船载超短基线海上标定方法探析
2015-11-29张洪欣崔运璐
王 芳,张洪欣,崔运璐
(1. 国家海洋局北海海洋技术保障中心,山东 青岛266033;2. 山东省海洋生态环境与防灾减灾重点实验室,山东青岛 266033)
船载超短基线海上标定方法探析
王 芳1,2,张洪欣1,2,崔运璐1,2
(1. 国家海洋局北海海洋技术保障中心,山东 青岛266033;2. 山东省海洋生态环境与防灾减灾重点实验室,山东青岛 266033)
声学定位系统的技术研究和应用开发在现代海洋科学调查和水下施工中起着重要作用。本文以国产某型超短基线定位系统为例,结合载人深潜试验性应用航次中对蛟龙号的定位服务,就超短基线声学定位系统的海上标定方法展开了讨论。
声学定位系统;超短基线;水下定位;标定
0 引言
超短基线水下定位系统在现代海洋测绘中发挥着重要作用。在安装超短基线定位系统进行水下声学定位测量过程中,很难保证换能器中心与母船重心之间三坐标轴完全重合,即存在系统偏差,它是导致超短基线系统定位出现误差的一个重要原因,必须对超短基线进行校准。
超短基线水下声学定位系统是根据声波在水中传播的速度往返时间测量距离和同时测量相位差的方法进行定位。超短基线定位系统一般由声学测量设备和数据采集处理设备两大部分组成。声学测量设备由安装在船体的声学换能器和安装在水下的声学应答器组成,声学换能器发射声波信号至应答器,应答器接在收到讯问信号后,发射区别于讯问信号的响应信号回换能器,响应信号经由通讯电缆传输给数据采集处理设备,做进一步加工处理和计算,得到应答器相对于换能器的空间位置和深度。
船载超短基线换能器中,有至少3个单元,应答器安装在需要定位的目标上,换能器测量出到应答器的水平和垂直角度及斜距。超短基线的标定工作是确保水下目标精确定位的基础,选择正确的标定方法,对提高定位精度及其重要。
1 标定方法
本文中的标定过程分为浅海安装偏差校准、深海定位精度校准和拉距试验三步,浅海安装偏差校准是整个标定试验的基础,深海定位精度校准和拉距试验是验证超短基线指标的重要环节。
1.1 母船噪声测量
母船分别以0节、2节、3节、4节、6节航速的速度行驶,测量对应条件下的噪声值,每种条件下测量20次,每2s测量记录一次。母船整体噪声水平在60dB/Hz左右,到达超短基线作业需求。表1为各航速条件下测得的母船噪声谱级。

表1 母船噪声谱级
1.2 安装偏差标定校准试验
安装偏差标定校准试验在水深1000m海域进行。试验采用母船先顺时针跑一个半径约1000m的圆形轨迹,再以同样半径逆时针跑一个圆形轨迹,最后跑两条相交直线轨迹,交叉角度为60°,如图1、2所示。标定试验结果表明,国产某型超短基线数据连续稳定,有效率达95.4%,定位精度为0.68%斜距。
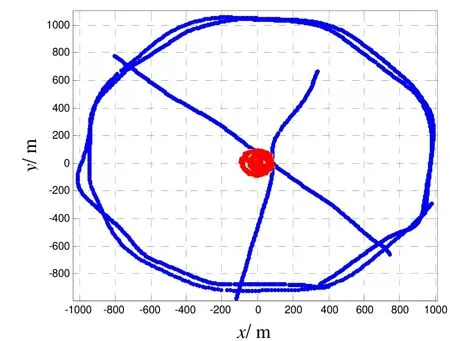
图1 校准航迹

