基于反步滑模控制器的水下平台应急系统研制
2015-11-29祝诗扬徐国华赵春城黄明辉
祝诗扬,徐国华,金 奎,赵春城,黄明辉
(1. 华中科技大学 船舶与海洋工程学院,湖北 武汉430074;2. 中国船舶重工集团公司750试验场,云南 昆明650000)
基于反步滑模控制器的水下平台应急系统研制
祝诗扬1,徐国华1,金 奎1,赵春城1,黄明辉2
(1. 华中科技大学 船舶与海洋工程学院,湖北 武汉430074;2. 中国船舶重工集团公司750试验场,云南 昆明650000)
介绍了水下平台应急系统的功能及组成。针对液压张力绞车速度伺服控制特性,提出了一种自适应滑模反步控制器。在建立的平台及液压绞车数学模型的基础上,详细论述了控制器的设计过程并对控制规则进行了分析。通过MATLAB软件对控制器进行了仿真,通过验证后得出:滑模控制比PID控制具有快速准确的跟踪且抖动小的优点。最后,通过水下平台及应急系统的物理试验,验证了水下平台应急功能。
水下作业平台;应急系统;液压速度伺服控制;反步滑模控制
0 引言
随着我国海洋事业的大力发展,水下平台作为水下作业的载体越来越被广泛利用。水下作业平台采用张力腿技术进行水下定位,根据相关传感器反馈的平台姿态信息,通过调节水下绞车张力腿缆绳钢缆长度,实现平台的定深及姿态的伺服控制。但是,水下作业平台在深水作业的环境非常恶劣,时常面临着各种各样的危险,一旦遇到危险需要及时回收水下作业平台,因为研制一个平台投入了大量的人力、物力、财力,而且每次下水作业所获得的资料也具有极大价值[1]。如果因故障造成平台失事,将会造成极大的损失。因此,水下作业平台发生故障后的应急处理措施也成为作业平台研制的关键性技术之一。
1 应急系统的工作原理、功能和组成
1.1 应急系统的工作原理和功能
平台正常工作时,水上控制单元通过光电复合缆给水下作业平台提供通信通道和电源,此时应急系统实时监测水下电源及光纤通信通道。若发生电力故障或通信故障,30min内系统仍然无法恢复,则由水下应急控制器判断自动控制释放机构电动作动筒动作,释放应急浮标,浮标依靠正浮力将应急电缆带至水面。工作人员通过浮标快速接头完成水上和水下应急电缆对接,建立应急电源及通信通道。操作人员通过应急操作面板发送控制指令至水下执行机构,控制平台安全回收[2-3]。
1.2 应急系统的组成
平台应急系统由水上应急单元及水下应急单元两部分组成:水上单元包括水上应急控制器、触摸屏、应急操作面板,工控机和显示器;水下应急单元包括UPS、应急浮标释放机构、应急电缆、应急照明系统、水下应急控制器、绞车控制器、平台位姿控制器及进排水控制器。
1.2.1 应急释放装置
应急浮标释放机构由自浮滚筒、应急电缆及电动作动筒等组成。应急浮标实物图如图1所示。

图1 应急浮标实物图
自浮滚筒由浮力材料制成,应急电缆在水中接近零浮力,应急浮标入水后呈一定的正浮力,平台正常工作时,安装在平台上的作动筒锁住固定应急浮标的束缚带确保其不释放,一旦应急程序启动,作动筒的电动作放开束缚带,应急浮标开始上浮。由于电缆一端通过电缆网套固定在平台上,自浮滚筒一边上浮一边旋转实现放缆。待浮标到达水面后将水面应急缆连接到浮标的水密插座上,完成水上和水下应急缆对接。应急电缆由3芯等效截面积6mm2电源线和1对屏蔽双绞线组成,能同时提供通信和电力通道。
1.2.2 应急系统网络结构
水下作业平台在正常工况下,水上应急控制器和水下应急控制器通过光电复合缆以太网通信。以太网通信发生故障,水下应急控制器自动判断释放浮标,建立应急通信通道后,水上和水下通过应急缆 RS485完成通信。水下应急控制器和其他三个重要控制器(平台位姿控制器、进排水控制器、绞车控制器)的通信也是通过以太网进行数据交换,RS485通道为备用。这种冗余设计进一步保证平台进入应急状态时的通信正常。应急系统的通信结构如图2所示。

图2 应急系统通信流程图
2 应急系统上浮模式介绍
水下作业平台结构如图3所示。它主要由平台主体、四台液压绞车,柔性钢缆。重力锚组成。平台在水下作业时,通过四台张力绞车张紧力定位平台[4]。平台设备出现故障,需应急上浮回收,以便进行维修。平台应急上浮过程受力学分析如下:
水阻力Z:

