ABB机器人激光熔敷系统离线编程与应用
2015-12-02刘建永
杨 伟,刘建永
YANG Wei, LIU Jian-yong
(湖北汽车工业学院 材料科学与工程学院,十堰 442002)
0 引言
随着我国制造业水平的不断进步,对工业机器人技术与自动化装备的需求迅速增长,机器人的应用范围日趋广泛。机器人是可编程的机械装置,其功能的灵活性和智能化很大程度上决定于机器人的编程能力[1]。机器人编程方式可分为示教再现编程和离线编程两种形式。目前,在国内外生产中应用最为广泛的机器人系统大多仍为示教再现型。但是,示教编程在实际生产应用中存在有如下一些问题:1)机器人的在线示教编程过程繁琐、效率低下,在编程时必须停止生产,影响生产效率;2)示教的质量完全靠编程者的经验目测决定,对操作人员要求较高,而且对于复杂和空间路径难以取得理想的效果[2];而离线编程系统可以大大提高机器人编程效率,是实现系统集成的必要的软件支撑系统。与示教编程相比,离线编程系统具有如下优点:1)减少机器人停机的时间,当对下一个任务进行编程时,机器人可仍在生产线上工作;2)使编程者远离危险的工作环境,改善了编程环境;3)离线编程系统使用灵活,可以对机器人各种工作对象进行编程,并能方便地实现优化机器人运行姿态;4)便于和CAD/CAM系统结合,发挥各自系统优势[2],因此,离线编程引起了人们的广泛重视,研究和应用机器人离线编程技术是提高机器人作业自动化水平的必然趋势。
1 系统平台搭建
有完整的系统模型是离线编程的基础,而完整的机器人激光熔敷系统一般由以下六部分组成:工业机器人、变位机、机器人控制系统、激光加工系统、送粉系统和中央控制系统等。
笔者所使用机器人是瑞士ABB IRB4600,变位机是IRBPA,激光器使用的是LASERLINE半导体光纤耦合激光器,最大输出功率可达3kW,主要编程软件是DCAM。
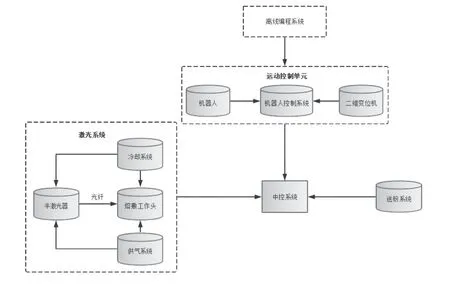
图1 激光熔敷系统组成框架图
DCAM具备CAD功能,也支持UG等多种三维软件建模后导入模型,可用于构建工作平台和工件模型,与机器人模块一起构成机器人作业系统,模拟出一个逼真的工作场景。将各部件添加进软件,进行装配并定义各部位运动学参数。定义激光器熔敷头出光焦点处为TCP(Tool Center Point)。TCP位置和矢量方向要与实际机器人末端工具在编程时所使用的位置和矢量方向一致。

图2 机器人激光熔敷系统作业现场
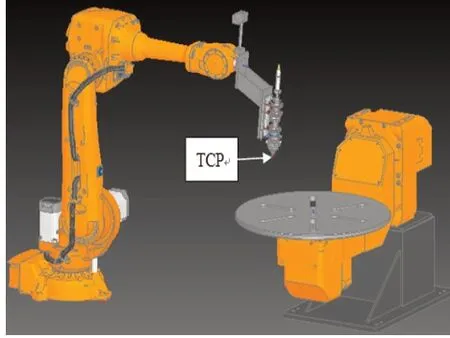
图3 CAD建模构建的机器人工作场景
2 运动路径规划
首先使用CAD功能进行建模,导入到编程系统中,在模型上设计提取所需运动路径,在该路径上根据线条特征,分离出TCP运动时所需要的各节点,调整各节点的矢量方向,优化控制机器人姿态,然后利用MovL、MovJ或MovC等插补指令,控制TCP从一节点向下一节点移动。在移动过程中,通过送粉器向熔覆头同轴送粉,粉料在匀粉环的作用下在汇聚于激光焦点处,在激光扫描时熔化,随后激光熔池冷却堆积形成所需表面。

