基于金字塔形寻优的传送带动态抓取研究
2015-09-13张朝阳周惠兴曹荣敏吴小艳
张朝阳,周惠兴,曹荣敏,吴小艳
(1.中国农业大学 工学院,北京 100083;2.北京信息科技大学 自动化院,北京 100192)
0 引言
对废旧金属进行回收有利于环境保护;继而分选归类,是进一步提高其经济价值的有效手段,更是发展循环经济的重要内容。依托于国家智能化节能环保型废金属破碎分选生产线研制项目(发改办高技[2012]2144号),具体研发一台基于机器视觉的智能分选机器人,实现项目的部分智能化要求:对非铁物质中铜、铝等有色金属进行光学色谱分析识别和自动分拣。
整体方案设计:经过磁选后,待分拣废金属物块由传送带源源不断送来。当进入摄像机视野时,摄像机摄取当前传送带的快照并送入PC机。PC根据当前的分拣策略,在快照中捕捉金属物体的特征,如果找到具有对应特征的物件,则将该物体在机械手坐标系下的坐标定位信息送入分拣机械手的控制器;传送带另一端的分拣机械手控制器则根据定位信息,对起止坐标进行求解,通过对比起止点的坐标值,对轨迹进行规划,继而得到机械手的动作指令,实现机械手的相应动作;最后向机械手发出控制指令,抓取金属物块放入相应的分类箱内,如图1所示。

图1 废旧金属分拣线
机械手对于随传送带移动的金属物块进行动态抓取,涉及到机械手的抓取动作要和物块的移动速度相协调:机械手要对随传送带移动的物料位置进行跟踪和预测,然后进行动态抓取动作。
传统的基于PID的跟踪方法在传送带速度相对提高时,容易造成跟踪轨迹曲率偏大,恶化跟踪效果;本文提出一种基于金字塔形寻优法的拦截技术,来改善机械手在传送带上动态抓取物料的效率,进行了理论分析和实验验证。
1 问题的提出
在传统的基于PID跟踪方法中,随着传送带的运动,机械手对物料进行持续地的跟踪,逐渐缩小二者之间的距离和相位,直到其位置和速度与目标物保持一致,此时就可以执行抓取的动作了。在这个过程中,需要实时准确的知道物料在运动方向上的位置信息。 这可以通过在传送带上安装一个数字编码器,比较当前时刻与拍照时刻编码器的差值来实现[1,2]。
在一般应用场合,当传送带的速度相对于机械手的运动速度非常缓慢时,这种传统的PID跟踪的方法是适用的,其追踪轨迹为曲率很小的线段,如图2所示。

图2 传统PID跟踪缓慢速度传送带
但是,为了提高工作效率,进一步提高传送带的速度时,其追踪轨迹的曲率将变得很大,跟踪效果变差,如图3所示。

图3 传统PID跟踪较快速度传送带
鉴于此,下文将着重从拦截技术的角度来探讨提高动态抓取效率的技术问题。
2 基于金字塔形寻优法的抓取
2.1 机械手最短抓取时间曲线
与上面的跟踪法不同,拦截技术是着眼于从目标物当前的运动位置和速度,来预测其将来某一时刻的位置;然后规划机械手的动作,使其能够通过最短的路径在某一时刻点上与目标物相遇,进而执行抓取动作。
假设机械手末端执行器位于传送带的Downstream Limit平行位置的分类箱上方,如图4所示。应用PTP的轨迹规划策略[3,4],计算出机械手从分类箱上方分别到达Downstream Limit, Pickup Limit和Upstream Limit各点上方的最短时间。其中,Downstream Limit和Upstream Limit分别为机械手在传送带上的最下和最上工作区范围线;Pickup Limit为最优抓取线(在当前的传送带速度下,如果物料向前运动超过这条线,则机械手不能在工作区范围内完成抓取动作)。

图4 机械手在传送带平面PTP抓取轨迹
以横轴表示位置,纵轴表示时间,通过对以上三个抓取点之间的数据进行插值处理或实际测量,可以得到如下的机械手最短路径抓取时间曲线,如图5所示,它是一条单调的函数曲线。

图5 机械手最短路径抓取时间曲线
2.2 最优的抓取点
下面考察传送带上物料的运动轨迹。传送带以恒定速度运行,向右上方的倾斜线t0(x),如图6所示,表示物料在传送带上随时间长短而行进的距离。其出发点为机械手开始动的作时刻,物料在传送带上的位置。它们是一组位于Upstream limit和Pickup limit之间的斜率为传送带速度平行线。