考虑惯性力G,平台在上浮时附加质量:

平台在水下受力:
式中,C为水的阻力系数,取值为0.22;ρ为水密度,取值为 1.0×103kg/m3。
平台面积:S=900m2
平台质量:M=2.5×106kg

由(1)~(4)可得,平台加速度与速度V关系为:

用Matlab软件求解该非线性微分方程有:


图3 水下作业平台示意图
由方程解可知,平台在水深100m,如果直接打开绞车伺服控制油路,上浮平均速度约为2.5m/s (平台正常工况上浮时,控制上浮速度不超过2.0m/min)。此时张力绞车被动高速放缆,驱动马达会因转速过快损坏;同时,四台张力绞车速度因张力不均匀难以同步,导致平台倾斜过大,可能引起侧翻等安全事故。为达到控制平台安全平稳上浮的目的,应急系统设计了三种模式:
应急模式一:制动器打开,通过调节电液比例阀的阀芯开口控制绞车马达转速,完成平台平稳上浮。
应急模式二:制动器打开,通过控制开关节流阀的开关控制绞车马达速度,完成平台平稳上浮。
应急模式三:液压马达浮动,刹车开启或关闭,完成上浮。
如图 4所示,箭头方向为应急模式液压油流向。伺服泵从PA口给应急油路补油,在回油路中串入比例节流阀DT1.1(模式一)和开关节流阀DT1.4(模式二),其中比例节流阀和开关节流阀并联。通过控制比例节流阀DT1.1开口和开关节流阀DT1.1开闭实现张力绞车滚筒被动放缆,同时打开张力绞车刹车和锚泊绞车浮动阀,通过上述操作实现平台应急上浮。
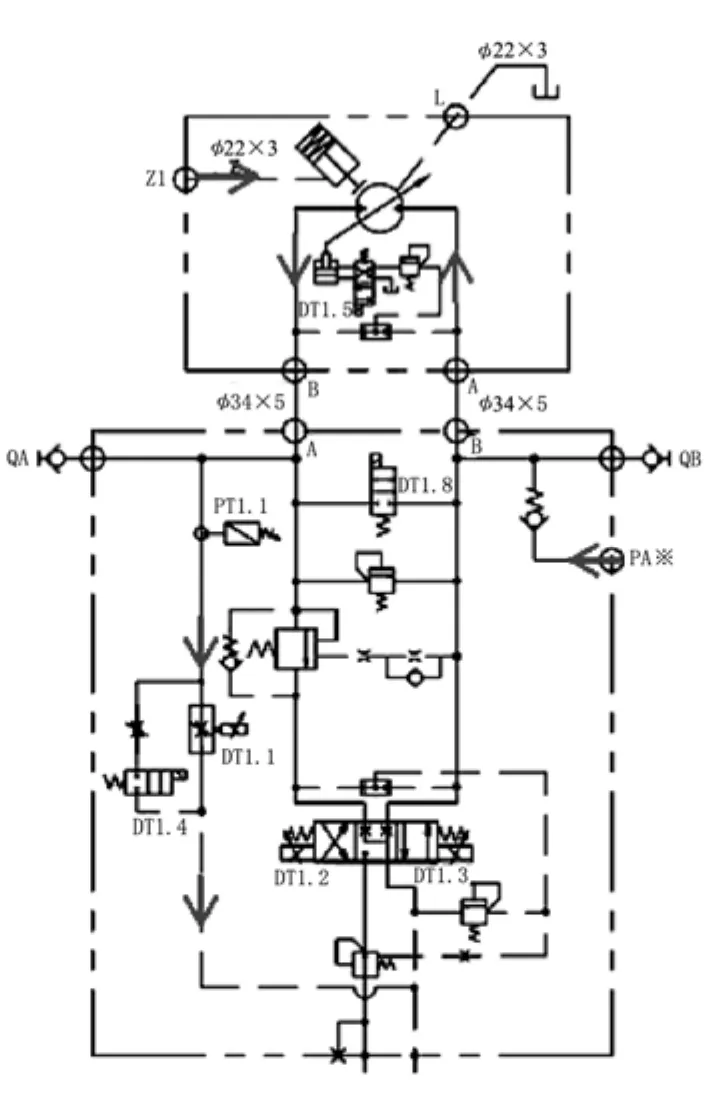
图4 应急系统液压系统图
三种应急模式为冗余设计,某个应急模式故障时,不影响其他应急模式。但模式三会造成绞车马达的损坏,一般不采用。模式一对速度的控制精度最高,是主要应急模式,只有该模式失效后,才启用另外模式。本文主要针对模式一设计控制器。
3 应急系统控制器设计
3.1 平台伺服液压系统建模
液压回路回油量通过电液比例节流阀的开口大小调节,比例节流阀开口大,背压减小,回油量增大,马达转速增大,平台上浮速度增大。为了防止平台上浮速度过快,绞车安装了测速传感器,通过速度反馈控制比例节流阀开度。其速度控制系统方框图如图 5所示。