图2 校准后定位结果散点图

表2 校准结果表格
1.3 定位精度标定校准试验
定位精度标定校准试验在水深3000m海域进行。试验采用母船分别跑一个半径约 800m的圆形轨迹和半径为 1800m的圆形轨迹进行验证,分别对应 15°、30°的半开角,如图3、4、5所示。试验结果表明,3000m水深条件下,±15°开角时超短基线定位精度大约为0.41%斜距;±30°开角时定位精度为0.62%斜距。国产某型超短基线定位性能稳定,数据有效率到达98.6%。
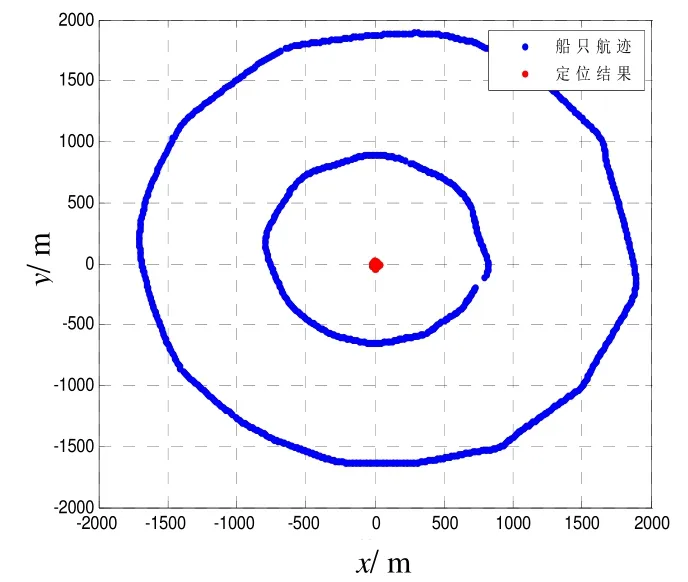
图3 试验航迹及定位结果
1.4 拉距试验
完成定位精度测试后,母船以 4节左右的速度远离声信标行驶。行驶过程中验证超短基线对声信标的定位结果,如表 3所示。可发现,国产某型超短基线定位的稳定性很高。国产某型超短基线在开角范围内对目标具有稳定的定位跟踪性能。
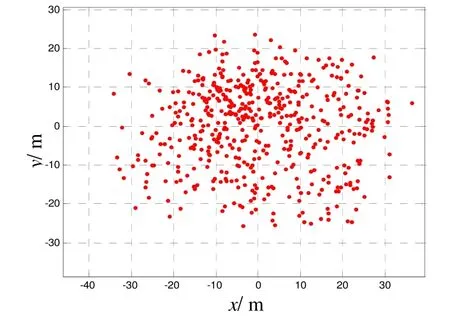
图4 ±30°开角的定位结果放大图

图5 ±15°开角的定位结果放大图

表3 拉距试验有效率统计结果
2 小结
本研究中国产某型超短基线海试先后完成了母船噪声测量、浅海安装偏差校准、深海定位精度验证和拉距试验4项试验内容。试验表明:在3000m水深条件下,±15°开角时超短基线定位精度大约为0.41%斜距;±30°开角时定位精度为0.62%斜距;国产超短基线定位性能稳定,数据有效率到达98.6%。超短基线在开角范围内对目标具有稳定的定位跟踪性能。该超短基线能完成对水下拖体、ROV、载人潜水器的精确定位。同时,试验也证明本次超短基线的海上标定方法有效、简单、快捷。
[1] 唐秋华, 吴永亭, 丁继胜, 等. 超短基线声学定位系统的校准技术研究[J]. 声学技术, 2006(4): 8-10.
[2] 李想, 张殿伦, 孙大军, 等. 高精度超短基线定位系统的实现[J]. 计算机工程与应用.2007(24):180-182.
[3] 肖亮, 韩焱. 基于多阵元基阵的超短基线声定位方法[J]. 弹箭与制导学报. 2006(4): 271-273.
Analysis on Shipborne Ultrashort Baseline Calibration Approach at Sea
WANG Fang1,2, ZHANG Hong-xin1,2, CUI Yun-lu1,2
(1. State Oeanic Aministration of North Sea Marine Tchnical Spport Ceter, Qingdao 266033, China; 2. The Marine Ecological Environment and Disaster Prevention and Mitigation of Shandong Province Key Laboratory, Qingdao 266033, China)
The research and application on acoustic positioning system technology plays an important role in modern marine science survey and underwater construction. Taking some type of Ultra Short Baseline (USBL) Positioning System produced in China as an example, combining the positioning service for Jiaolong submersible in the manned deep diving trial application voyage, the calibration method of USBL acoustic positioning system at sea is discussed.
acoustic positioning system;ultra short baseline (USBL);underwater positioning;calibration
TP212
A
10.16443/j.cnki.31-1420.2015.01.003
王芳(1978-),工程师,硕士研究生。从事载人深潜的技术保障工作。