图6 时间最优抓取点
因为传送带上安装有编码器,能够记录下目标物拍照时刻的即时位置信息。这样,目标物任意时刻在传送带上的位置是一个可以实时计算出来的确定量。唯一需要确定的未知量,是机械手从上次动作结束位置,运动到本次抓取目标位置时间内,目标物在传送带平面内位置坐标的移动量。
把机械手的最短时间抓取曲线和物料的运动时间曲线结合起来,如图6所示,可以看出,在这段时间内,对于从工作区上游过来的物料,机械手最有效率的抓取方式是预先计算出物料的前进轨迹,然后进行中途拦截。最优的抓取点应该是二者的交点位置。在这一点上,机械手走过的距离最短,消耗的能量最小,工作效率最高[5~9]。
因此最优抓取问题就转化为怎样在物料的运动过程中,实时、准确地预测出二个函数的交点。
2.3 金字塔形寻优法的拦截技术
在对机械手和目标物运动轨迹交汇点的预测设计模型中,要充分考虑到两个因素:一是机械手最短时间抓取曲线和目标物运动时间曲线的单调性,保证了交点存在的必然性;二是两者的运动速度的差异性:机械手的速度一般要高于传送带的速度。正是基于这个特点,所设计的金字塔形寻优迭带迭代算法,才会具有快速的单向积聚区间,避免了算法的振荡现象,从而可以实时、准确地预测出时间最优的抓取点位置。
假设机械手开始抓取动作时的位置在分类箱的上方,此时目标抓取物在刚刚进入工作区的Upstream limit点。相同时间之后,机械手进入tr(x)曲线的B点,目标物在t0(x)曲线的A点。由于机械手的速度高于传送带的速度,所以要先到达AB的中点E。以相同的策略依次迭代计算,当机械手和目标物的距离差值到达规定的阈值后,就可以认为是找到最佳抓取点P,如图7所示。
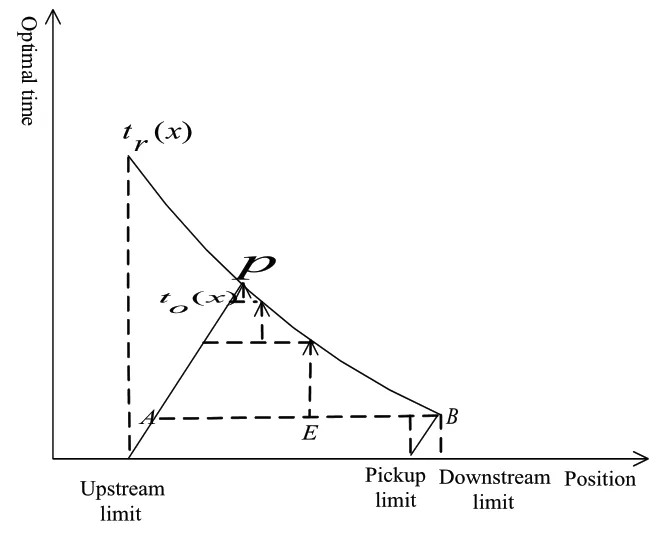
图7 金字塔形寻优迭代
具体步骤如下:
步骤1:设k=1C,选择xtk=A和xrk=B;
p=xmk停止运算;否则,转到第4步;
在实际工况中,由于负载的变化和摩擦等因素,传送带的速度可能变化,不是一个恒值。这时,可以在步骤3中加入一个PID跟踪算法。
3 实验验证
由于废金属大货样品未能及时提供,机器手传送带抓取算法实验样品用火腿肠来代替进行,如图8所示。

图8 传送带动态抓取实验
总量为1000支的火腿肠从上道工序转入传送带内,平均密度为34支/平方米。为了比较效果,第一次分拣用本文提出的基于金字塔形寻优法的拦截算法,数据结果如表1所述。第二、三次用传统的PID跟踪算法,数据显示:要分拣出相同数量的目标,传送带的速度要下降,从而工作效率下降;如果维持速度不变,则由于个别目标之间距离太短,出现了漏拣情况。

表1 实验数据
实验数据表明,基于金字塔形寻优法的拦截算法较传统的PID跟踪算法提高了大约10%的工作效率。
传送带动态最优抓取实验方案采用以下的整体程序流程,如图9所示。

图9 实验程序流程
4 结束语
针对智能化节能环保型废金属破碎分选生产线的设计要求,分析了实际的作业情况,提出了基于金字塔形寻优法的拦截算法,设计了传送带动态最优抓取控制方案,把预测拦截和伺服跟踪技术结合,实现机械手与传送带协调动作,对物料目标进行动态高速抓取,提高了分拣效率。
[1] 张祥,高速轻型并联机械手控制方法研究[D].天津,天津大学,2005.
[2] 张策,高速包装机械手视觉控制系统研究与开发[D].天津:天津大学,2007.
[3] J. M. BORG, M. MEHRANDEZH, R. G. FENTON and B. BENHABIB, Navigation-Guidance-Based Robotic Interception of Moving Objects in Industrial Settings[J].Journal of Intelligent and Robotic Systems,2002,33:1-23.
[4] T. H. Park and B. H. Lee, “An approach to robot motion analysis and planning for conveyor tracking[J].IEEE Trans. Syst., Man, Cybern.,1992,22(314):378-384.
[5] E. A. Croft, R. G. Fenton, and B. Benhabib.Optimal rendezvouspoint selection for robotic interception of moving objects," IEEE Trans Sys. Man Cybern. Part B,1998:192-204.
[6] Ik Sang Shin, Sang-Hyun Nam, Rodney G.Roberts, Seungbin B. Moon, Minimum-Time Algorithm For Intercepting An Object On The Conveyor Belt By Robot[A].IEEE International Symposium on Computational Intelligence in Robotics and Automation[C].2007.
[7] Yang, C. D. and Yang, C. C.A unified approach to proportional navigation, IEEE Trans. Aerospace Electronic Systems[C].1997,33(2):557-567.
[8] Piccardo, H. R. and Hondered, G.A new approach to on-line path planning and generation for robots in non-static environment[J]. Robotics Autonom. Systems (1991),187-201.
[9] Su, J. and Xi, Y.Path planning for robotic hand/eye system to intercept moving objects[A].IEEE Conf.on Decision and Control, Phoenix, AZ,1999:2963-2968.