图5 单台绞车速度伺服原理框图
平台在应急上浮过程中,液压系统实际工作过程中参数负载总惯量、总泄露系数、液压油体积弹性模量、粘性阻尼系数、外负载力矩等都可能存在一定的不确定性。设计自适应控制器的目的是在不确定参数定常或者慢时变情况下,通过所设计控制器使系统的速度输出快速准确跟踪速度给定信号[5]。
阀控液压马达基本方程的拉普拉斯变换式[6]:
1)阀的流量方程:

2)液压马达流量方程:

3)力矩平衡方程:

式中,Cd为阀口流量系数;w为阀面积梯度;Ps为液压泵供油压力;ρ为液压油密度;Dm为液压马达排量;Vm为油腔体积;βe为体积弹性模量;Ctm为总泄露系数;Jt为总惯量;Bm为粘性阻尼系数,TL为马达轴上外负载力矩。
由(5)、(6)可得:

由(7)可得

由(8)、(9)可得
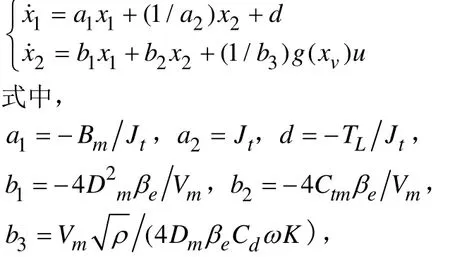
g( xv) =u是系统控制输入,即比例节流阀输入电压。
3.2 反步滑模控制器设计
根据Lyapunov稳定性理论,基于反步算法进行系统控制器设计。下面的推导过程中,xi(i=1,2)为系统状态的实际值;xid(i=1,2)为系统状态变量的期望值。
定义速度跟踪误差:

对e1求导有:

定义Lyapunov函数:

对式(12)求导,得:


将式(15)代入式(13)得:

第2步对e2求导:

定义Lyapunov函数:

对式(18)求导得:

则设计自适应控制器为:

其中:
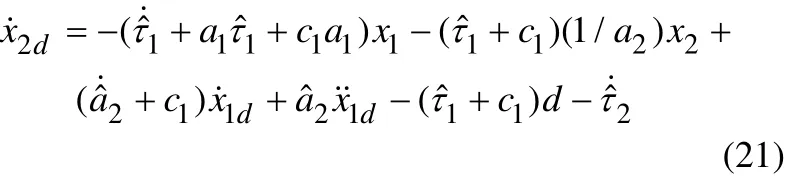
则式(19)可转化为:
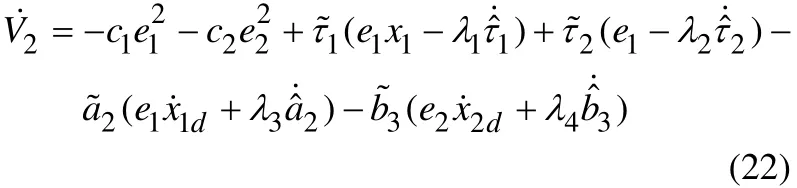
则设计的参数自适应律为:

作业平台控制系统液压参数:Jt0=152.06kg•m2;Ctm=1.9×10-11m5/(N•s);Bm0=800N•S/m;βe=7.0×108Pa;Vm=1.47×10-3m3;Dm=100ml/r;TL0=214.9254N•m;K1=1.25×10-3。
所设计的反步控制器控制参数c1=5000,c2=1
在这里把作用在平台上的水动力及干扰力传递到液压马达的轴上,作为马达外负载力矩的一个分量来考虑。因此,本文中主要考虑负载总惯量Jt、粘性阻尼系数Bm及外负载力矩TL的不确定性。假设这些参数分别按如下规律变化,即:

4 控制系统仿真
利用MATLAB软件平台,对所设计的液压速度伺服反步滑模控制器与常规的PID控制器进行了数值仿真,对他们的控制效果进行比较分析。单台绞车速度伺服自适应反步控制仿真图如图6所示。

图6 单台绞车速度伺服自适应反步控制仿真
仿真所选用的常规PID控制器参数为:

