环境中的301幅车牌图像进行处理。这些图像均具有较复杂的背景,且拍摄于各不相同的光照环境中,如多云、阴雨天、白天、晚上等等。一些示例图像及它们的处理结果如图6所示。

图6 车牌图像及定位结果
实验结果显示,大部分车牌区域可以被成功地从车牌图像中分割出来,其定位准确率为93.7%。此外,笔者将本文方法与文献[9]和文献[10]的方法分别进行对比,三者均应用于同一实验环境中,后二者的定位准确率分别为89.7%和90.4%。结果显示文献[9]的方法在复杂背景情况下受干扰严重,会出现定位不准的现象;文献[10]的方法受光照偏色影响较大,在光照条件不理想或车牌颜色失真时效果会大打折扣;而本文方法在应对复杂背景或光照不足的情况时具有更高的定位准确度和更好的适应性。
5 结论
本文提出了一种有效的车牌定位方法,该方法结合车牌区域边缘特征和梯度方向特征进行车牌定位。实验结果表明,本文方法定位准确度高,且对不同环境具有良好的适应性。因此,该方法对车牌定位具有很高的实际应用价值。
[1] DU Yuren,SHI Wen,LIU Caiyun.Research on an efficient meth⁃od of license plate location[J].Physics Procardia,2012(2):1990-1995.
[2]REZAIE F A H,ZIARATHAN M.A morphological-based license plate location[C]//Proc.IEEE International Conference on Image Processing.[S.l.]:IEEE Press,2007:57-60.
[3] WANG Aili,LIU Xusheng,HAN Yuhui,et al.License plate loca⁃tion algorithm based on edge detection and morphology[C]//Proc.2012 7th International Forum on Strategic Technology(IFOST).[S.l.]:IEEE Press,2012:1-4.
[4] 陈欢.基于小波分析的车牌识别系统的研究[D].西安:西安电子科技大学,2013.
[5] 岳兆新,曾黄麟.一种改进的基于边缘特征提取BP网络车牌定位的新方法[J].计算机应用与软件,2011(12):97-103.
[6] XIE K,WANG K.A new method of license plate location based on multi-threshold quantization segmentation of color image[C]//Proc.3rd International Symposium on Information Processing.[S.l.]:IEEE Press,2010:9-13.
[7] ZHENG D,ZHAO Y,WANG J.An efficient method of license plate location[J].Pattern Recognition Letters,2005,26(15):2431-2438.
[8] ZHANG Taiping,TANG Y Y,FANG B,et al.Face recognition under varying illumination using gradientfaces[J].IEEE Trans.Im⁃age Process,2009,18(11):2599-2606.
[9] NEUBECK A,GOOL L V.Efficient non-maximum suppression[C]//Proc.18th International Conference on Pattern Recognition(ICPR).[S.l.]:IEEE Press,2006,3:850-855.
[10] TAN Chang,CAO Jun.An algorithm for license plate location based on color and texture[C]//Proc.2013 Fifth International Conference on Intelligent Human-Machine Systems and Cyber⁃netics.[S.l.]:IEEE.Press,2013:356-359.
