飞思卡尔智能赛车电源模块的设计与制作
2015-11-25程新华
□曹 磊 程新华
一个功率转换效率高的,且稳定、电流大的电源,在设计控制系统时很重要。它是整个系统的能量来源,所以对于电源的设计和研究十分必要。
一、电源设计
稳压器集成电路硅片的选择:电源模块的设计中,有许多种电压调节器集成电路硅片可以直接使用,为了克服电路分散元件多,焊接点多,调试繁琐的问题,要使电路设计更简单。所以可以采用串联稳压和开关稳压两大类芯片,开关稳压芯片LM2596,LM2575 等的工作效率高,但电源噪声高,自身耗电量较大,负载功率大的电路,适合采用开关稳压电路。串联型稳压芯片LM7805,LM7806 等具有输出电压可调,输出电流范围大,输出电阻小(驱动负载能力强),稳压性能好,输出纹波小。负载功率小的电路,适合串联型稳压芯片。在电源管理芯片的选择中,由于电池容量是7.2 V,2Ah,电压高于各模块额定电压,因此选用降压型串联型稳压芯片,常用的芯片有LM7805 和LM7806。但是由于指定的供电电池只有7.2 伏,以及LM7805 和LM7806 要想正常工作,其之间的输入和输出引脚的压力差通常为2~3 伏,驱动电动机工作时,会引起瞬间的电池电压下降,会影响其它模块的正常工作。
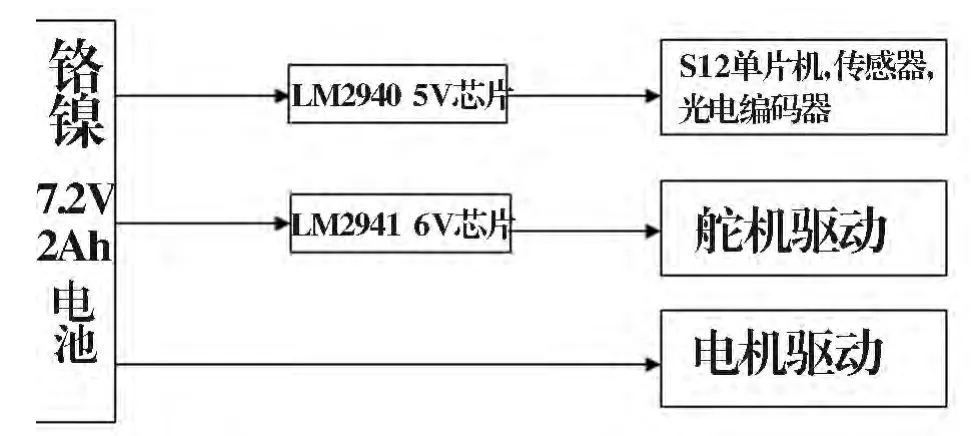
图1 电源管理模块方框图
因此利用压差为大约0.5 伏,额定电流1A 的LM2940 系列稳压器,给感应模块和速度检测感应传感模块提供5V 直流电源。选择LM2941 系列可调电压的集成电路硅片,提供给独立的转向伺服马达一个6 V 直流电。动力驱动马达电能从7.2 V 电池直接取用。考虑到引起驱动马达启动瞬间并不稳定,在输入,输出,电源加入了适合的滤波电路。电源管理模块方框图如图1 所示。
二、直流稳压电路设计原理
用LM2940 低电压芯片,芯片封装形式:TO-220(国产)。5 V 输出电压,输出电流1 A,0.8 V 的电压差,它含有静态电流降低电路、限流、过热保护、电池反向连接和反出入保护。使用它对单片机,传感器和速度检测模块提供所需的5 V 直流电源,虽然相互有些干扰和影响(当然可以用三片LM2940 5 V 芯片对三个模块独立供电),但简化了电路,减轻了重量,节省了电池能量,通过比较还是可行的。用LM2941 串联可调稳压集成电路硅片一片,对转向伺服马达供应6 V 左右直流电。为了防止马达启动引起电压不稳定对其他电路工作带来影响,稳压电路和电池都并联有合适的滤波电容。
(一)输出为5 伏的LM2940 稳压。LM2940 串联稳压集成电路硅片是塑封三脚元件,1 号pin 为输入,2 号pin 为公共端,三号pin 为输出。电池7.2 V 通过100 微法电容滤波输入到LM2940 1 管脚,2 管脚公共端接地,3 管脚输出经100uf和0.1uf 电容滤波后输出5V 直流电,对中央控制模块、感应模块和速度感应三大模块供电。

图2 LM29405V、LM2941 6 V 两芯片组合的稳压电路原理图
(二)输出为6 伏的LM2941 稳压电路(LM2941 1 片,电容器4 个,电位器1 个)。LM2941 是四脚塑封立式串联可调稳压集成电路硅片,1 号pin 是取样调整端,3 号pin 是公共端,5 号pin 是输出端,4 号pin 是输入端。电池7.2 V 通过0.1uf,100uf 电容滤波后输入到LM2941 4 管脚,3 管脚是公共端接地,1 号pin 通过10 千欧电阻R1 取样调整输出,5 号pin经过100 微法,0.1 微法电容滤波,输出6V 左右的直流电对转向伺服马达供电。
(三)LM29405V、LM2941 6 V 两芯片组合的稳压电路原理图。实际制作时两片电源芯片是组合在一起的,如图2 所示。
三、结语
飞思卡尔智能赛车电源模块自主设计的电路部分,对电子学理论及操作水平有很高的要求,花大量时间进行了筛选,实验,最终确定了这些方案。在后来软硬件调试和参赛实践中,没有出现大的故障,说明它们设计比较合理,在此供初学者参考。
[1]龙光利.一种多功能遥控智能小车的设计[J].陕西理工学院学报(自然科学版),2014
[2]罗文骥,谢冰.电气化铁道地面带电自动过分相系统技术的研究与应用[J].铁道机车车辆,2008
[3]马帅旗,张伟.基于语音识别的机车自动过分相装置的研制[J].陕西理工学院学报(自然科学版),2014
[4]赵振德.多功能遥控智能车的制作[J].电子制作,2011
[5]赵明敏,田丽.基于改进支持向量机的车牌识别[J].陕西理工学院学报(自然科学版),2014
[6]王旭.框架式导引头数字控制器设计[D].南京理工大学,2008
[7]李佳旭,丁鹏飞.基于ISD1760 的智能语音计费显示系统设计[J].电子元器件应用,2010