假设系统的外负载力矩扰动信号TL为白噪声。由仿真结果可以看出,常规PID控制存在一定的跟踪误差,而反步滑模控制器表现出了更好的控制精度和响应速度,如图7、图8所示。说明自适应反步控制器能够实现高精度的速度伺服。为水下作业平台应急上浮的同步控制实现奠定了基础。
5 现场试验
水上主控制器和水下主控制器通信中断,水下应急控制器直接向水上应急控制器发送电力指令反馈,水上水下仍然无法建立连接,水下应急控制器判断通信故障,30min后自动释放浮标。操作人员完成水上水下应急缆对接。切换至应急上浮模式一,平台进入应急上浮程序。调节液压系统四个比例节流阀开口一致,同时控制四台张力绞车放锚。监控钢丝绳的张力、速度、张力绞车的位移及马达压力。
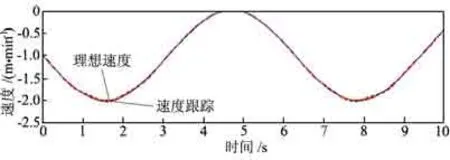
图7 反步滑模控制器正弦输入响应

图8 常规PID控制器正弦输入响应

图9 作业平台半潜水中

图10 作业平台浮出水面
水下作业平台从半潜到浮出水面的过程中,四台张力绞车的放缆速度稳定,平台倾角的变化不超过0.1°,满足应急上浮时对速度的控制要求。图9为作业平台半潜水中,图10为作业平台浮出水面的场景。
6 总结
本文设计了一种水下作业平台的应急系统,并对其组成和工作原理进行了介绍。为了控制水下平台应急工况下平稳上浮,针对平台绞车液压速度伺服控制系统,设计了反步滑模变结构控制器,对建立的液压模型进行Matlab仿真。结果表明,与传统PID控制系统相比,自适应反步控制器表现出了更好的控制精度和响应速度,适用于对单台绞车速度的精确控制,也为平台应急上浮过程四台绞车同步控制奠定了基础。最后,通过现场试验进一步验证了应急系统满足平台对速度的控制要求,验证了平台应急系统的功能性与可靠性。
[1] Rober A George, Jih-Ping Shuy, Eric Cauquil.Deepwater AUV logs 25,000 kilometers under the sea[J]. Arlington:Sea Technology, 2003, 44(12):10-13.
[2] 唐荣庆, 曹志裕, 张希贤. “探索者”号自治水下机器人抛载系统的研制[J]. 海洋工程, 2001(2):85-87.
[3] 何晓燕, 张永林. 水下遥作业系统的协调控制的研究[J]. 船舶工程, 2013, 35(3): 67-70.
上船公司接获8艘新船订单
作为国内建造大型重吊船和中型集装箱船的翘楚,上海船厂船舶有限公司刚进入2015年就实现接单“开门红”:1月8日,该公司与中远航运股份有限公司签订了4+2艘2.8万吨多用途重吊船合同;1月5日,该公司承接了中国外运阳光速航运输公司2艘4000TEU集装箱船订单。
多年来,世界船市一直萎靡不振,但是上船公司凭借过硬的技术实力,在大型重吊船和中型集装箱船领域打下一片天地。去年,该公司为中远航运建造了4艘同类重吊船,之前还为中波航运公司和其他航运公司建造了3.2万吨重吊船等。在中型集装箱船方面,该公司更是凭借独有的研发设计优势和雄厚的施工实力,已为国内外船东建造了数十艘多种型号的中型集装箱船。今年1月2日,该公司为荷兰尼罗河航运公司建造的3500TEU集装箱船“尼罗河德雷赫特”号交付。
(沈晓峰)
Development of Underwater Platform Emergency System Based on Backstepping Sliding Mode Controller
ZHU Shi-yang1, XU Guo-hua1, JIN Kui1, ZHAO Chun-cheng1, HUANG Ming-hui2
(1. School of Naval Architecture and Ocean Engineering, Huazhong University of Science and Technology, Wuhan 430074, China; 2. No.750 Testing Field, CSIC, Kunming 650000, China)
The function and composition of the underwater emergency system are introduced. Aiming at speed servo control characteristics of a hydraulic tension winch, a sliding mode adaptive backstepping controller is put forward. On the basis of the mathematical model of founded platform and the hydraulic winch, the controller design process is discussed and the controlling rules is analyzed. The controller is simulated by MATLAB software. After the verification, it is obtained that sliding mode control has advantages of fast, accurate tracking and small jitter, compared with PID control. Finally, through physical experiment of underwater platform and emergency system, underwater platform emergency function is verified.
underwater platform; emergency system; hydraulic servo speed control; backstepping sliding mode controller
TP273
A
10.16443/j.cnki.31-1420.2015.01.001
国防条保重大专项(026114024)
祝诗扬(1987-),男,在读硕士研究生,研究方向为水下机器人作业技术