图4 运动路径规划作业流程
3 运动编程
图形化编程是目前大多数机器人离线编程系统采用的方法,然而这种编程方式对于复杂路径来说工作量仍是相当大的[3]。而DAM软件可根据分离出的各节点矢量,自动生成所需的路径插补指令,并可以方便地对各节点矢量进行调整。为了体现离线编程的优势,笔者用激光熔敷打印了空心“汽车”两个字,熔敷高度4mm,每层在熔敷时的层高为0.5mm。如图所示红色、绿色、蓝色分别对应的空间曲线的弗莱纳-雪列切向单位矢量、次法向单位矢量和法向单位矢量。
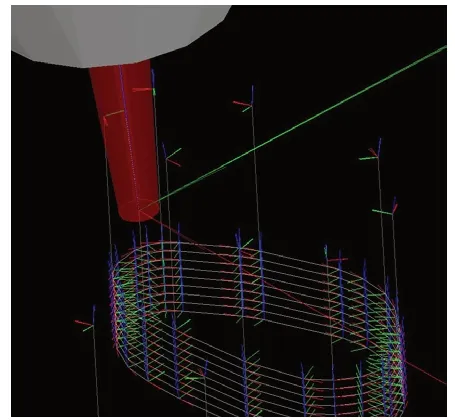
图5 运动路径编程
4 后置处理与仿真模拟
后置处理在机器人离线编程应用中至关重要,它决定了经编程后的程序是否能应用于生产实际,是整个系统中联系编程和加工的最具实用价值的环节。其中机器人逆运动学求解是其核心内容,它是根据机器人末端执行器所到达的节点的位姿,求出机器人各个关节的角度,实现对机器人姿态的控制。在后置处理的同时,还需要对所需的IO控制信号指令进行编程,以便在自动工作时响应外部设备。经过后置处理生成所需的机器人程序指令代码。
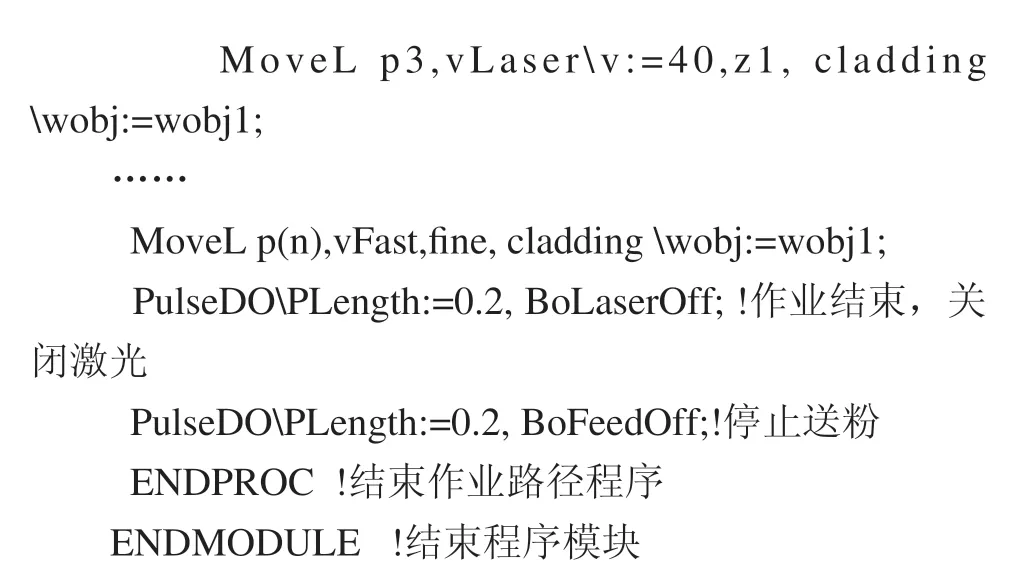
在仿真时,为了保持仿真与实际运动的一致性,笔者除了使用DCAM进行仿真以外,还将程序模块导入RobotStudio中进行运动仿真,分析其运动的可达性、平稳性以及是否发生干涉等,以验证作业程序的正确性。其完整的程序模块结构如下:

5 试验验证
经仿真无误的情况下,将程序模块CLXYLASER.MOD同步到机器人控制器中,实地加工验证。经试验发现,机器人运行路径和仿真模拟完全一致,整个作业过程运行平稳流畅,所打印出的空心“汽车”二字字迹轮廓清晰,高度均匀一致,效果完全满足了实际应用需要,效果良好。
6 结束语
1)采用离线编程,能极大提高编程效率和精度,而且可以通过可视化仿真来对运动进行修正,提高机器人工作时的安全性。

图6 试验验证结果
2)该离线编程系统实现了机器人和变位机之间的联动,对于复杂路径运动编程有较大应用优势。
3)经仿真后的程序指令传输到控制器中后,无需再做任何修改即可直接运行,证实该系统的有着良好的可靠性,是实现生产自动化的关键,有着广阔的应用前景。
[1]王克鸿,刘永,许越兰.弧焊机器人离线编程系统[J].焊接学报,2001,22(4):84-87.
[2]Yocam Regev.The evolution of off-line programming[M].Industrial Robot,1995,22(3):3.
[3]姜蓓.机器人等离子切割离线编程技术[D].上海:上海交通大学,2008.
